The Lighthouse Positioning tab shows information from the Lighthouse Positioning system when present. It is also used to configure and manage the system. For more information on how the Lighthouse system works, please see the firmware documentation.
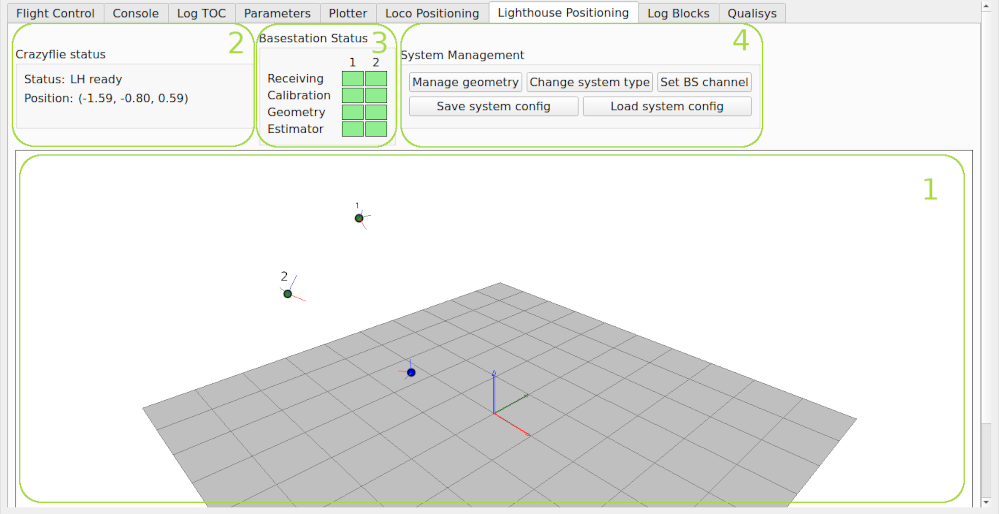
The tab is divided into four sections:
- 3D view of the Crazyfle and the base stations
- Crazyflie Status
- Base stations status
- System management
3D view
The view shows the position and orientation of the Crazyflie (blue) and the base stations (green). The ids of the base stations are displayed as a number and the status using colors. Green means that data from the base station is used in the position estimation.
The graph can be rotated by clicking and draging, zoomed using the scroll wheel and moved by holding the shift key while clicking and draging.
Crazyflie status
The overall status of the Lighthouse system is displayed as a text. The status is one of:
- LH ready - one or more base stations are received and the information is used to estimate the position of the Crazyflie
- Not receiving - no base station is received
- No geo/calib - calibration or geometry data is missing and position can not be estimated
The currently estimated position is displayed in the “Position” field.
Base station status
A detailed status of the base stations is indicated using colors in the grid. All four stages for a base station must be green for the data to be used in the position estimation process. When setting up the system, work from top to bottom and make sure all the boxes above are green before you proceed to the next one.
- Receiving - green = light is received from the base station, red = no reception
- Calibration - indicates if there is calibration data for the base station or not.
- Red = no calibration data
- blue = calibration data from persistent storage but not yet confirmed
- green = calibration data has been received from the base station and matched previous data
- orange = calibration data has been received from the base station but did not match the previous data, this means that you probably should redo the geometry estimation.
- Geometry - indicates whether geometry data is available or not.
- Green = geometry data from persistent storage or has been set from the client
- red = no geometry data. Note: it is possible that the geometry indicator is green even though the geometry data is not valid, this is for instance the case if a base station is moved in a stystem that has been set up earlier.
- Estimator - data from the base station is sent to the estimator to be used in the position estimation process. Note: when Calibration data is received it is automatically stored in the persistent memory to be available immediately after reboot.
System Management
This section us used to configure the system.
-
Manage Geometry - Opens a dialog box displaying the current geometry data. See the Basestation Geometry Management section.
-
Change system type - Opens a dialog box where the system type can be changed. Possible options are Lighthouse V1 and Lighthouse V2. Note: calibration and geometry data is erased when the system type is changed.
-
Set BS channel - Opens a dialog box that is used to set the channel of a Lighthouse V2 base station. Connect one base station at a time to the computer via USB and click the Scan basestation button. If a base station is detected, a new channel can be set by choosing the desired channel and clicking the “Set channel” button.
-
Save system config/Load system config - store and load system configuration to/from file. The system configuration contains system type, calibration and geometry data. When a system configuration is loaded from file it is automatically written to the Crazyflie (and is stored in persistent memory). This is a useful feature when configuring multiple Crazyflies for a system to make sure they all share the same coordinate system.
Basestation Geometry Management
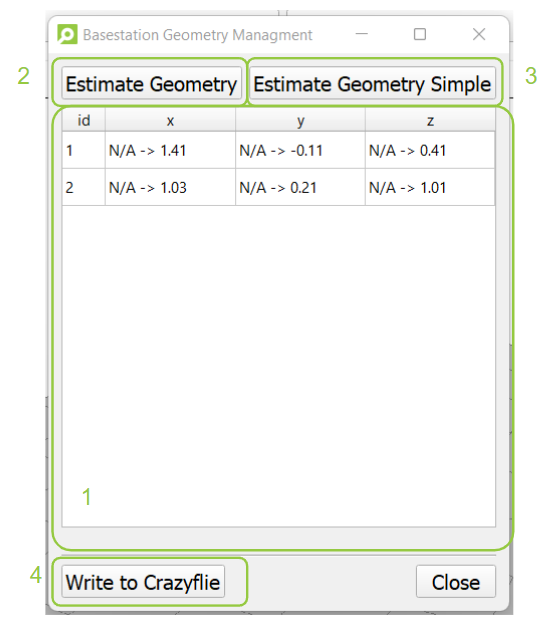
- This shows the current geometry of the basestations that are saved in the Crazyflie’s memory. Either it is empty (no geometry in memory), or there are positions, or there are replacement postions. If you see an arrow like
N/A -> 2.3or2.0 -> 2.3, that means that you just estimated a (new) basestation geometry but it has not been saved to the Crazyflie’s permanent memory yet. - Estimate geometry: This will open a wizard that will follow you through the steps of estimating the positions of the installed basestations. Check out the getting started tutorial for more instructions. This is meant for 2+ basestations
- Estimate geometry simple. This is a simplerer basetation geometry estimation based on the PnP function of OpenCV. If it is grayed out, install
pip3 install opencv-python-headless, but just beware of the incompatibility issues with the regular opencv python packages. This is meant for 1-2 basestations. - Write to Crazyflie: This will write the just estimated basestation geometry (in (1) behind the arrow)) to the permanent memory of the Crazyflie.