When flying the Crazyflie Brushless, you may have noticed something familiar, as the battery drains, the drone becomes less responsive and can not generate the same amount of thrust it had at the start of the flight. This is because as the state of charge drops, the battery voltage decreases, and that directly affects the thrust output of the motors.
We wanted to fix this. In this post, we’ll explain why the old compensation method wasn’t ideal, how we used system identification to design a new battery compensation scheme, and how this improves thrust consistency across the entire battery range.
Motivation
The key problem is simple: a dropping battery voltage means a dropping thrust for the same command. This leads to flights that start crisp and responsive but is reduced as the battery drain.
Our goal was to make sure that, regardless of the state of charge, the actual thrust stays close to the commanded thrust. Though, for manual flight, sometimes this might not be preferred, so there will be an option to turn it off.
To illustrate the setup, here is a schematic of how the battery, PWM switching, and motor interact, effectively behaving like a simple buck converter:
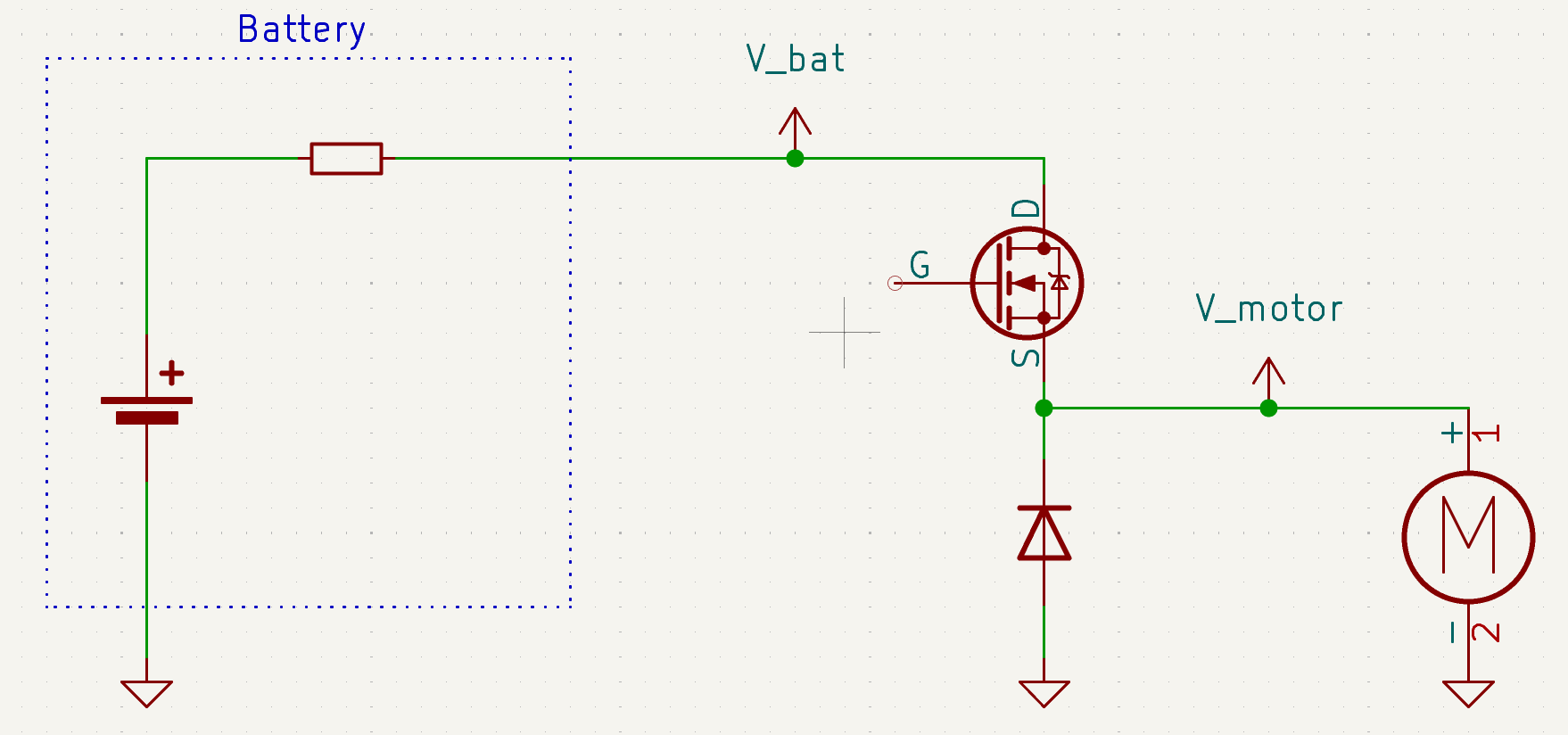
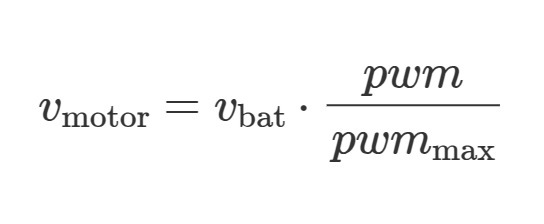
This means the motor voltage can be computed by:
System Identification
To design a proper compensation, we first needed to understand how thrust relates to motor voltage. This meant running a series of experiments on the thrust stand introduced in this earlier blog post.
The first step was calibrating the loadcell used to measure thrust:
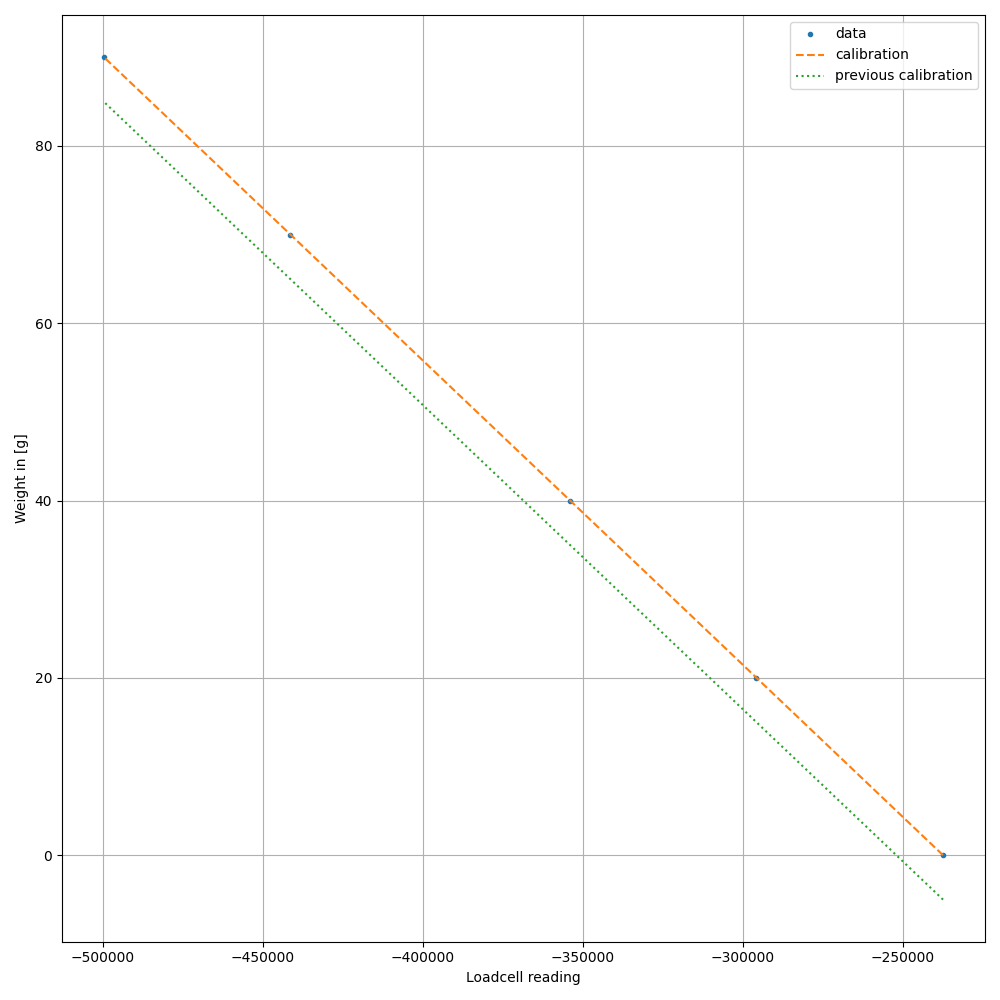
Once calibrated, we measured the thrust at different applied motor voltages.
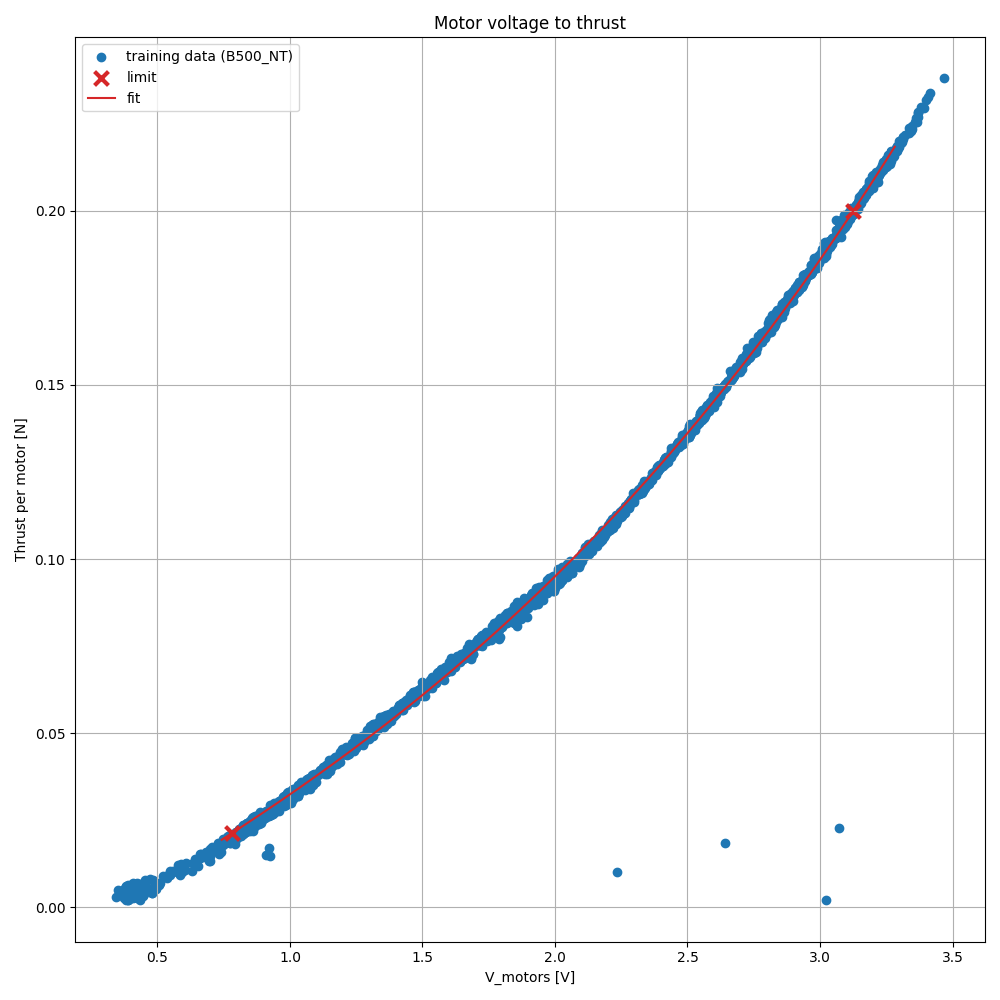
As expected, the thrust can be modeled well by a third-order polynomial in motor voltage.
Mathematically, the relationship comes from two simple facts:
- A DC motor torque is proportional to motor voltage and inversely related to motor speed.
- A propeller’s thrust scales approximately with the square of the rotational speed.
Combining these effects leads to a nonlinear (third-order) relation between motor voltage and thrust.
Battery Compensation
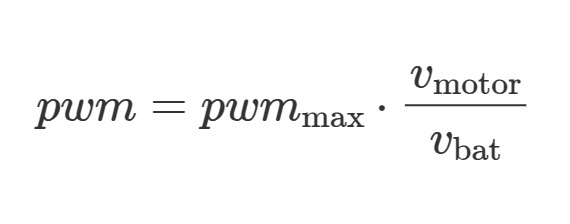
The main idea is straightforward: instead of assuming the battery voltage is constant, we explicitly account for it. We can measure the battery voltage and low-pass filter it to reduce noise. Together with the necessary motor voltage from the curve above, we can solve the equation from above for the necessary pwm to apply:
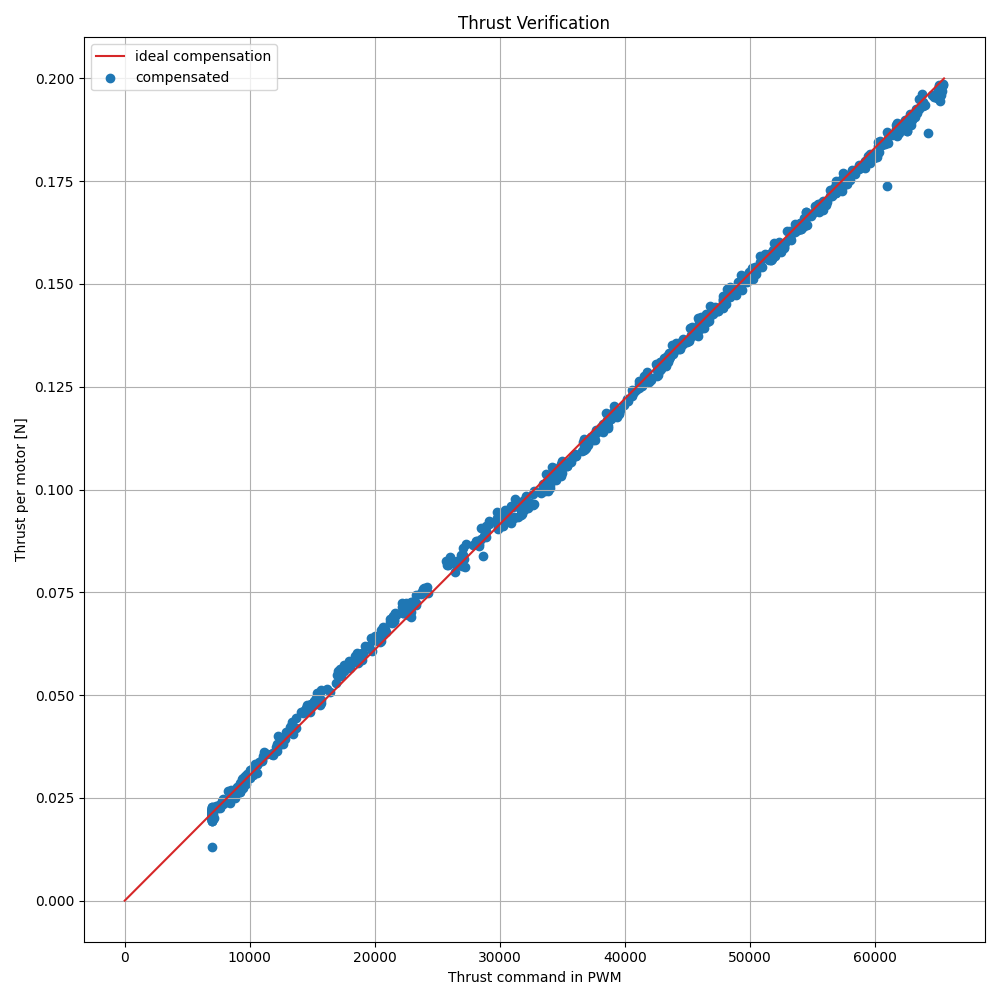
This corrected motor voltage is then fed into our third-order model to compensate the thrust command. With this compensation, the commanded-to-actual thrust relation is now approximately linear, which is exactly what we want. We can verify this by applying thrust commands and comparing them to the actual thrust.
Dynamic Behavior
To obtain a complete parameter set of the motors and propellers, we also performed dynamic tests: commanding rapid increases and decreases in PWM and measuring the thrust response.
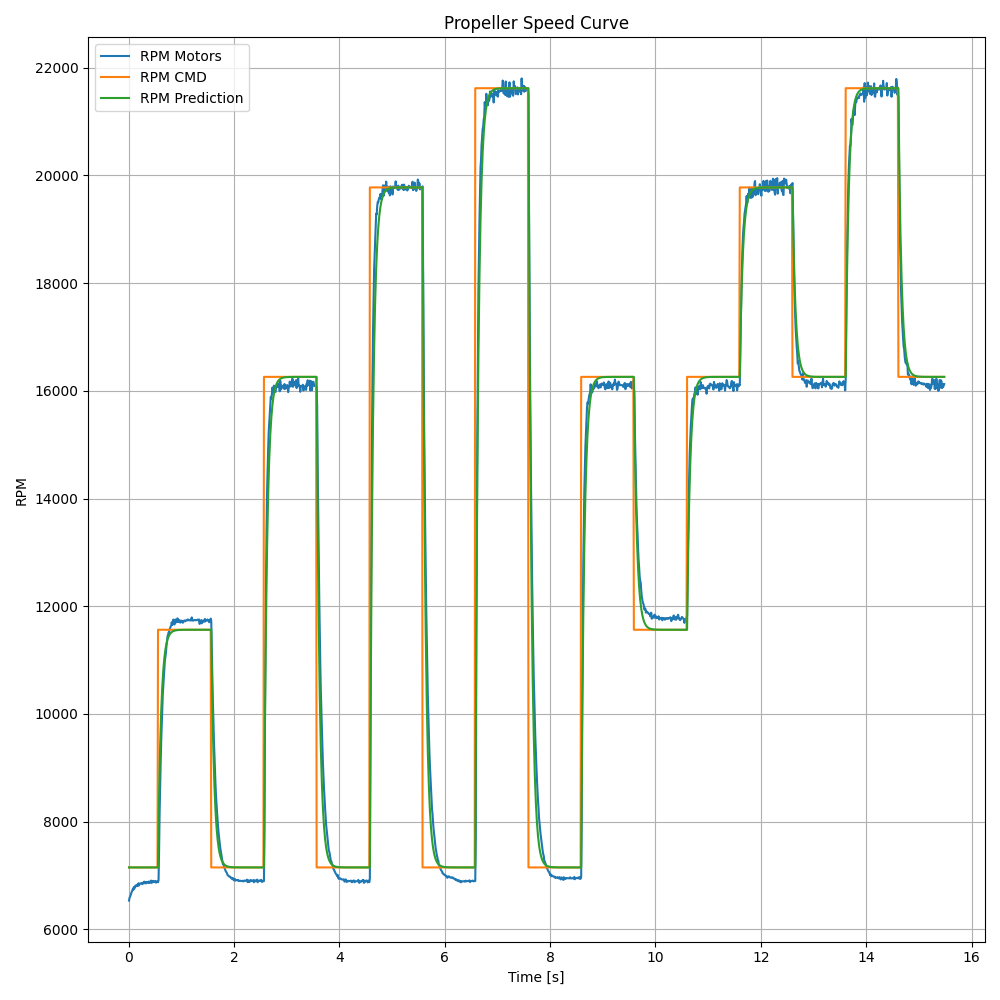
These dynamics are not required for the battery compensation itself, but they are very useful for accurate system identification and for simulation purposes.
Discussion and Conclusion
The new compensation method (#PR1526), ensures that thrust is consistent across the full range of battery charge. Compared to the old approach, it is both simpler to understand and more faithful to the actual physics of the motor–propeller system. The result is flights that feel the same at the end of the battery as at the beginning.
Beyond just improving flight performance, the system identification work also provides us with a full parameter set for the Crazyflie. We are already using these parameters in Crazyflow, our new simulation tool that models the Crazyflie dynamics with high fidelity. If you’re interested in simulation or in testing new control strategies virtually, check it out!
We’re excited to hear feedback from the community and to see what you do with this new capability.