Swarm Robotics
Coordinating Collective Intelligence
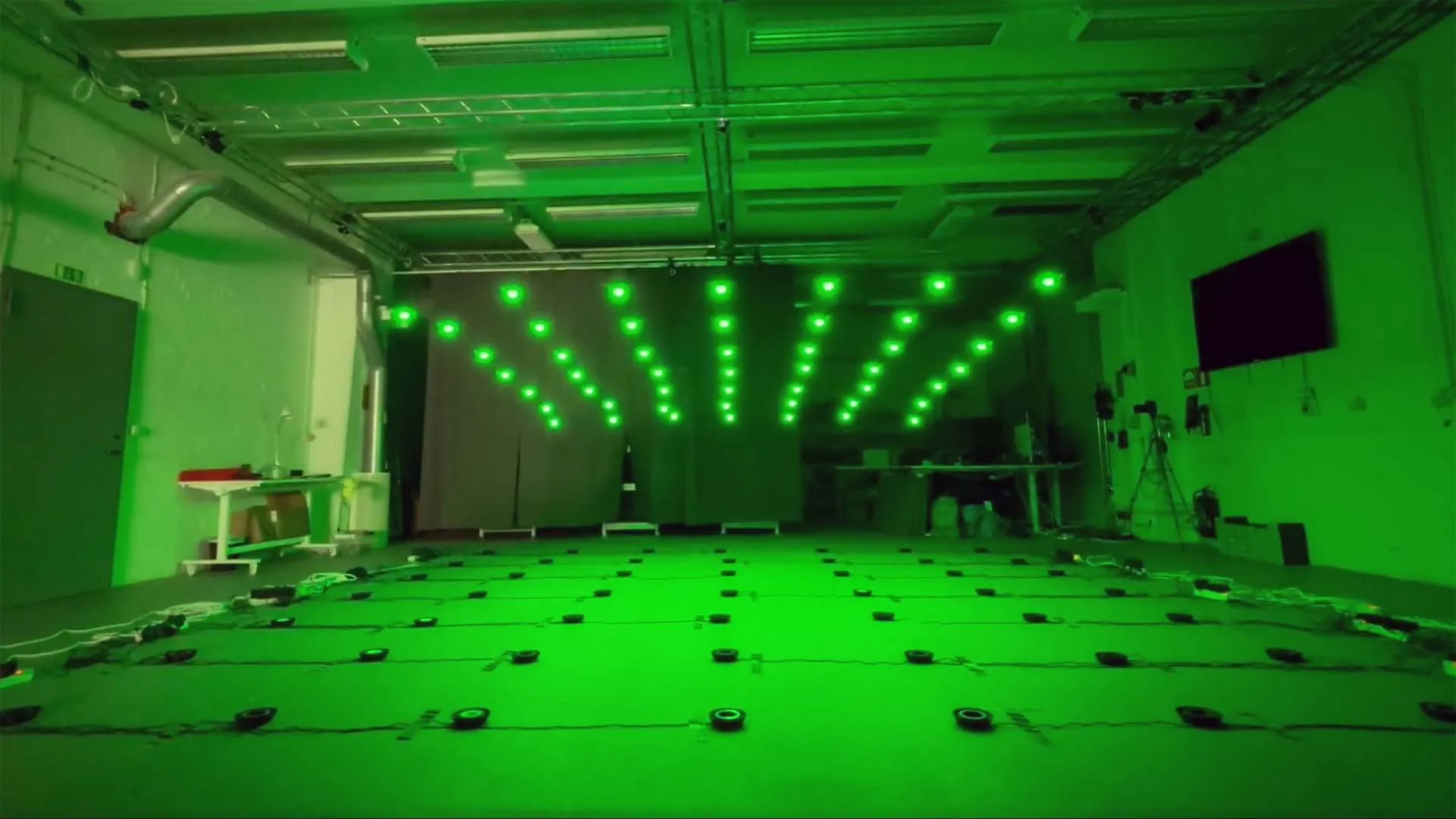
Swarm robotics investigates how multiple robots cooperate, self-organize, and adapt to achieve shared goals. The Crazyflie® is one of the most widely adopted physical platforms for swarm research, providing a stable, scalable, and reproducible foundation for studies of collective behavior and distributed control.
Researchers use the Crazyflie to transition from simulation to real-world experiments, exploring scalability, formation control, and decentralized communication frameworks. The system supports low-latency coordination, synchronized trajectories, and reliable inter-agent interaction.
Research Opportunities
- Formation flight and cooperative control.
- Distributed localization and communication.
- Task allocation and swarm learning.
- Emergent behavior and collective adaptation.
- Hybrid simulation–real experiments.
- Collective mapping, exploration, and environmental monitoring.
Research in Action
The examples below reflect recent and ongoing research in swarm robotics, highlighting how the Crazyflie platform is used to evaluate new concepts under real-world conditions across a range of topics, methodologies, and experimental scales.
DMPC-Swarm: distributed model predictive control on nano UAV swarms
RWTH Aachen University
Collision Avoidance and Navigation for a Quadrotor Swarm Using End-to-end Deep Reinforcement Learning
University of Southern California
CrazySwarm: A large nano-quadcopter swarm
University of Southern California
Minimal navigation solution for a swarm of tiny flying robots to explore an unknown environment
TU Delft
Online Trajectory Generation With Distributed Model Predictive Control for Multi-Robot Motion Planning
University of Toronto
Predictive control of aerial swarms in cluttered environments
EPFL Lausanne
Reference Setup
Every project has unique requirements, but many share common building blocks. The configurations below provide practical starting points for swarm robotics research, combining coordinated flight infrastructure, positioning systems, and communication capabilities commonly used in multi-agent experiments.

With the Lighthouse swarm bundle, you will get your very own swarm of Crazyflie Brushless.
Shop Bundle
With the swarm bundle you will get your very own swarm of Crazyflie Brushless.
Shop Bundle
With the Lighthouse swarm bundle, you will get your very own swarm of Crazyflies.
Shop Bundle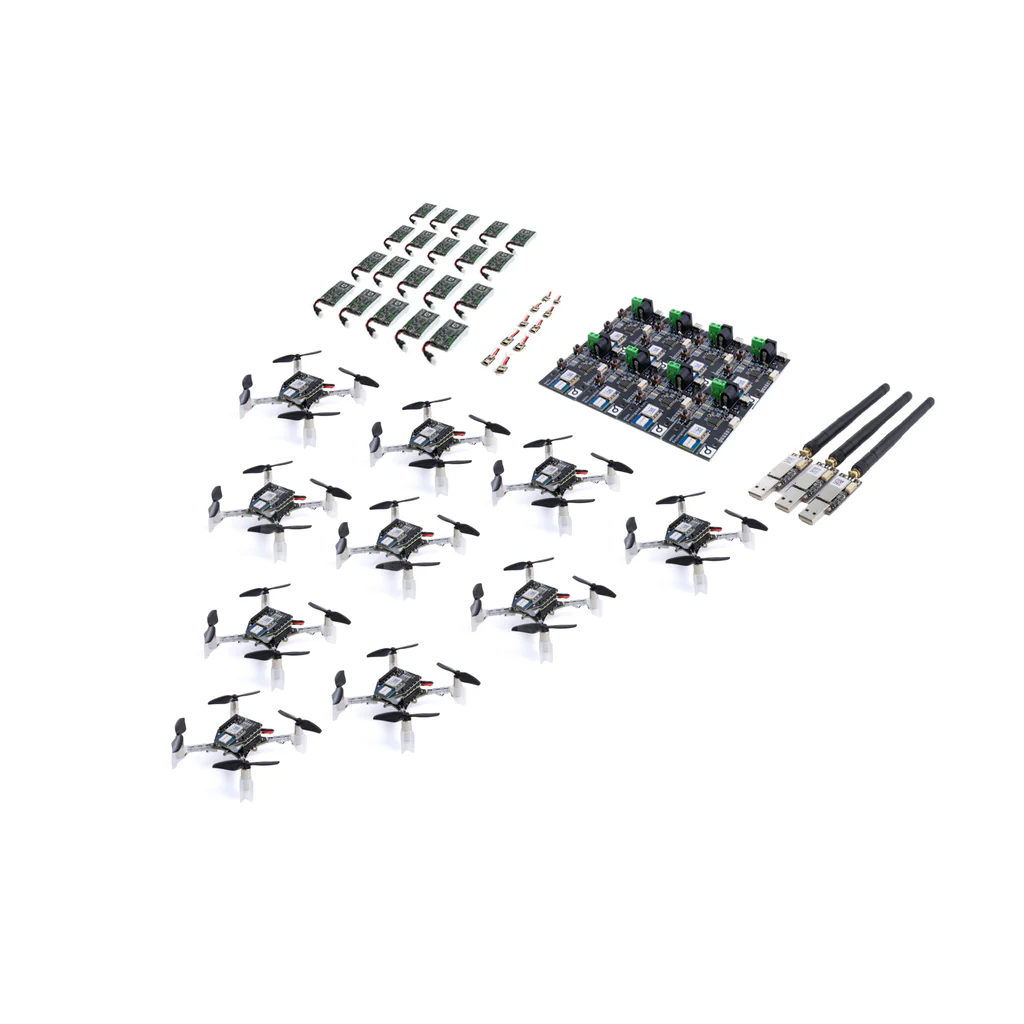
With the swarm bundle you will get your very own swarm of Crazyflies.
Shop BundleRelated Resources
Whether for formation control, cooperative mapping, or multi-agent learning, the Crazyflie offers a compact and trusted research platform for swarm robotics.