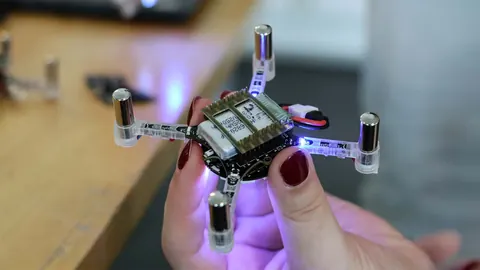
The Crazyflie®
Ecosystem
A modular, programmable, drone system that powers the future of robotics, from classrooms, to labs, to industry.
Explore the Ecosystem ![]()

How researchers, educators, and engineers are using
the Crazyflie to explore autonomy, swarms, and indoor
flight — from labs to early industrial prototypes.


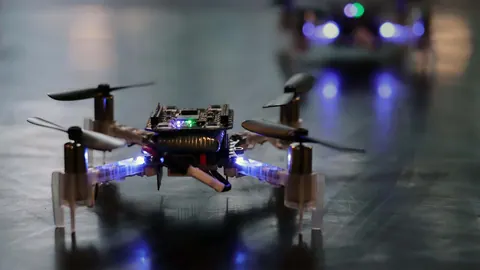

Used by universities and research labs worldwide for swarm robotics, autonomous flight, and indoor positioning research.