The Crazyflie® family is a range of devices with similar hardware and firmware, but with differeces in size and properties. This page drills further into the hardware and firmware of the devices, as well as in how to extend and expand the devices with new hardware.
Note: When the documentation and code refers to “the Crazyflie”, it applies to all members of the family in most cases.
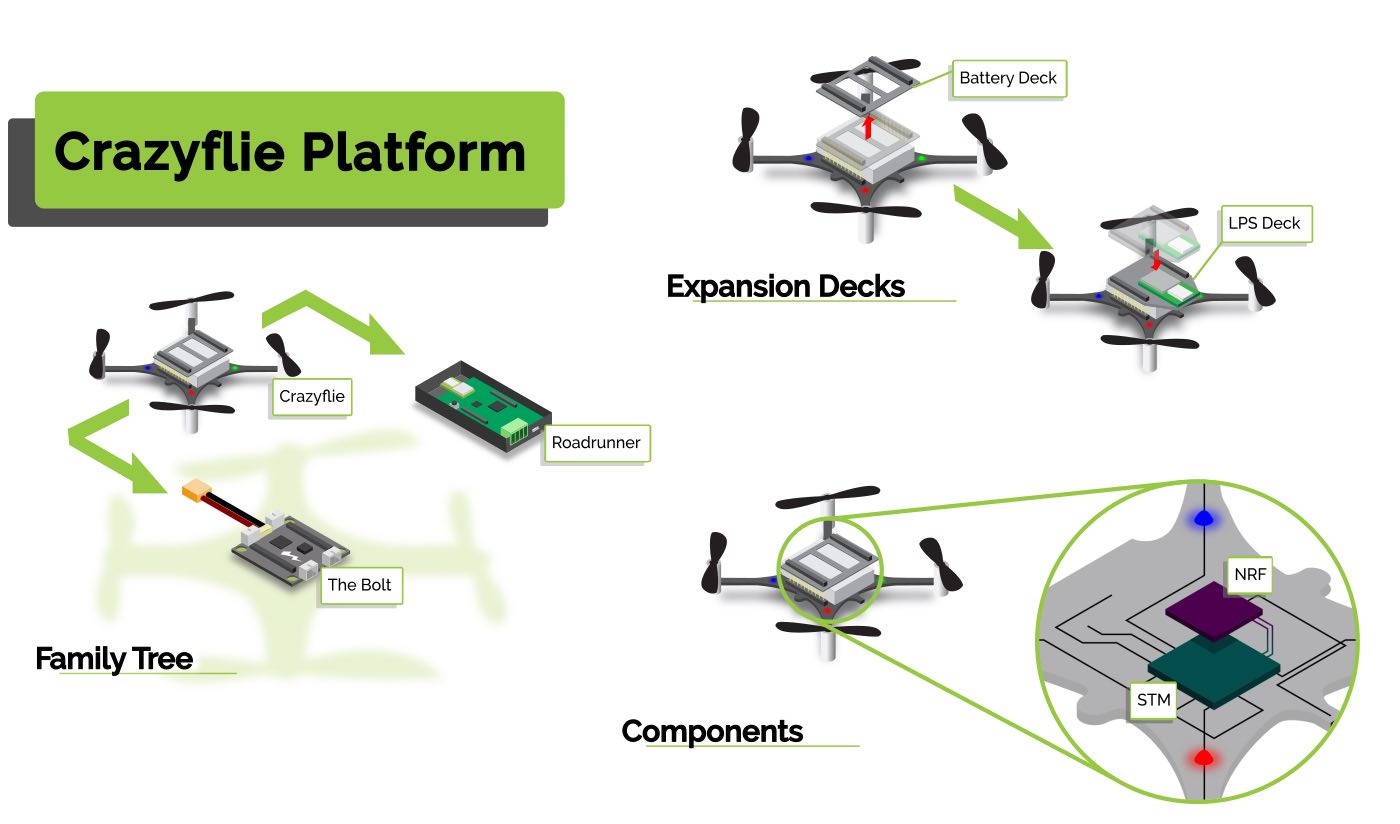
Hardware Components
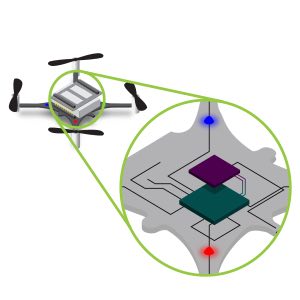
The Crazyflie consists of many hardware components and LED’s that have all their own functionalities. The two most important components of the Crazyflie are the microprocessors: the STM32F4 handles the main Crazyflie firmware with all the low-level and high-level controls and the NRF51822 handles all the radio communication and power management.
Expansion decks

The Crazyflie can be enhanced by adding expansion decks, which gives the Crazyflie extra capabilities in sensing, positioning or visualization. There is an extensive range of decks available, but the platform is also designed to make it easy to design and add custom decks, enabling the user to use sensors and other devices on the platform. The expansion bus exposes communication buses and GPIO pins to be used by decks as needed.
Family tree

The Crazyflie 2.1+ was released in 2024, and comes with upgraded battery and propellers for an improved flight performance of up to 15%. The Crazyflie 2.1 was released in 2019 and is the base platforms of the family. It is a small (29 grams) and durable quadcopter with an expansion port that enables the user to extend the hardware with expansion decks. The firmware is open source and the flexibility of the platform makes it ideal for research, education or other applications where openess and full control is important.
The Crazyflie 2.1 Brushless was released in 2025 and is the powerhouse of the family. Weighing just 32 grams, it retains the compact size of its predecessors, while featuring brushless motors that allow it to handle heavier loads and deliver more powerful flights. Like the other models, it includes an expansion port for hardware extensions with expansion decks, and its open-source firmware provides the flexibility that makes it perfect for research, education, or any application where openness and full control are essential. This drone is designed for advanced users who need maximum power in a small, versatile package.
The Crazyflie Bolt 1.1 is a quadcopter control board that contains the same hardware components and firmware as the crazyflie, but supports connection of brushless motors of up to 8A per motor. It is intended for larger quadcopter platforms with greater lifting capacity and longer flight time, while still using the Crazyflie ecosystem. It has the same expansion bus as the other Crazyflie devices, making it compatible with the expansion decks.
Crazyflie 2.0, the predecessor of the Crazyflie 2.1 was designed and released in 2014. It is the original member of the family and is fully compatible with the Crazyflie 2.1.