WARNING: These instructions are old and might not work anymore
Using a Taranis X9D (Plus) RC transmitter as a controller
If you already own a Taranis X9D (Plus) RC transmitter and want to use it as a controller, it can be configured to work with the Python PC client or the Android client app.
Fortunately the transmitter is able to act as an USB Joystick (see https://github.com/opentx/opentx/wiki/OpenTX-USB-Joystick).
Create a new model for the Taranis X9D (Plus)
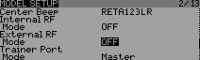
You should create a new model when using the Taranis as an USB Joystick:
- you can turn off both internal and external TX modules
- you need to configure the thrust input (Weight 50% and Offset 50%)
- otherwise you can not use the full travel of the axis assigned to thrust
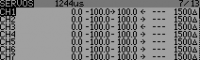
- Servos menu
- invert Thrust (CH1)
- invert Eleron (CH3)


You can also download the configuration as an EEPE file and install it with the OpenTX Companion application.
- USB Joystick EEPE file: usbjoystickforandroidcfclient.eepe.zip
- Download the latest Companion application here: https://www.open-tx.org/2015/07/16/opentx-2.1.0
Python PC client
Configure the Python client
- Turn on the Taranis
- Connect the Taranis with a USB cable to the PC
- Go to Input device → Configure device mapping
- Assign all axes
- (Optional) Save the configuration as a new profile
Or paste the following code in a new file and save it as FrSkyTaranis.json in the conf/input subdirectory of your Python PC client installation:
{
"inputconfig": {
"inputdevice": {
"updateperiod": 10,
"name": "FrSkyTaranis",
"axis": [
{
"scale": -1.0,
"type": "Input.AXIS",
"id": 0,
"key": "thrust",
"name": "thrust"
},
{
"scale": 1.0,
"type": "Input.AXIS",
"id": 3,
"key": "yaw",
"name": "yaw"
},
{
"scale": 1.0,
"type": "Input.AXIS",
"id": 1,
"key": "roll",
"name": "roll"
},
{
"scale": -1.0,
"type": "Input.AXIS",
"id": 2,
"key": "pitch",
"name": "pitch"
}
]
}
}
}
Use the Taranis X9D (Plus) with the Python client
- Before connecting to the Crazyflie®, check that all axes are working (values should change in the client)
- Attention: Always make sure that the thrust stick is all the way down before connecting to the Crazyflie
- Fly the Crazyflie with the Taranis and have fun! :-D
Further ideas to explore
- Configure switches on the Taranis as buttons for emergency stop, etc.
- Try out dual rates and/or expo
Android client
Configure the Crazyflie Android client app
Here are the necessary steps to configure the Crazyflie Android client:
- Turn on the Taranis
- Connect the Taranis with a USB cable and a USB host (OTG) adapter to the Android device
- The Taranis screen should display a USB symbol when it’s connected
- Check that all sticks are in center position
- Open the Crazyflie Android client
- Go to Preferences → Controller Settings and switch Controller to Gamepad
- Go to Gamepad axis and button mapping and configure the following axes
- Right analog X axis should be AXIS_Y
- Right analog Y axis should be AXIS_Z
- Left analog X axis should be AXIS_RX
- Left analog Y axis should be AXIS_X
- Depending on the mode you are using on the Taranis (Mode 1 or 2), set the Mode in the Android app
- Preferences → Flight control settings → Mode
Use the Taranis X9D (Plus) with the Crazyflie Android client
- Before connecting to the Crazyflie, check that all axes are working (values should change in the Android app)
- Attention: Always make sure that the thrust stick is all the way down before connecting to the Crazyflie :!:**
- Connect to the Crazyflie 2 over BLE
- If you have a Crazyflie 1 you need to use a (powered) USB hub to connect both the Taranis RC transmitter and the Crazyradio USB dongle
- Fly the Crazyflie with the Taranis and have fun!