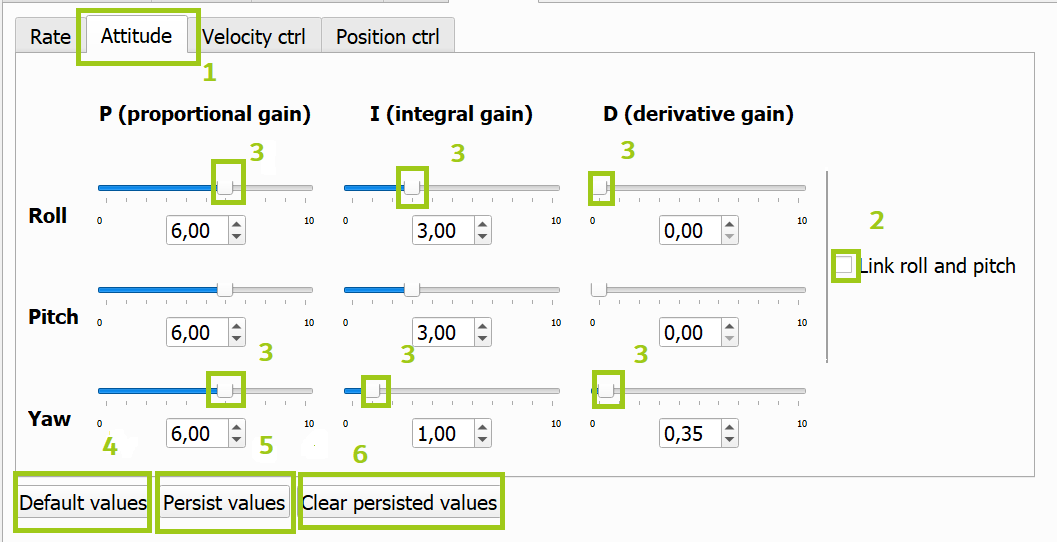
This tab is for tuning the PID controller on your Crazyflie platform.
- Select which part of the controller you want to tune (attitude (rate) or velocity/position)
- Check the ‘link roll and pitch’ or ‘link x and y’ button if you have a symetrical platform, or else it is best to tune those seperately
- Tune the PID gains of controller. This is best done within flight with the controller or flight commander
- If you are not happy with your tuning, default to values there were in before
- If you are happy, it would be best to persist the parameters so it is consistent after startup
- If you want to remove the persistent parameter from the memory, you can also clear it.