Battery Compensation for Crazyflie Platforms
As a LiPo battery discharges, its voltage decreases, which normally reduces the available motor thrust. The Battery Compensation feature ensures that the Crazyflie produces a consistent thrust across the entire battery range. This improves flight stability and performance, especially during longer sessions or when the battery gets closer to depletion.
Recommended when:
- You want consistent thrust and stable flight throughout the battery’s discharge.
- You want to perform normal flight maneuvers or precision flying.
Consider disabling when:
- You want to carry a relatively heavy payload for a short period.
- You want to perform spontaneous or aggressive maneuvers.
Supported Platforms
Battery compensation is currently available for the following platforms:
- Crazyflie 2.1 Brushless
- Crazyflie 2.1+
- Crazyflie 2.X with legacy propellers
- Crazyflie 2.X with the thrust upgrade kit
How to Enable Battery Compensation
The battery compensation feature is configured in menuconfig and is enabled by default on our supported platforms. When modifying the menuconfig, navigate to Platform configuration → Enable battery thrust compensation to enable/disable it.
Methodology
This section explains the process of creating this battery compensation feature, as described by Marcel Rath in this blogpost.
System Identification
To design a proper compensation, the understanding of how thrust relates to motor voltage was needed. This meant running a series of experiments on the thrust stand. The first step was calibrating the loadcell used to measure thrust:
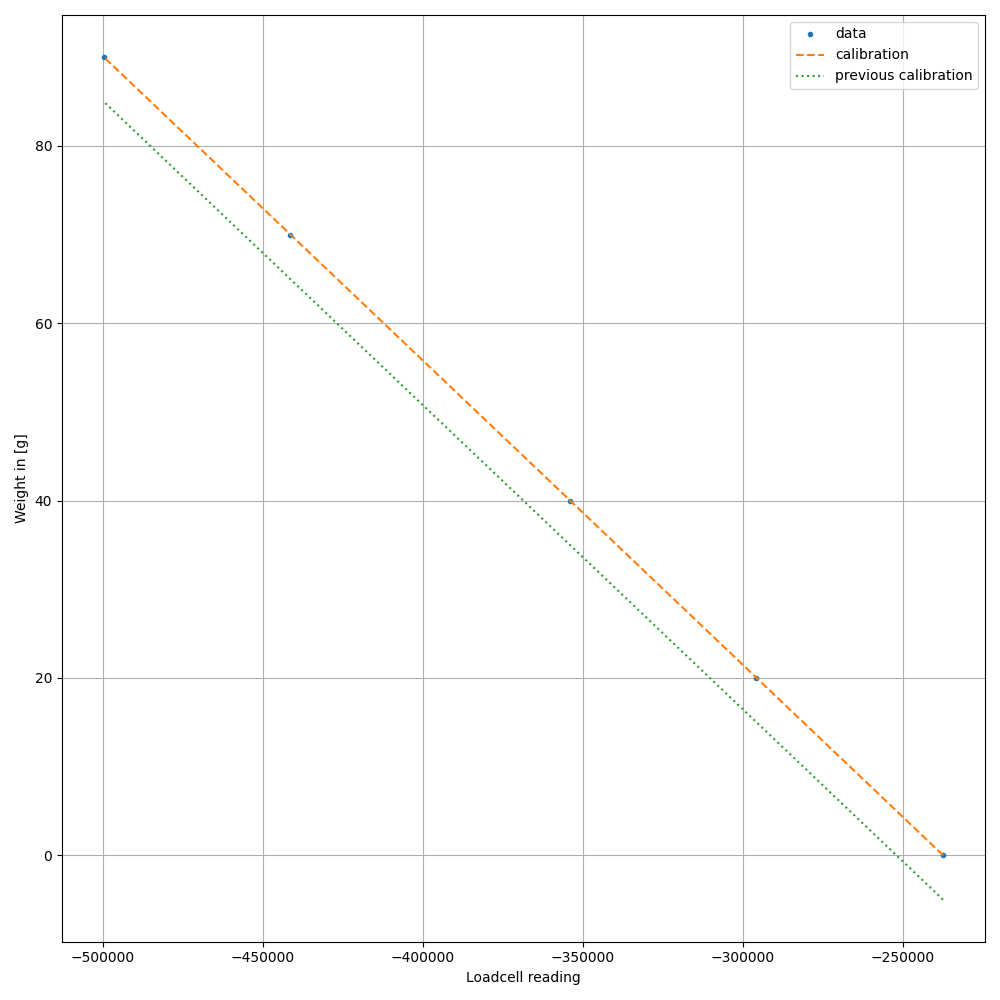
Once calibrated, thrust at different applied motor voltages was measured.
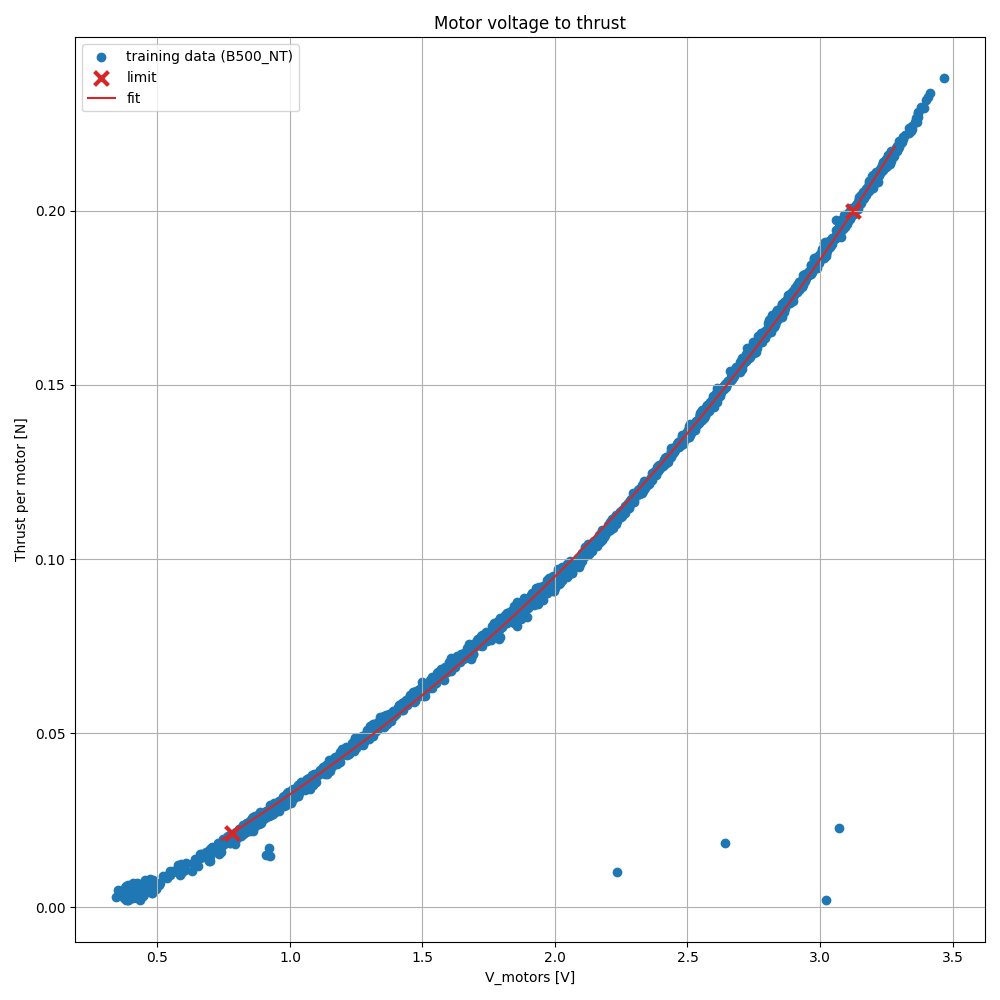
As expected, the thrust can be modeled well by a third-order polynomial in motor voltage.
Mathematically, the relationship comes from two simple facts:
- A DC motor torque is proportional to motor voltage and inversely related to motor speed.
- A propeller’s thrust scales approximately with the square of the rotational speed.
Combining these effects leads to a nonlinear (third-order) relation between motor voltage and thrust.
Battery Compensation
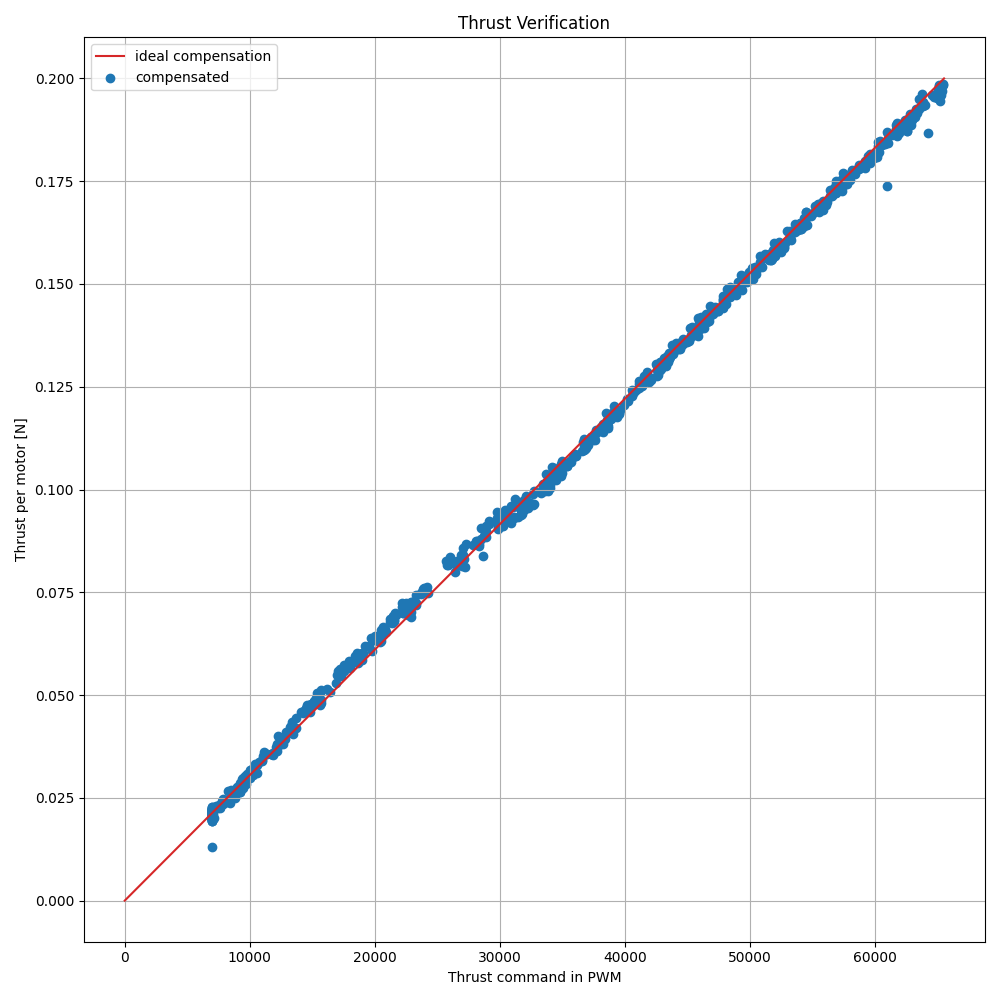
The main idea is straightforward: instead of assuming the battery voltage is constant, it is explicitly accounted for. The battery voltage is measured and then low-pass filtered to reduce noise. Together with the necessary motor voltage from the curve above, the following equation is solved for the necessary pwm to apply:
This corrected motor voltage is then fed into the third-order model to compensate the thrust command. With this compensation, the commanded-to-actual thrust relation is now approximately linear, which is exactly what is wanted. This can be verified by applying thrust commands and comparing them to the actual thrust.
Dynamic Behavior
To obtain a complete parameter set of the motors and propellers, dynamic tests were performed which included commanding rapid increases and decreases in PWM and measuring the thrust response.
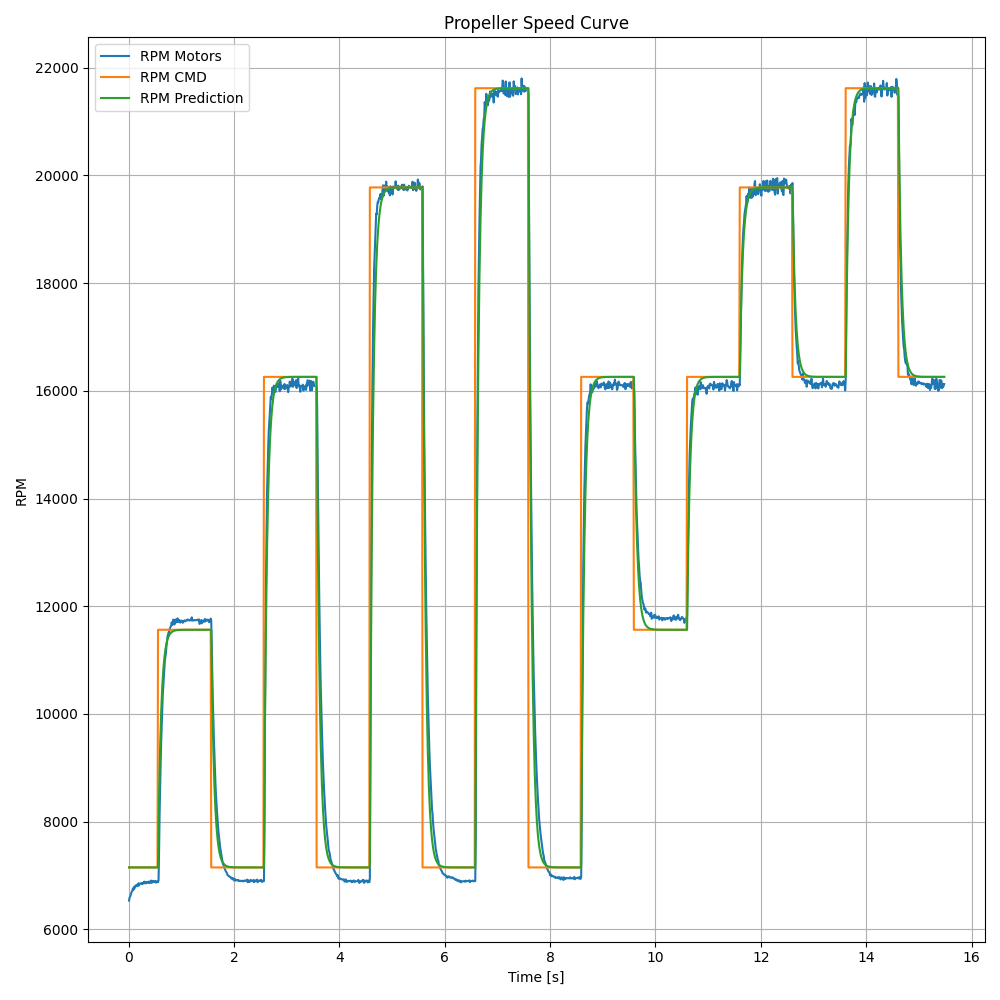
These dynamics are not required for the battery compensation itself, but they are very useful for accurate system identification and for simulation purposes.