My name is Alex, and I am thrilled to be joining the Bitcraze team as an intern!
Currently, I am a Doctoral Researcher at the Institute for Data Science in Mechanical Engineering at RWTH Aachen University, following my studies in mechatronics at TU Darmstadt. My research interests lie in swarm robotics, distributed embedded AI, and controlling technical systems using machine learning.
What drew me to Bitcraze is the unique potential of the platforms developed here; in fact, I have used them in my research for over four years now! I am eager to apply my research background to real-world hardware and finally see “behind the curtains” of the company that produces the research platform I work with daily.
I am looking forward to digging into the code, collaborating with the team, and engaging with the community. If you have any thoughts on swarm behaviors or machine learning you’d like to discuss, please reach out!
My name is Stefan, and on Wednesday the 7th of January I had the honor of joining the Bitcraze team as a software developer. I have thirteen years of experience working with robotics software in product development industry; as a developer, product owner and group manager, mainly within the areas controls, planning and sensor fusion. My vision is to bring as much of my experience into Bitcraze as possible, and have fun while doing it!
My heart has always belonged in the software development, connecting real life with control software, understanding the full chain from decisions in software to product behavior. This is especially present at Bitcraze, with small yet capable products. Understanding the entire system also lets you optimize the system as a whole, which is a complex but stimulating task. I am really looking forward to dig into this!
Going forward, I’m hoping for great collaboration, of course within the team but also with users of our products. Reach out if you have ideas, improvement suggestions or interesting projects! We are here to make your ideas fly!
With 2025 coming to a close and only a few days left on the calendar, it’s time to turn our attention forward and take a look at what we have planned for 2026. As usual, the year ahead is shaping up to be a busy one, with several long-running projects finally moving closer to release.
Projects
Our first major release of the year will be the Color LED deck, currently planned for the end of January. You can sign up here to receive an email when it’s available! This has been a long-awaited addition, and getting it out the door will allow us to fully shift focus to two larger projects that have been steadily progressing throughout 2025: Lighthouse v2 and the camera deck.
The upcoming Lighthouse v2 deck is designed to support Lighthouse systems with up to 16 base stations, significantly increasing the size of the spaces that can be covered. We made solid progress on this during 2025, both in hardware and software, and 2026 will be about pushing this work further toward a more complete and robust solution.
The camera deck is another project that has been quietly advancing behind the scenes. Several prototypes have already flown successfully, and with more dedicated time now available, we’re aiming to make meaningful progress on this front during 2026 as well. While there’s still work to be done, things are moving in the right direction.
Beyond these headline projects, we also expect to continue improving the Crazyradio 2, building on the updates from 2025 and further strengthening its performance, especially for swarm use cases.
Conferences
As is now tradition, the year will kick off with FOSDEM, where we’ll once again be present — more details on that coming soon. In late March, you’ll also find us at ERF, followed by ICRA in Vienna in early June. Conferences are always a great opportunity to meet the community, see what others are working on, and share what we’ve been building.
We’ll be sharing more information about these events — and possibly a few others — as the year unfolds, so keep an eye on the blog for updates.
Team
After a big growth spurt in 2025, the team is in a good place, but we’re not quite done yet. We still have one open position for a production QA & Embedded Engineer, and we’re looking forward to welcoming the right person to join us.
2026 is shaping up to be an exciting year, and we’re looking forward to sharing more as things develop. With that, we’d like to wish all our users, contributors, and readers a great start to 2026. We hope it will be a year full of successful experiments, smooth flights, and maybe even a few unexpected discoveries. See you in the new year!
Time flies! 2025 is already drawing to a close, and as has become a Bitcraze tradition, it’s time to pause for a moment and look back at what we’ve been up to during the year. As usual, it’s been a mix of new hardware, major software improvements, community adventures, and some changes within the team itself.
Hardware
2025 started with a bang, with the release of the Brushless! It was a big milestone for us, and it’s been incredibly exciting to see how quickly the community picked it up and started pushing it in all sorts of creative directions. From more demanding research setups to experimental control approaches, the Brushless has already proven to be a powerful new addition to the ecosystem. Alongside the Brushless, we also released a charging dock enabling the drone to charge autonomously between flights. This opened the door to longer-running experiments and led to the launch of our Infinite Flight bundle, making it easier than ever to explore continuous operation and autonomous behaviors.
Beyond new products, we spent much of the year working on two major hardware-related projects. During the first part of the year, our focus was on expanding the Lighthouse system to support up to 16 basestations. The second part of the year much of our efforts shifted toward preparing the release of the Color LED, which we’re very much looking forward to seeing in the wild.
Fun Fridays also got some extra time in the spotlight this year. Aris produced a series of truly delightful projects that reminded us all why we love experimenting with flying robots in the first place. Have you seen the disco drone, or the claw?
Software
On the software side, 2025 brought some important structural improvements. The biggest change was the introduction of a new control deck architecture; which lays the groundwork for better identification and enumeration of decks going forward. This is one of those changes that may not look flashy on the surface, but it will make life easier for both users and developers in the long run.
We also made steady progress with the Rust Lib, moving from Fun Friday to a fully-fleshed tool. It is now an integrated and supported part of our tooling, opening up new possibilities for users who want strong guarantees around safety and performance.
Another long-awaited update this year was an upgrade to the Crazyradio, improving its ability to handle large swarms of Crazyflie™ drones. This directly benefits anyone working with multi-drone setups and helps make swarm experiments more robust and scalable.
Community
It’s fair to say that 2025 was a busy year on the community and events front. We kicked things off, as usual, at FOSDEM, where we hosted a dev room for the first time! A big step for us and a great opportunity to connect with fellow open-source developers.
Later in the year, we made our first trip back to the US since the pandemic. This included sponsoring the ICUAS competition, and hosting a booth at ICRA Atlanta, both of which were fantastic opportunities to meet researchers and practitioners working with aerial robotics. We also presented a brand-new demo at HRI.
In September, KTH hosted a “Drone gymnasium“, giving students hands-on access to Crazyflies and encouraging them to explore new robotic experiences. Seeing what happens when students are given open tools and creative freedom is always inspiring, and this event was no exception.
2025 was also marked by continued and valuable community contributions. From improvements and bug fixes to features like battery compensation, these contributions play a huge role in shaping the platform and pushing it forward.
Team
Behind the scenes, Bitcraze itself continued to grow. This year brought both change and expansion within the team. Tove moved on to new adventures in Stockholm, and while we’ll miss her, we were also happy to welcome a record four new team members!
Aris ansitioned from intern to full-time developer, Fredrik then joined as a growth and partnership guru, followed by Enya as an application engineer. Hampus was the last to join us as an administrator. With these new faces, the team is larger — and stronger — than ever.
All in all, 2025 has once again been an exciting, intense, and rewarding year for Bitcraze. Thank you to everyone in the community who flew with us, built on our tools, reported issues, shared ideas, and showed us what’s possible with tiny flying robots. We can’t wait to see what 2026 brings.
Since the end of 2024, we’ve been putting effort into spreading out our manufacturing. With international trade rules rapidly changing, it felt like the right moment to expand our production footprint. Doing this helps us keep stock more stable, react faster to demand, and makes life easier for you when it comes to potential import-related costs.
To make it happen, we’ve been working closely with our long-time partner in China, Seeed Studio. They’ve been helping us move the production of some of our items to Vietnam, where exciting new opportunities have opened up. This way, we can keep the same quality and reliability you’re used to while spreading out production across more locations, which makes our supply chain stronger.
Right now, four of our products are being made in Vietnam: the Crazyflie 2.1+, the Crazyflie 2.1 Brushless, the Flow Deck, and the Crazyradio 2.0. Meanwhile, the Charging Dock is made here in Sweden, and the Lighthouse Base Station comes from Taiwan. That means our production is now spread over four different locations!
We still produce in China as well—that’s where our newest deck will come from, for example. The plan is to gradually add more products made in Vietnam, spreading production across locations, reduce risk, and keep things running smoothly for both us and you. Over time, this will make it easier to maintain stock, respond quickly to demand, and give you a smoother experience no matter where you are in the world.
We also want to make it visible where your products come from when you shop with us. In May, we updated the store to clearly display the country of origin for each item. You can now find this information at the bottom of every product page, so you always know where the item in your cart is being made. For many of you, this small detail helps plan ahead and makes it easier to estimate any extra costs from international shipping.
Bitcraze is on an exciting journey on many levels and one of them is expanding the team. In the middle of September, I started at Bitcraze. My name is Hampus, I am 33 years old and I will have a role as administrator. I live in central Malmö together with my wife Hannah and my 4 year old kid, Sigge.
After a few weeks at Bitcraze I am 100% confident I made the right choice. The company might be small, but it’s full of fun and interesting people. Everyone is helpful and share an awesome enthusiasm for the company.
My role as administrator will include many tasks. But to summarize, I will “steal” responsibilities from my colleagues, for example bookkeeping and other financial tasks, so that they can focus more on the development of the Bitcraze products.
I really enjoy administration and diving into Excel-sheets. This is not always the case for colleagues, so hopefully this means that it will be a good match between me and the rest of the company.
Besides Bitcraze, I am playing professional handball in HK Malmö at the top the Swedish division. My ambition is that my my experiences from many years of playing a team sport will help in the development of Bitcraze. I will split my time between Bitcraze and HK Malmö 50/50.
My name is Enya, and I am really excited to join the amazing team here at Bitcraze as an Application Engineer! In this role, I will get to work on a mix of fun things such as documentation, demos, usability, support and more, which is exactly the kind of variety that made me so drawn to this role.
I recently graduated with an M.Sc. in Engineering, focusing on information and communication technologies. During my education, I have specialized in interaction design and usability, which is also what I did my masters’ thesis in. While drones and robotics are still quite new to me, my background in software makes me eager to dive in and learn. The first time I came across Bitcraze I was fascinated by the technology, community, and the way this company works, and I knew right away that I wanted to be part of it. After all, getting the chance to explore the world of robotics feels like a dream opportunity for any engineer!
I’m looking forward to contributing, learning, and collaborating with all of you. Do you have ideas on how our documentation could be even more helpful? Or maybe a demo you’d love to see in action? I’d be happy to hear your thoughts!
At the beginning of the year, we released the Crazyflie 2.1 Brushless charging dock. This project was very much an experiment for us since this is the first product we are mainly manufacturing and assembling by ourselves in Sweden. We though we would write a little bit about the reason we made it that way and how it is going.
The Chaging dock is already described in a brunch of peviousblock post. It is basically a landing pad for the Crazyflie Brushless that charges the Crazyflie when landed. This is an idea and a design we have been using for years for our fair demos and that has been very useful, we would not be able to continuously fly at fair without it! Some of us even started using is on their desk to keep their Crazyflie Brushless fully charged at all time while developing with it:
However, even though it has been so useful for us, and we designed the Crazyflie Brushless to be compatible with contact-charging, we where not sure of how many people out there would want or need such a charging dock. So we decided to make it available in an experimental manner by manufacturing it by ourselves!
Why ‘made in Malmö’?
While the manufacturing we have in place for all our other products works really well, it requires a non-trivial amount of effort to start the first manufacturing batch. This is mainly due to the fact that the full mass production chain needs to be setup for the first batch and that production happens outside Bitcraze, this requires a lot of work in documentation, planning and administration.
However by doing the production in house, we are able to fix issues as they arises and to work in a much more agile way. In house production will of course no scale, but for a proof of concept it might work, this is at least what we wanted to experiment with.
There are two main improvements that has allowed us to even consider in-house experimental production: the advent of cheap and efficient PCBA services and the improvement in 3D printers reliability. This allows us to source all the parts and assemble them to make the final product.
How is a Charging Dock made?
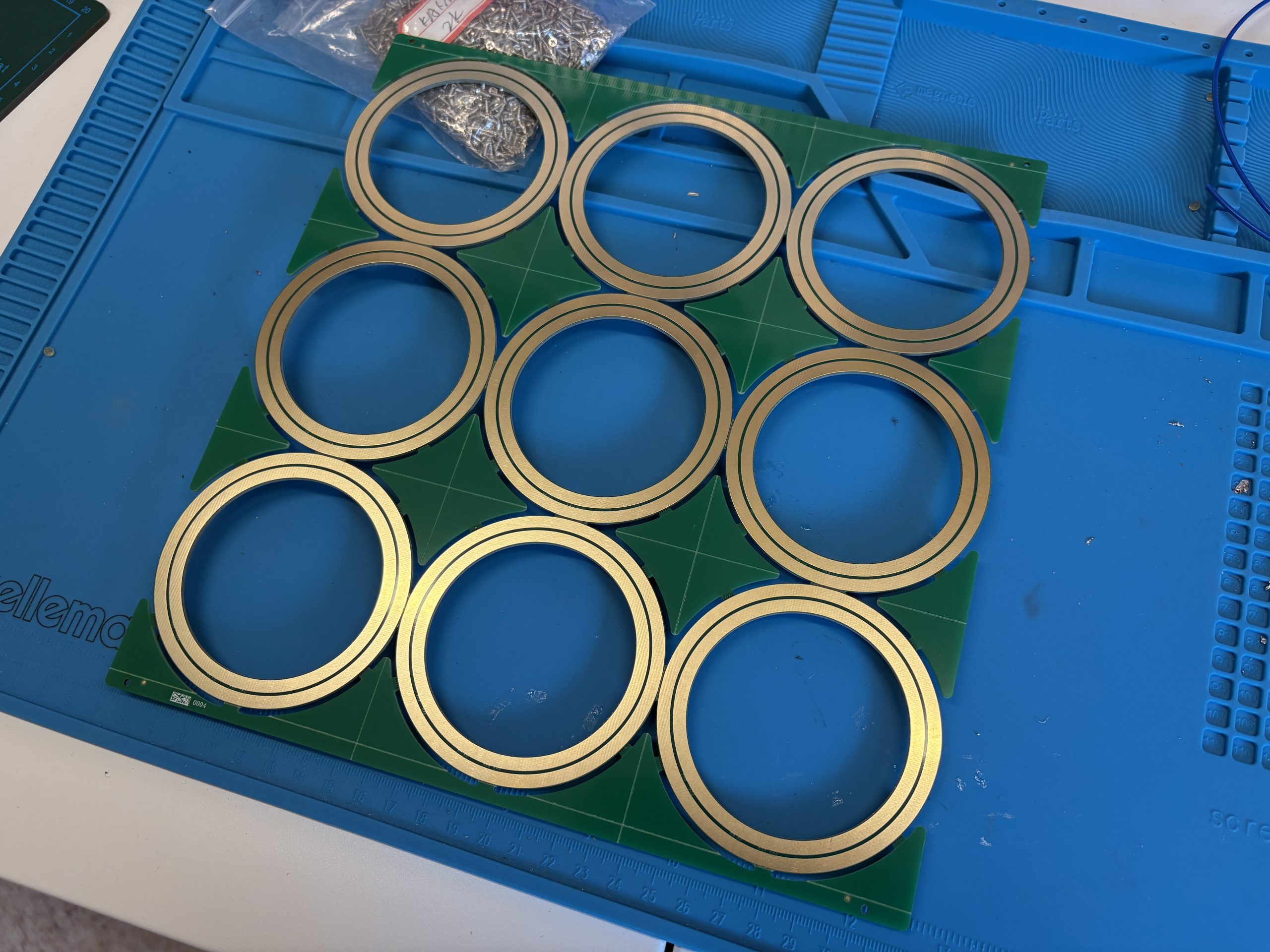
The charging dock is comprised of two main parts: the plastic landing pad and the electronic.
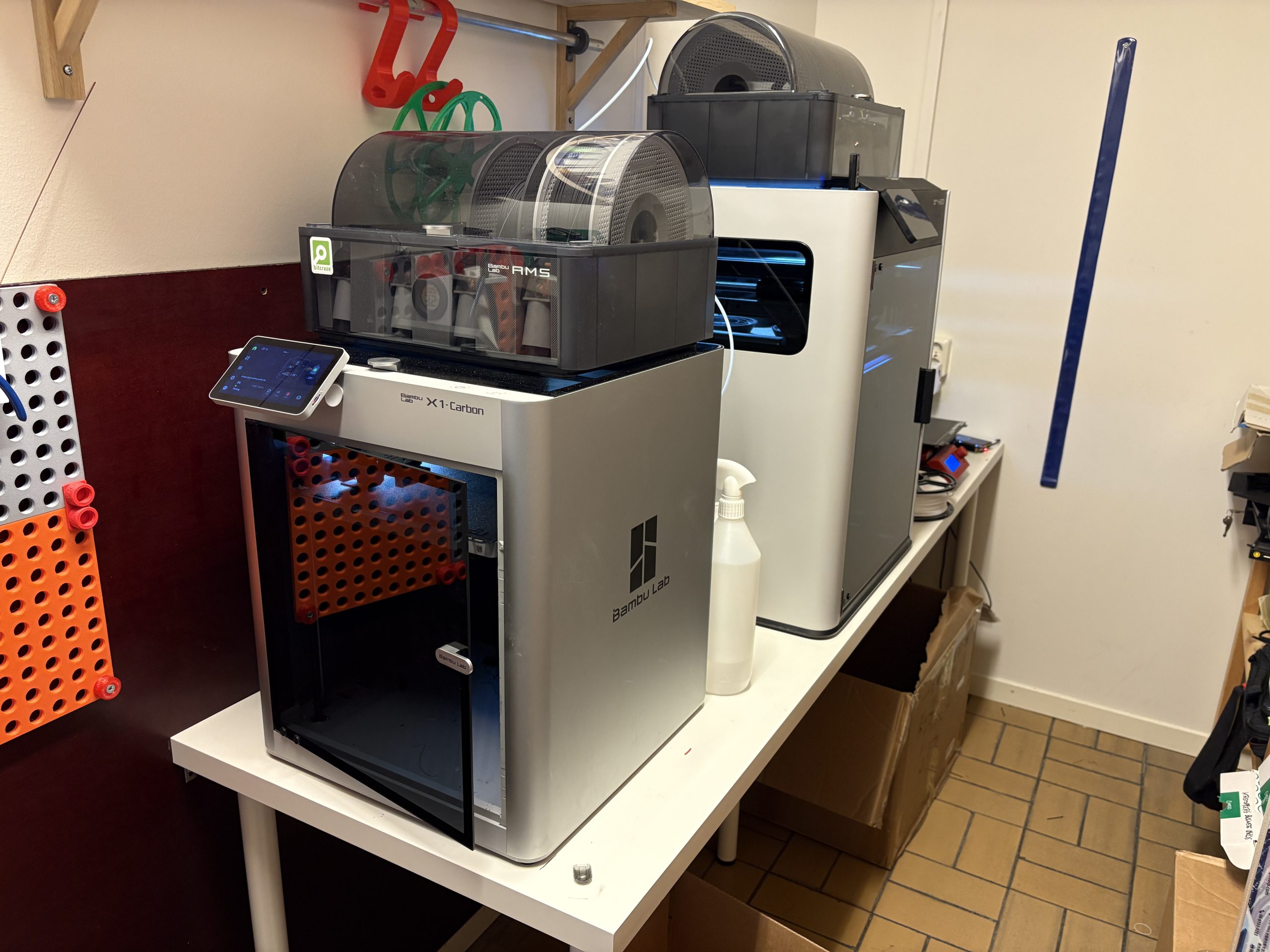
The Landing pad is 3D printed by us. We now have a mini-print-farm at the office (if a Swarm starts at 2 drones, a print farm shall start at 2 concurrently running printer :):
What made it possible for us to consider running this kind of production was when we got our Bambulab X1 carbon. It is much more reliable and most importantly easier to maintain that any printer we got before, which gave confidence that we could start making products of what we printed. We now have an H2D as well. This currently allows us to print 12 landing docks per working day.
On the electronic side, we are now able to order fully assembled PCB, and even custom cable within weeks.
All we then need is assembly and testing and we got ourselves a small production line with very little risk and a lot of flexibility.
What now?
We are very pleased with what we have achieved so far with the charging dock. The first batch is sold out and we have started manufacturing a new batch with no big pain-point in sight. At some point we will have some decision to take though: do we continue in house or transition to more traditional manufacturing? Will all the work we put so far be useful for setting up mass manufacturing or will we have to restart from zero? At what batch size or frequency will we need to transition?
However this is also one of the great advantage of this: we have full control and we can decide when to manufacture where. As we have talked a bit previously, Bitcraze is a self-organized company, and this experiment actually fits very well with our way of working and keeps us agile. We hope this can free us from the doubts we usually have when thinking about more ‘niche’ products and will allow us to try new things in the future.
Fredrik Ehrenstråle joins Bitcraze as Strategic Growth Director
Have you ever wondered what could happen if open robotics were truly accessible to everyone — researchers, educators, and innovators alike? That’s the vision that drew me to Bitcraze, and why I’m thrilled to share that I’ve joined the team as Strategic Growth Director.
Bitcraze isn’t just a technology company — it’s a community of curious, collaborative people who believe in making robotics both powerful and playful. From my very first conversation with the team, I felt the energy and integrity that set this place apart.
Over the past decade, I’ve had the privilege of working with organizations big and small, translating complex tech into real-world impact. What excites me most is helping people like you turn bold ideas into reality — whether you’re pushing the boundaries of research, inspiring students in the classroom, or building new industrial solutions.
At Bitcraze, I’ll focus on finding new ways for us to grow, building partnerships that matter, and making sure our story resonates with the people who can benefit most. But more than anything, I want to listen and learn from this amazing community.
If you’re curious about what we’re building, have thoughts on the future of robotics, or just want to swap ideas,I’d love to connect. Let’s shape what’s next together!
Hello there! I am Aris, a recent graduate from the Mechanical Engineering and Aeronautics Department at the University of Patras, Greece.
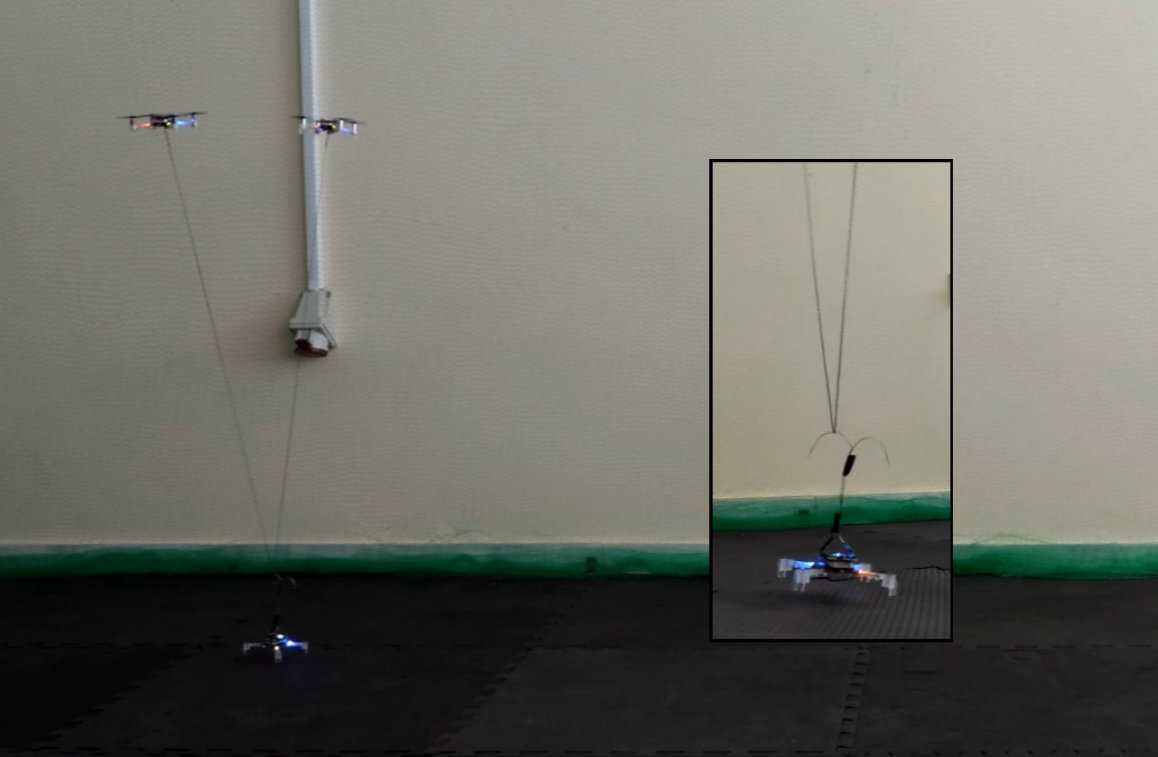
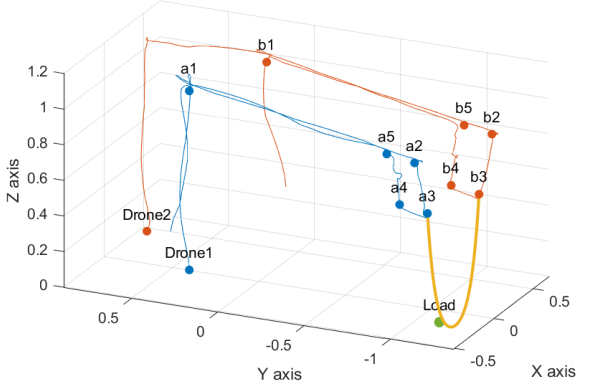
For the last couple of years, as a member of the Robotics Group at the University of Patras, I have been working with Bitcraze products, including the Crazyflie 2.1 and the Lighthouse Positioning System, exploring swarming scenarios. In my diploma thesis I investigated the autonomous transportation of an object by a swarm of two rope-tethered quadcopters, where the introduced path planning algorithm enables the swarm to approach, grasp, lift and transport the load.
The swarm grasping the load. Trajectories Simulation
I’m excited to join Bitcraze as part of the team, where I can further develop my skills and gain valuable work experience. My principal objective is to improve the Lighthouse Positioning System and contribute to the development of a new solution for tracking in larger volumes. During this time, I look forward to deepen my knowledge on Bitcraze’s products and learn how they apply in real-world applications.