Flying formations with a swarm is always fun to develop and watch, but it is also a great way to stress-test the software behind it. As part of the development of cflib2, we put it through one of its toughest tests yet: flying 49 Crazyflies in coordinated formations.
The entire swarm was controlled using a single Crazyradio 2.0, highlighting the combined improvements in cflib2 and Crazyradio firmware over the past few months.
The setup
The hardware configuration was relatively straightforward. We used 49 Crazyflie 2.1 Brushless drones, each one equipped with a bottom-mounted Color LED deck for vivid lighting effects. For positioning, we used the Lighthouse positioning system, covering the entire flight area, which was roughly 5x5x2m. Its accuracy allowed the Crazyflies to fly grid formations with just 0.4m spacing between them.
One of the big practical challenges when managing a large swarm is swapping the depleted batteries for charged ones. Thanks to the Crazyflie 2.1 Brushless PCB design, each drone can now charge while sitting on its charging dock, making it much easier to prepare the swarm for the next flight.
Flying the formations
The swarm performed a sequence of synchronized formations under the control of a central PC. Rather than streaming the full trajectories to every drone, the formations are built using the Crazyflie’s High-Level Commander. Each Crazyflie receives simple motion commands such as go to or spiral, and executes the corresponding trajectory onboard. At the same time, it receives commands for changing the color of the Color LED deck.
Using cflib2, these commands can be sent to all 49 Crazyflies through a singe Crazyradio 2.0, which was not possible with cflib.
Looking ahead
This demonstration is an exciting milestone for cflib2 and showcases what the new library makes possible. While controlling 49 Crazyflies is an impressive demonstration, cflib2 is designed to benefit projects of every size. Whether you are flying a single Crazyflie or coordinating a large swarm, the goal is to provide a faster, more scalable, and more robust communication library.
Most of the functionalities from cflib have already been migrated to cflib2, and development is continuing. For many applications, cflib2 is already ready to use, so if you would like to try it out, you can find the repository here.
The Crazyflie 2.1 Brushless uses the DSHOT protocol to command its ESCs — a clean, digital, CRC-protected signal that replaced the old analog PWM signals. But until now, that communication was strictly one-way: the firmware sends a throttle command and hopes for the best. There’s no direct feedback from the motors about what they’re actually doing, even if the brushless motors are naturally able to do that by sensing the back-EMF on their windings.
This matters more than it might seem. The relationship between a commanded throttle value and the actual motor RPM is nonlinear and varies with battery voltage, temperature, and load. For anything beyond basic hovering — system identification, simulation validation, advanced controllers — you want to know the actual motor speed, not just what you asked for. Previously, measuring RPM required external instrumentation, such as an optical tachometer or a thrust stand. Useful on the bench, but impractical in flight.
As part of our recent work at IDSIA on nonlinear system identification for the Crazyflie 2.1 Brushless, we developed a new bidirectional DSHOT driver to change this. Each ESC now reports its electrical RPM back over the same signal line used for commands, giving us per-motor RPM telemetry at every control cycle. The new driver was just merged in the firmware and it’s now available for everyone to use (PR #1556).
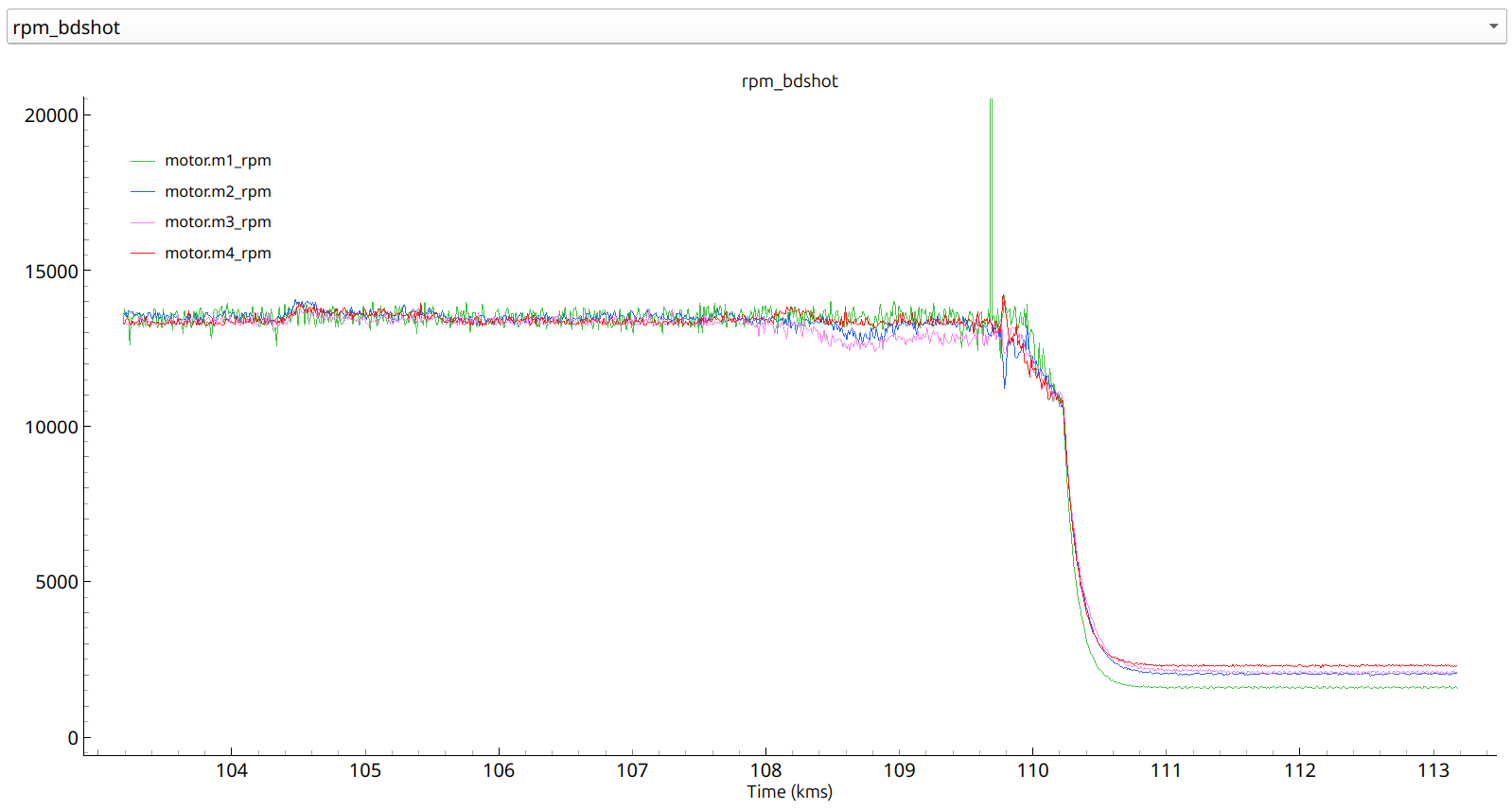
Plot showing RPM measurements during hover and landing
What is Bidirectional DSHOT?
Standard DSHOT encodes a throttle command as a sequence of bit periods on a digital line: each bit is either a short or a long pulse, with the full frame containing an 11-bit throttle value, a telemetry request flag, and a 4-bit CRC. It’s fast, noise-resistant, and needs no calibration. In other words, a major step up from the analog PWM for the old Crazyflie 2.1 Brushed.
Bidirectional DSHOT extends this with a simple trick. After the flight controller finishes transmitting a command frame, it releases the line (sets the GPIO to input). The ESC responds with a telemetry packet containing its current electrical RPM (eRPM), encoded using a GCR (Group Code Recording) scheme. The whole exchange, i.e., command out, telemetry back, takes roughly 150 µs. To enable bidirectional mode, the STM32 inverts the polarity of the DSHOT line (idle-high instead of idle-low), which the ESC recognises as a request to reply with telemetry.
The eRPM value from the ESC reports electrical rotations. To get the mechanical RPM that actually matters, you divide by half the number of motor poles: RPM = eRPM / (poles / 2). For the motors on the Crazyflie Brushless, this is 12 poles per motor, but the driver can be customized with a fixed constant set at build time.
This protocol is well-established in the FPV and Betaflight ecosystem, where it’s used for RPM filtering in flight controllers. The ESC firmware on the Crazyflie Brushless (BlueJay) already supports it. The missing piece and technical challenge was the firmware on the STM32 side.
Logic analyser captures of the standard and bidirectional DSHOT exchanges. In bidirectional DSHOT the command frame is followed by the GCR-encoded telemetry response.
Implementation
Bidirectional DSHOT turns a transmit-only interface into a half-duplex one: the same physical line must alternate between output (command) and input (telemetry). On the Crazyflie’s STM32, implementing this must account for a few hardware constraints.
DMA Input Capture for receiving telemetry
Rather than polling or bit-banging the telemetry response, the firmware uses DMA Input Capture: it configures the timer to record a timestamp at every edge transition on the DSHOT line, with DMA transferring each timestamp to a buffer without CPU intervention. After the command frame is sent, the code opens a 100 µs receive window (accounting for 30 µs of wait time, around 50 µs for the telemetry packet, plus some headroom). Once the window closes, the buffer contains a sequence of edge timestamps that can be decoded into the GCR telemetry frame at leisure.
This is the same approach used in Betaflight’s bidirectional DSHOT implementation, adapted to the Crazyflie’s timer and DMA configuration.
Hardware conflicts
All four motor DSHOT outputs share the TIM2 timer on the STM32. This was not an issue with traditional DSHOT: the timer is left free-running, and each motor can be controlled independently. With bidirectional DSHOT, the transmit and receive phases require different timer periods (the command and telemetry frames have different bit rates), so the transmit and receive phases can’t overlap between motors.
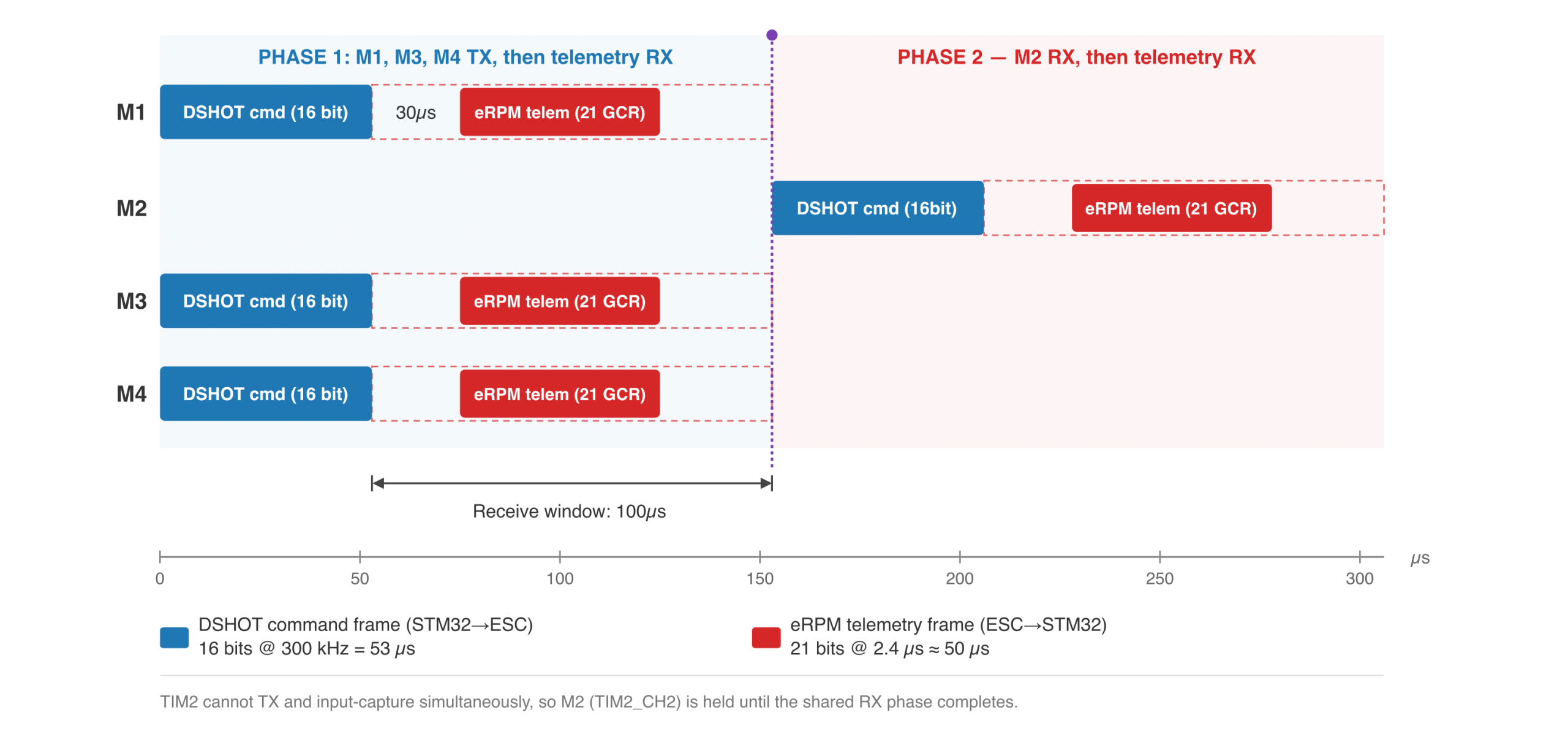
The solution is a two-phase scheme within each control cycle:
Phase 1: Transmit command frames to motors M1, M3, and M4. After transmission, switch the lines to input and capture their telemetry replies.
Phase 2: Once the receive window closes (detected by a TIM2 interrupt), transmit the command to M2 and capture its reply.
This sequencing means M2’s command is delayed by roughly 100 µs relative to the other motors — the cost of sharing a single timer. In practice, at the Crazyflie’s control rate, this additional latency is negligible.
What you get
With bidirectional DSHOT enabled, the firmware exposes four new log variables:
motor.m1_rpm
motor.m2_rpm
motor.m3_rpm
motor.m4_rpm
These can be streamed and recorded through cfclient like any other log variable, at the full control loop rate.
Validation
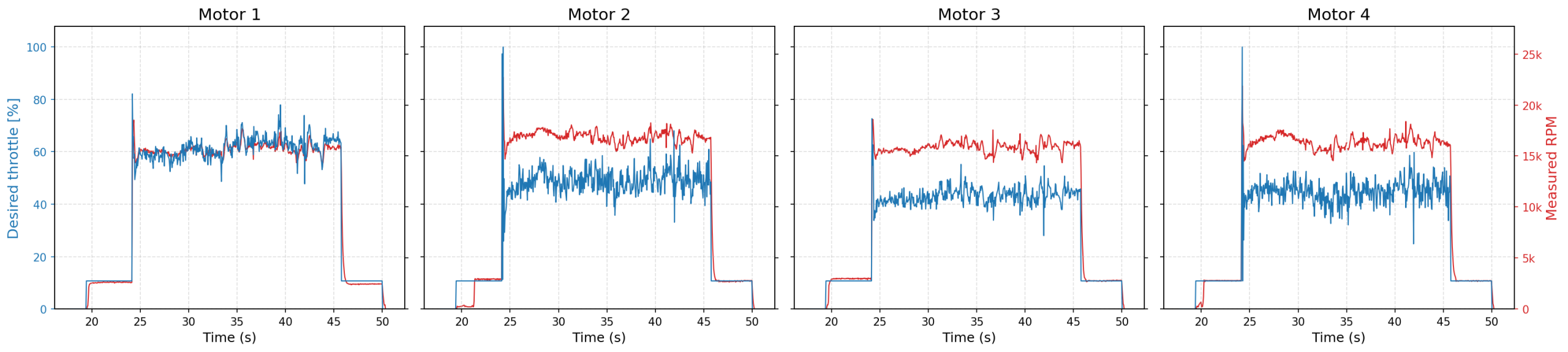
Desired throttle vs. measured RPMs over a 30s flight.
To verify that the telemetry readings are correct, we compared the reported RPM values against the thrust-stand characterisation performed for the battery compensation work. At a given commanded thrust and battery voltage, the expected RPM can be computed from the motor voltage–thrust polynomial and the motor’s known Kv constant. The onboard RPM readings match this prediction well across the operating range.
During flight, the RPM traces clearly show the motor dynamics that the open-loop command model doesn’t capture: spin-up and spin-down transients, asymmetries between motors, and the RPM dips that correspond to aggressive attitude changes. This is exactly the kind of information that was previously invisible to the firmware.
Applications
Per-motor RPM telemetry opens the door to several applications.
System identification with measured actuator signals
RPM telemetry changes what’s possible for system identification. In previous nano-drone datasets, the “motor input” is the commanded PWM or throttle value — but the actual motor response differs from the command due to ESC dynamics, battery sag, and nonlinear torque curves. Any model trained on commanded inputs cannot disentangle these actuation nonlinearities from the airframe dynamics it’s actually trying to capture.
This is exactly the problem we addressed in Busetto et al. (2025): we released a benchmark for nonlinear system identification based on the Crazyflie 2.1 Brushless. The dataset contains 75k real-world samples across four aggressive flight trajectories, with synchronised 4-dimensional motor RPM inputs and 13-dimensional output measurements (IMU + motion capture). Crucially, the motor inputs are measured RPMs from bidirectional DSHOT — not commanded values. This cleanly separates the actuation subsystem from the airframe dynamics, giving identification algorithms a much better signal to work with.
The benchmark includes multi-horizon prediction metrics for evaluating both one-step and multi-step error propagation, along with baseline models ranging from physics-based to neural network approaches. All data, scripts, and reference implementations are open-source at github.com/idsia-robotics/nanodrone-sysid-benchmark. The firmware feature described in this post directly enabled this data collection.
Closed-loop RPM control
Beyond identification, using RPM telemetry as closed-loop feedback enables new opportunities in control. The battery compensation scheme introduced in PR #1526 solves the voltage-sag problem by adjusting the PWM command based on measured battery voltage and a motor voltage–thrust polynomial. It works well, but it’s fundamentally still open-loop with respect to the motor itself: the firmware corrects for the expected effect of voltage on thrust, without ever checking whether the motor actually reached the intended speed.
With RPM feedback, a different approach becomes possible: close the loop at the motor level. Instead of commanding a PWM duty cycle and compensating for voltage, command a target RPM and let a per-motor controller (or the ESC’s own closed-loop mode) handle the rest. This makes the thrust response inherently invariant to battery voltage, temperature drift, and propeller wear — anything that shifts the relationship between PWM and actual speed.
Broader impact
Having RPM as a standard logged variable on an open-source, commercially available nano-drone lowers the barrier for the entire research community. Anyone with a Crazyflie Brushless can now collect flight dynamics datasets with true actuator measurements, validate sim-to-real transfer (e.g., with Crazyflow), or prototype RPM-aware controllers — without any hardware modifications.
Try It
Bidirectional DSHOT is available today and enabled by default in the main branch of the Crazyflie firmware. To use it:
You need a Crazyflie 2.1 Brushless with BlueJay ESCs (the stock configuration).
Log the motor.m{1,2,3,4}_rpm variables through cfclient.
It is also used by the supervisor to check that all motors has spun up during arming or if a motor is blocked during flight. We’re looking forward to community feedback. Let us know how it works for you.
If you’ve ever gone looking for a more advanced, or use-case-specific Crazyflie example (something beyond the basic single-feature ones), you’ve probably ended up digging through the cflib and crazyflie-firmware example folders. That’s about to change.
We’ve created a new repository: crazyflie-demos. It’s a dedicated place where both us at Bitcraze and the broader community can host self-contained, well-described Crazyflie demos.
Why a new repository?
The examples in the core Bitcraze repositories were meant to be kept focused: demonstrating one feature, one API, or one subsystem at a time. But real demos tend to grow beyond that pretty quickly. Once you start combining positioning systems, swarming, custom firmware apps, external sensors, or other integrations, things stop fitting naturally into the firmware or library repos.
crazyflie-demos gives those larger, more practical examples a proper home, and finally provides a good answer to the question: “where should I put this cool thing I built?”
Why not just a folder of examples?
We want to avoid the fate of some older example collections that gradually turned into an unmaintained pile of half-working demos and missing context.
The goal with crazyflie-demos is that every demo should be properly documented and actually runnable. That means clear descriptions, listed dependencies, and enough context to understand what’s going on without digging through source code for an hour.
Another important part is reproducibility: each demo is self-contained and uses pinned dependencies, so an example you clone two years from now should still work.
What’s in there already?
The repository is organized by demo type:
scripts/cflib: Host-side Python scripts using crazyflie-lib-python, covering the full Crazyflie API.
scripts/rust: Rust demos using crazyflie-lib-rs, showcasing its high-performance and native async support.
scripts/cflib2: Early demos for our new Python library, crazyflie-lib-python-v2, built on top of the Rust library. cflib2 doesn’t have a release yet, but we’re already writing demos for it to test the API and the performance.
firmware: Out-of-tree firmware apps that are flashed directly to the Crazyflie. Each demo carries its own crazyflie-firmware submodule so you’re always building against the right version.
hybrid: Demos that combine onboard firmware with a host-side script working together.
A place to share your work
A big motivation behind crazyflie-demos is making it easier to share work with the community.
If you’ve built something useful, or just a fun experiment using our products, this is the place for it. Not everything needs to live in its own repository or branch. A well-described demo here makes it easier for others to find, understand, and build on your work, and most importantly, to get inspired by it.
We’ll also be using this repository as the go-to reference whenever people ask for more use-case-specific examples, so good demos here will naturally help more people discover what’s possible with the Crazyflie ecosystem.
We’re happy to announce that release 2026.04 is now available. This update introduces a dedicated CRTP port for the supervisor subsystem and a radio startup gate for more reliable early connections, along with a number of smaller bug fixes and quality-of-life improvements. Alongside the release, we’re launching a new crazyflie-demos repository with self-contained examples demonstrating real-world use cases. Thanks to our community contributors for their valuable additions to this release.
Major changes
Demos repository The new dedicated crazyflie-demos repository hosts more complex examples that combine features or subsystems to demonstrate best practices and real-world use cases. Every demo in the new repository is self-contained, with pinned software versions.
CRTP supervisor port A new dedicated CRTP port provides direct access to the supervisor subsystem, consolidating supervisor-related commands that had historically ended up on unrelated ports. Arming, crash recovery, and emergency stop commands now go through this port instead of being spread across the platform and localization ports. The old ports still accept these commands for backward compatibility. The new port also exposes supervisor state (armed, flying, tumbled, crashed, etc.) through a direct query, so clients no longer need to set up a log block just to check supervisor status.
Radio startup gate The STM32 now signals the nRF51 when it’s ready to receive radio packets. Previously, if a client connected during boot, packets could arrive before the firmware was ready to handle them, causing lockups.
Lighthouse calibration saving fix Fixed a bug that made saving lighthouse calibrations unreliable: a signature mismatch in a memory-read failure callback could leave the memory subsystem locked, blocking further reads until reconnect.
AI coding agents have become increasingly useful lately. The main reason, as far as I can understand, is that agents like Claude Code can close the loop: they can produce code, test it, and iterate. This is critical because models will make mistakes, and the feedback loop allows them to iteratively correct problems and usually converge on a working solution.
When trying to use coding agents with embedded systems, I quickly found myself becoming a manual tester, copy-pasting logs and describing behavior back to the agent. I was the one closing the loop, which is both inefficient and frustrating. So I started looking for ways to improve that.
Control by CLI
One of the great strengths of coding agents is that they can close the loop through the command line. They can invoke CLI tools, and by assembling them together they can achieve far more than any single tool would allow, this is essentially the Unix philosophy applied to AI-assisted development.
The most effective way to extend an agent’s capabilities that I’ve found so far is to build dedicated command line tools and let the agent use them. I ran a couple of experiments with dev boards where I had the agent create a small Python tool to control the board. The minimum useful functionality was: flash firmware, observe the console output, and reset the board. With just those three capabilities, the agent gains the ability to iterate almost entirely on its own.
The crazyflie-agent-cli
This is where the idea came from for creating such a tool for the Crazyflie. I chose to write it in Rust, partly to exercise our newly developed Crazyflie Rust library.
The capabilities I gave it are:
Flash the Crazyflie using the bootloader
Reset the Crazyflie into bootloader or firmware mode
Console, stream the debug text output from the firmware
Parameters, read and write parameter values
Log variables, stream the value of log variables
This is roughly the minimum viable feature set for Crazyflie firmware development. Since AI coding agents already know how to write C code and compile projects, this is, in theory, enough to close the loop and let an agent implement new functionality, flash it, observe the behavior, find a bug, and iterate, just like in a normal development workflow.
Designing a CLI for agents, not humans
One design challenge worth mentioning: the Crazyflie communication model is inherently stateful. As a human, you would open an interactive client, connect to the drone, and then poke around, reading parameters, watching log variables, tweaking things live. That interactive, session-based workflow doesn’t translate well to agents, which can’t use interactive CLIs. Instead, the crazyflie-agent-cli uses a daemon/client architecture: the agent first launches a background daemon that establishes the radio connection, then uses separate one-shot commands to interact with the already-connected Crazyflie. It’s not the most ergonomic design for humans, you end up needing two terminals, but it turns out to work surprisingly well for an agent, which has no trouble managing background processes and firing off commands independently.
Putting it all together
The CLI gives the agent the capability to interact with the Crazyflie, but it also needs to know how to use it. We could tell the agent at the start of every session “here is a tool you can use,” and it would figure things out by calling --help. But a much more efficient approach is to use skills.
Alongside the CLI, I created a skill that teaches the agent how to use the tool for Crazyflie firmware development: what the workflow looks like, how to flash, how to debug. This is what truly closes the loop, once the skill is in place, the agent knows what a Crazyflie is, how to flash it, and how to debug it, without needing much guidance.
The end result: Claude Code can implement simple firmware functionality largely in one shot, and even when it doesn’t get it right the first time, it will iterate and generally get there.
Here is an example prompt that works end-to-end:
I have a Crazyflie on channel 80, 2M, default address. Add a log variable that exposes
the free heap size so I can monitor it over time. Build, flash, and verify the new
variable appears in the log list.Code language:PHP(php)
After a little while, the Crazyflie has been flashed, functionality has been verified and result looks something like:
Conclusion
This tool is not an official Bitcraze product, it’s a Fun Friday project. But we think it’s a nice demonstration of what is becoming possible with AI coding agents. By closing the loop, we can start to accelerate firmware development the same way AI has already accelerated other kinds of software development. That said, this is a force multiplier, not a replacement for engineering judgment. The human still needs to be in the loop.
For instance, I believe this CLI is already capable enough to let an agent bring up a new deck with a new sensor, exactly the kind of scoped, iterative task where the available functionality is sufficient. The tool could certainly be improved with more features, and we’ll see how much that happens. But we expect it will likely find its way into some of our day-to-day Crazyflie work at Bitcraze.
For the time being, treat it as an experiment and an example, not a finished product. The code is on GitHub at ataffanel/crazyflie-agent-cli if you want to try it out.
This week we wanted to reflect on the progress that has been made lately in the Crazyflie ecosystem which will lead to bigger and better Crazyflie Swarms.
Radio communication
Like pointed out in the last blog post about Building a Crazyflie Flower Swarm with Rust, the new Rust Crazyflie library together with the new Crazyradio 2.0 has improved connection time and link efficiency by quite a bit.
It is now possible to connect swarms of multiple dozens of Crazyflies in seconds using a single radio and then make them fly while still getting position telemetry. So many Crazyflie on one radio does limit the maximum bandwidth per Crazyflie, but it does now work in a stable way!
Color LED deck
The recently released Color LED deck is a great addition to the ecosystem towards swarm. Its predecessor, the Led-ring Deck, has been used a lot by researchers to indicate state of individual Crazyflies in a Swarm. The Color LED Deck improves on that by providing a diffuser that allows to see the color from the side. This allows to mark states of big groups of Crazyflie much more clearly.
As a bonus, the Color LED Deck is very usable in other field like art and shows since it is much more visible and can be used to fly Crazyflies as “Flying Pixels”.
Autonomous landing and charging
Last year, we have released a Crazyflie 2.1 Brushless charging dock. This is a produced version of an idea we have been using with Crazyflie 2.1 and the Qi deck for years at fairs and conferences. It allows Crazyflies to autonomously land and charge. It is not only great for autonomous drone demos and shows but it also is a great waiting spots for swarms when doing research: the charging dock keeps the swarm charged so that when it is time to take off all the individuals starts with the same battery level.
Future endeavors
On the radio side there are still areas that would bring great improvement on communication stability. We are for example working on a channel-hopping communication protocol that should make the connection mostly immune to regular interference on 2.4GHz.
We are also working at improving other parts of swarm management, this includes for example solving the problem of flashing a full swarm of Crazyflie with the same firmware: we may be able to use broadcast messages more in order to drastically speed up the process instead of flashing the Crazyflie one per one.
Overall, working on bigger swarms allows us to work on the full stack and to make the Crazyflie a better drone for everybody.
Today, we welcome our first blog post by Maurice Zemp. Stay tuned for more of his adventures later!
When I started working on my Matura thesis (a mandatory project in Swiss High School), I wanted to create something that went beyond a purely theoretical project. I was fascinated by the idea of combining cutting-edge technology with a very tangible and exciting challenge: making a small drone fly through a racing course, composed by small gates, completely on its own and as fast as possible. Inspired by the work under Prof. Davide Scaramuzza, I set off for a challenge to find some new alternatives or improvements, while developping my approach from scratch.
What may sound simple at first quickly turns into a highly complex task. A drone needs to perceive its environment, process information in real time, and decide on precise actions within fractions of a second, all without human intervention. Professional drone racing pilots train for years to master this level of control. My goal was to see whether artificial intelligence could achieve something similar, using reinforcement learning as the core technique.
But there was another challenge: I wanted to design a system that wasn’t only powerful, but also affordable and reproducible. Many research institutions use equipment worth tens of thousands of francs for projects like these. I asked myself: Could I build something comparable with a fraction of the budget, and still push the boundaries of what’s possible?
That question became the driving force behind my project, which later brought me all the way to the finals of Schweizer Jugend forscht (short SJf) and saved me a place as the main prize to represent Switzerland at the world’s biggest Youth Science Competition, ISEF 2026. Over the following sections, I’ll share how I built my system step by step, what it was like to present it at the competition, and how it felt when all the effort finally paid off.
Fig. 1: Me with the Crazyflie 2.1 Brushless in the halls of ETH Zurich, where the main event of SJf took place.
Motivation and Objectives
The project I presented at Schweizer Jugend forscht was the result of my Matura thesis, in which I set out to combine my interests in drones, programming, and artificial intelligence. My goal was to develop a complete system for autonomous drone racing, based on Reinforcement Learning (RL), that would not only work in simulation but could also be transferred to real-world conditions.
To achieve this, I focused on three key aspects:
Building a highly efficient simulation environment for training a reinforcement learning agent.
Developing a cost-effective motion-capture system (MoCap) capable of tracking a drone’s position and orientation in real time with high precision.
Integrating both systems in a way that would allow seamless transfer from simulation to real-world experiments with minimal latency.
This combination made the project unique: instead of relying on expensive commercial hardware, I set out to create a solution that would be precise and affordable but still continue the state-of-the-art development in Drone Racing.
Simulation Environment
The simulation was implemented in Python, using Stable Baselines, OpenAI Gymnasium, and NumPy, accelerated with Numba for performance. At its core, the system employed the Proximal Policy Optimization (PPO) algorithm, a state-of-the-art reinforcement learning algorithm known for stability and efficiency.
Unlike general-purpose simulators such as Gazebo, my environment was designed specifically for drone racing. It could process tens of thousands of interactions per second, enabling a training run of a few dozen minutes to correspond to nearly a year of simulated flight time.
Key features included:
A physics-based flight dynamics model accounting for thrust, drag and gyroscopic effects.
A carefully engineered reward function balancing speed, precision and avoiding shortcuts.
A flexible design that allowed different gate sequences and drone parameters to be tested.
A multi-agent environment computing on multiple threads, leading to much shorter training time needed.
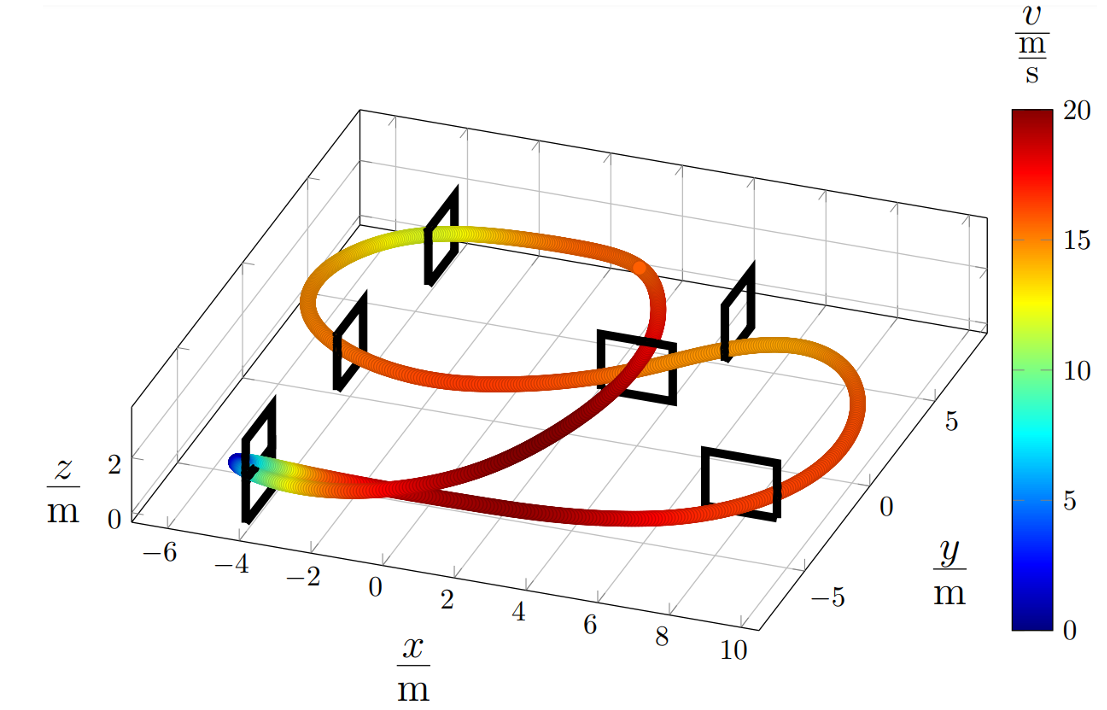
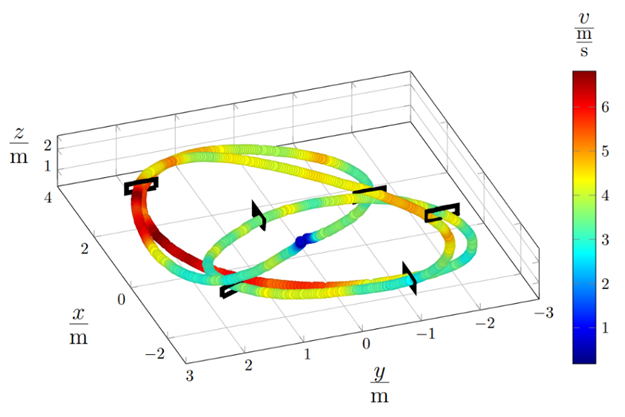
Fig. 2: Path of the drone after two hours of training on a given track
With this setup, an RL agent could learn to complete arbitrary racing tracks in near-optimal time1 after only a few hours of training. In simulation, top speeds of up to 100 km/h were achieved, though these exceeded the physical limits of the real drone and were generated with modified drone parameters.
Motion-Capture-System
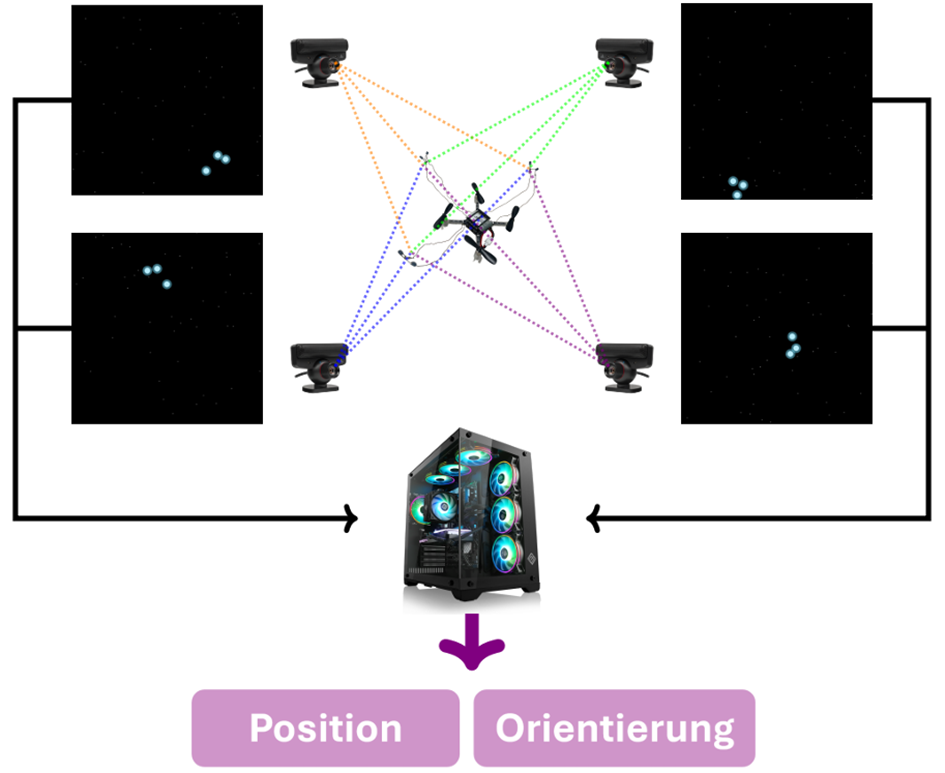
A second cornerstone of the project was the development of a low-cost motion-capture system. Instead of relying on high-end solutions such as VICON or OptiTrack (which can cost tens of thousands of Swiss francs), I built a custom setup. The drone – a Crazyflie 2.1 Nanocopter (later a Crazyflie 2.1 Brushless) – was fitted with infrared diodes. With four cameras capturing at 120 frames per second, the drone’s position was calculated in real time through triangulation. By using three diodes arranged on the drone, I not only wanted to estimate the position but also the orientation. Unfortunately, due to the cameras being budget and thus not having a high-end resolution, the estimation of the orientation was not feasible and was therefore taken from the onboard IMU.
Fig. 3: Motion-Capture-System Concept
System Integration
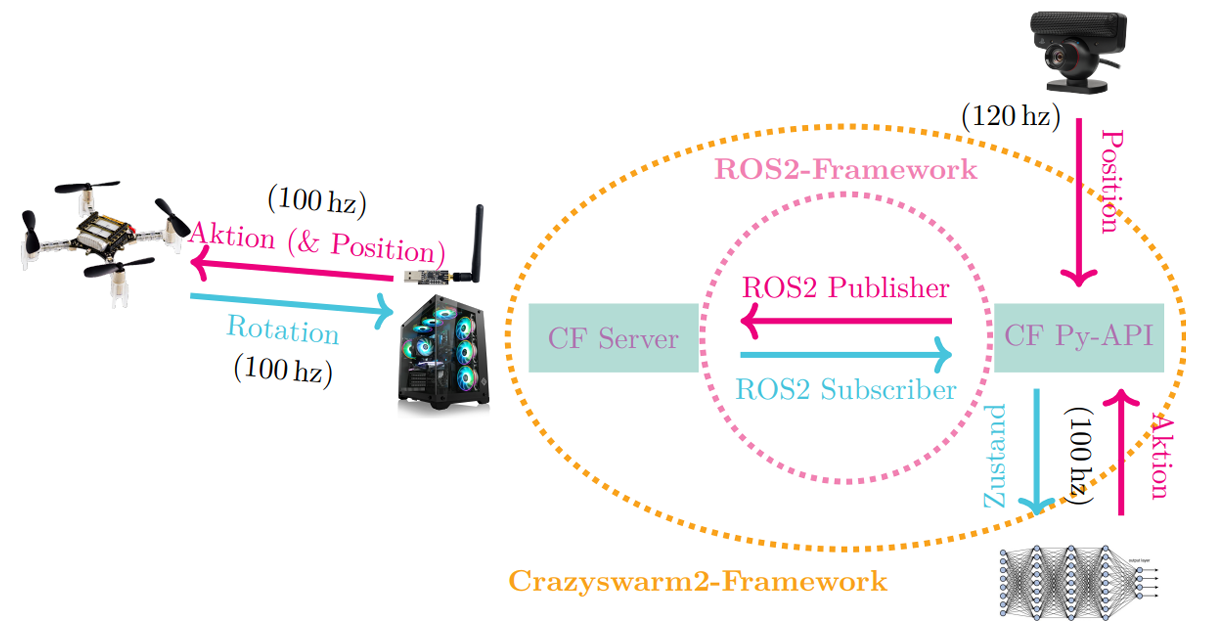
For integration, I relied on the ROS2 middleware and the Crazyswarm2 framework, which allowed the simulation and MoCap data to be processed together with minimal latency. This setup ensured that a policy trained in simulation could be executed on the real drone almost seamlessly.
Fig. 4: Sim2Real Integration Concept
Results & Discussion
The results demonstrated the effectiveness of the combined system:
In simulation, the RL agent completed tracks in nearly optimal time1, demonstrating robust generalization across different gate sequences.
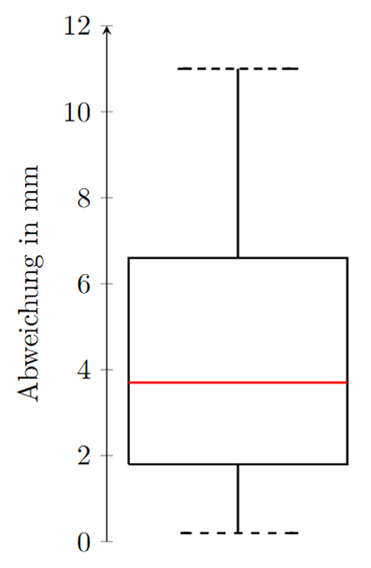
The motion-capture system delivered millimeter-level accuracy and reliable tracking in real time despite its simplicity. (see Fig. 5)
In real-world tests, the Crazyflie drone successfully completed tight gate sequences, even at speeds of up to 25 km/h, with a positional deviation of only 5–12 cm compared to the simulated trajectories. (see Fig. 6)
Given that the gates were roughly A3-sized openings (38 × 29 cm), the precision was sufficient to consistently hit every gate, confirming the feasibility of transferring simulated training into real-world racing. (Video)
Fig. 5: Boxplot of the deviation for collected points on a plane in millimeters
Fig. 6: Tracked Real Life Path on a given trackFig. 7: Realisation in my school’s physics laboratory
The system demonstrated that RL-based controllers can generalize effectively from simulation to reality, even with imperfect models. This robustness shows that RL is promising for real-world robotics applications where exact physical modeling is difficult or costly. To further investigate this robustness, I conducted ablation studies in simulation focusing on aerodynamic drag, as well as analyses of the MoCap system’s accuracy in measuring dynamic motion.
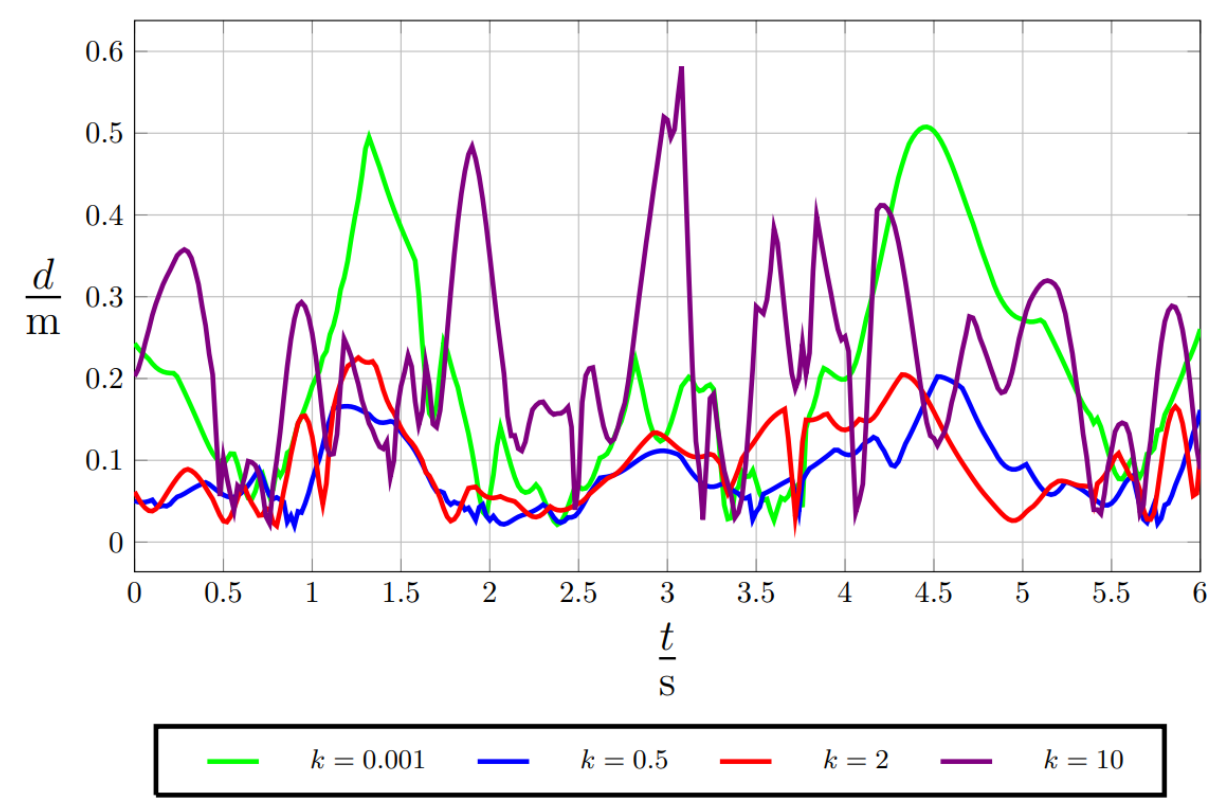
As for the aerodynamic drag, I introduced some randomness during evaluation, which deviated largely from what the Algorithm had trained upon. To achieve this, I introduced a parameter k which was multiplied with the correct aerodynamic drag to view how these differences would impact the flight. In Fig. 8 you can see the deviation from the real path over the course of a flight. As obviously more drag results in lower velocities, the two paths had to be fitted using the nearest two possible points. The results are impressive, even with an enormous change to training such as k = 10 the flight still performed somewhat okay, even though the gates probably wouldn’t have been hit anymore.
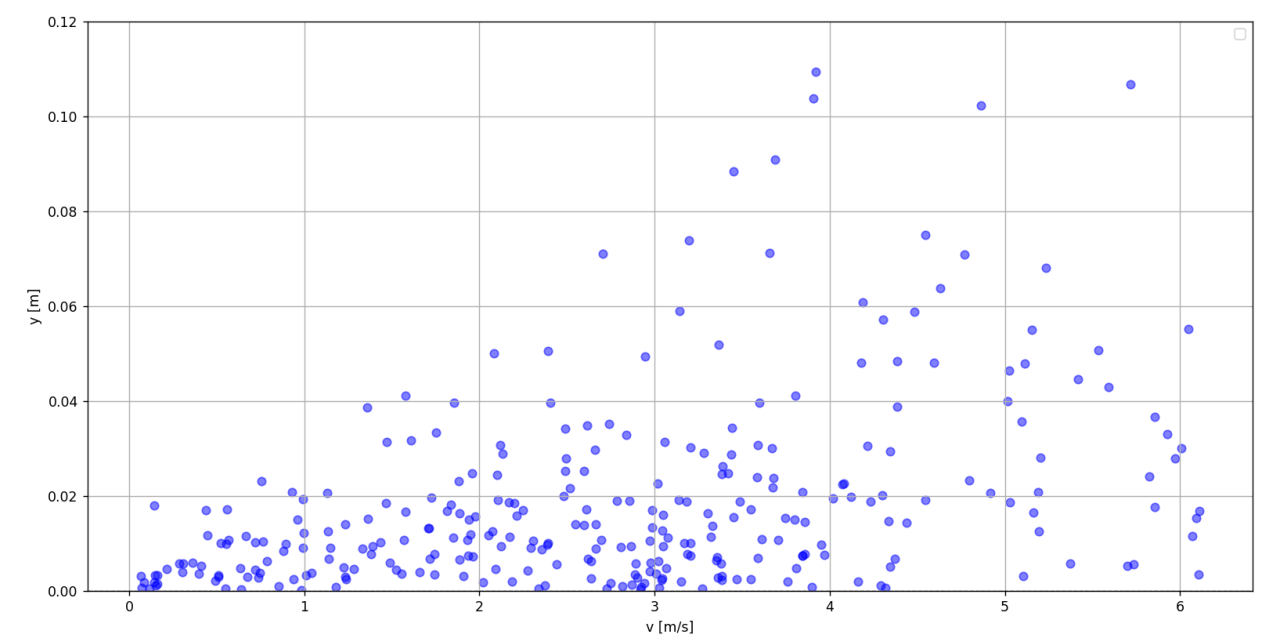
For the MoCap System, I used a mathematically representable motion, such as a pendulum. Then I performed a parameter optimization on this mathematical model and measured the deviation based on the current speed. There is a clear correlation between speed and deviation (see Fig. 9), which most likely was caused by the missing calibration of the cameras.
Fig. 8: Results of ablation studies on aerodynamic dragFig. 9: Experiment to confirm correlation between deviation and speed
Conclusion and Reflection
This work demonstrates that RL, combined with accessible hardware, enables precise and robust autonomous flight in dynamic indoor environments. The results underscore the potential of low- cost robotics solutions to democratize drone research. Even though it was a large project and there were some hard times, I enjoyed working on it a lot and believe that the result and the memories made with it are even more rewarding than any prize money!
Acknowledgments
To end this guest post, I want to sincerely thank Bitcraze for their amazing work and support during the development of this project. They have genuinely built such an incredible testbed for research in autonomous drones, it’s amazing! Without them, this project wouldn’t have worked out the way it did!
Near-optimal time here references to the theoretical boundary of a drone completing this track, given it’s parameters. To be clear, this is not fitting a polynomial with boundaries on their derivatives onto gate segments, as it was done during earlier approches in the 2010s. It was compared to multiple previous approches by UZH RPG such as Optimal Control (OC). Nevertheless, this comparison could be done more extensively in the future, as time ran short in the end. ↩︎
It’s been a while since our last update on what started as the High powered LED deck prototype. We have finally had time to push this project forward and are aiming to have a release at the beginning of 2026.
A New Name and a Familiar Design
You might notice that the deck has a new name, something simpler and a bit catchier, the Color LED deck (bottom-mounted and top-mounted). The overall design and specs, however, remain very similar to the original concept:
Using a highly efficient high powered LED for maximum brightness
DC/DC driving circuitry for improved efficiency and consistent performance
A light diffuser for smooth, even illumination and wide visibility
Two versions, top or bottom mounted, depending on your build
The Color LED Deck brings fully programmable lighting to your Crazyflie, allowing you to create and control custom light patterns in real time. It’s useful for flying in darker environments, for visual tracking experiments, or for adding synchronized light effects in drone choreography. The deck is now also compatible with the Crazyflie 2.1 Brushless, bringing dynamic lighting to our most recent platform for the first time.
Software architecture
This deck will also be the first to use the new DeckCtrl architecture. If you’re curious about how that works, you can read more about it in this earlier blog post.
The Color LED deck has some intelligence built into it that runs on a STM32C0 MCU. The open-source firmware is still under development, and the repository can be found here.
Availability
The final pricing is still being determined, but make sure to sign up for the in-stock notification at the Color LED deck store pages (bottom-mounted and top-mounted) to get an update as soon as it’s available. And as always, keep an eye on the blog for more updates as we get closer to release.
When flying the Crazyflie Brushless, you may have noticed something familiar, as the battery drains, the drone becomes less responsive and can not generate the same amount of thrust it had at the start of the flight. This is because as the state of charge drops, the battery voltage decreases, and that directly affects the thrust output of the motors.
We wanted to fix this. In this post, we’ll explain why the old compensation method wasn’t ideal, how we used system identification to design a new battery compensation scheme, and how this improves thrust consistency across the entire battery range.
Motivation
The key problem is simple: a dropping battery voltage means a dropping thrust for the same command. This leads to flights that start crisp and responsive but is reduced as the battery drain.
Our goal was to make sure that, regardless of the state of charge, the actual thrust stays close to the commanded thrust. Though, for manual flight, sometimes this might not be preferred, so there will be an option to turn it off.
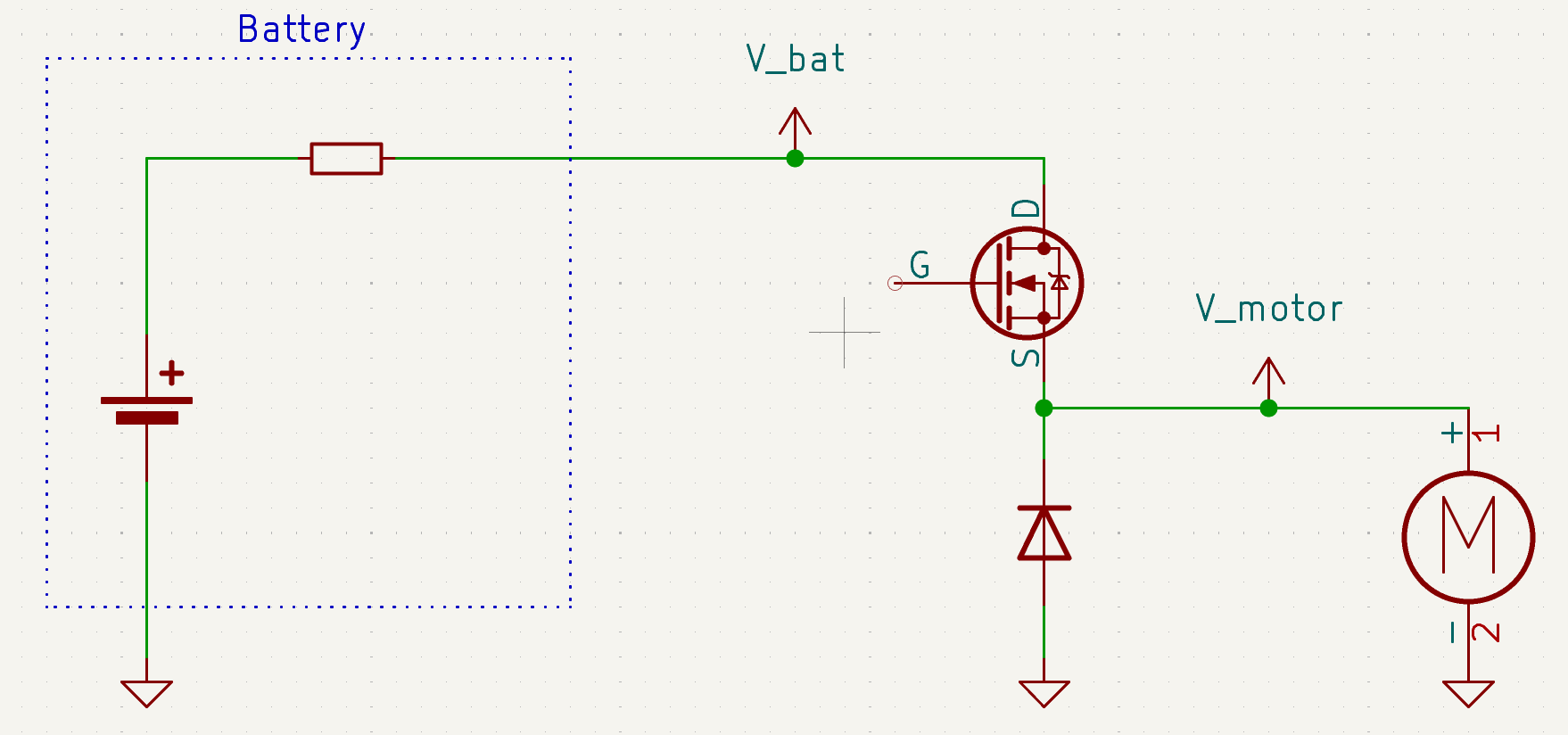
To illustrate the setup, here is a schematic of how the battery, PWM switching, and motor interact, effectively behaving like a simple buck converter:
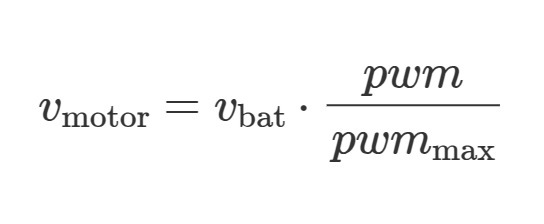
This means the motor voltage can be computed by:
System Identification
To design a proper compensation, we first needed to understand how thrust relates to motor voltage. This meant running a series of experiments on the thrust stand introduced in this earlier blog post.
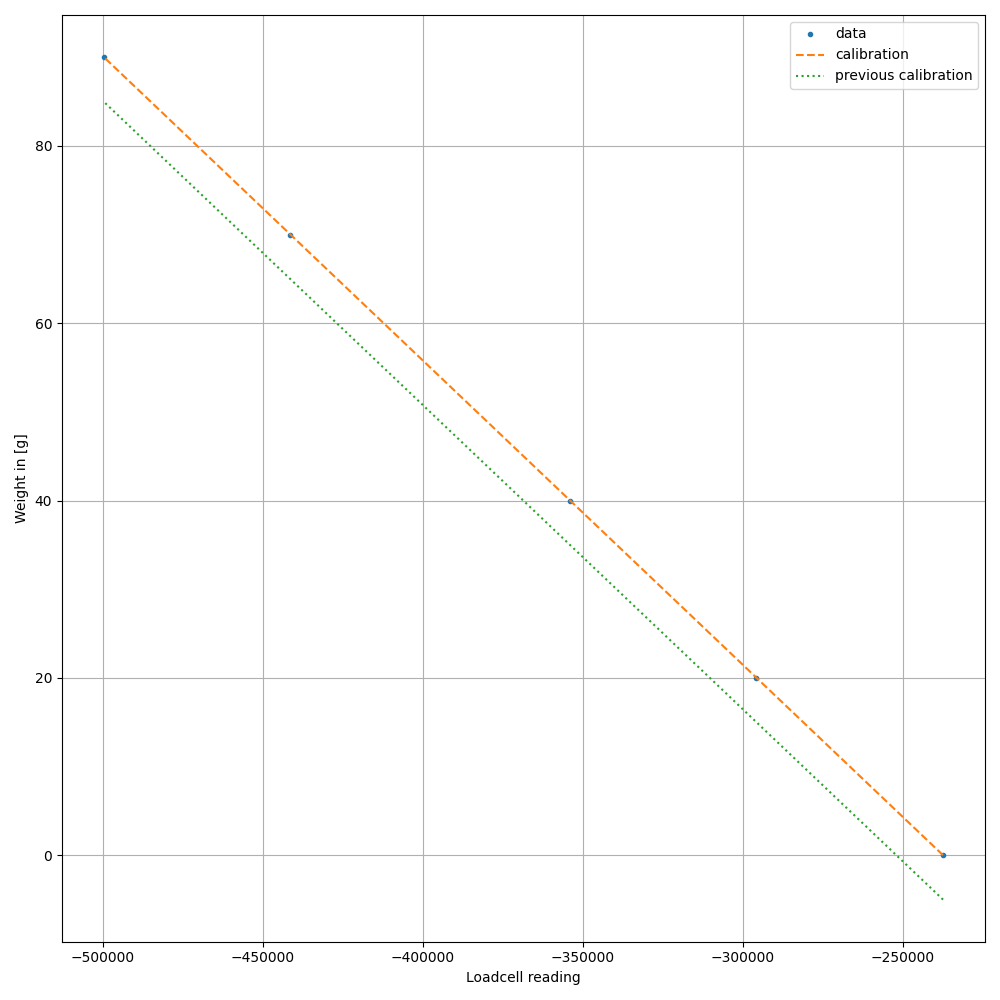
The first step was calibrating the loadcell used to measure thrust:
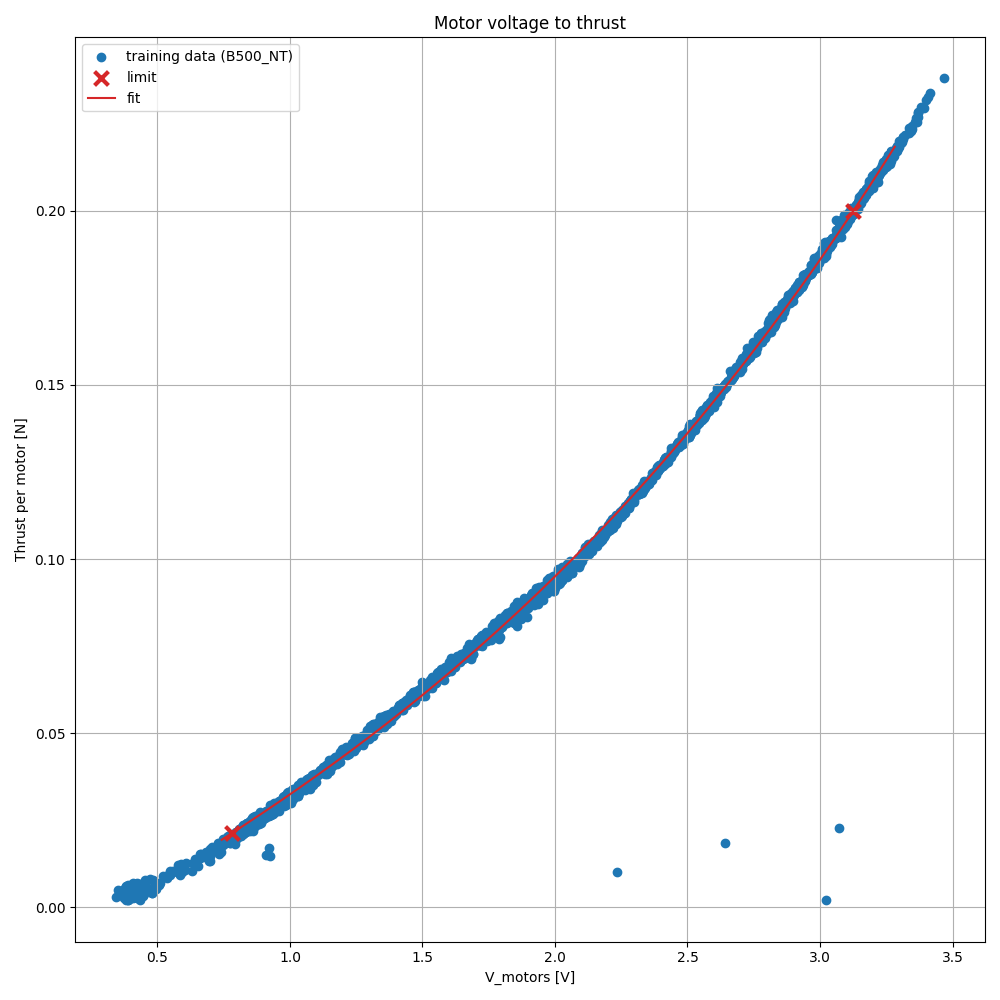
Once calibrated, we measured the thrust at different applied motor voltages.
As expected, the thrust can be modeled well by a third-order polynomial in motor voltage.
Mathematically, the relationship comes from two simple facts:
A DC motor torque is proportional to motor voltage and inversely related to motor speed.
A propeller’s thrust scales approximately with the square of the rotational speed.
Combining these effects leads to a nonlinear (third-order) relation between motor voltage and thrust.
Battery Compensation
The main idea is straightforward: instead of assuming the battery voltage is constant, we explicitly account for it. We can measure the battery voltage and low-pass filter it to reduce noise. Together with the necessary motor voltage from the curve above, we can solve the equation from above for the necessary pwm to apply:
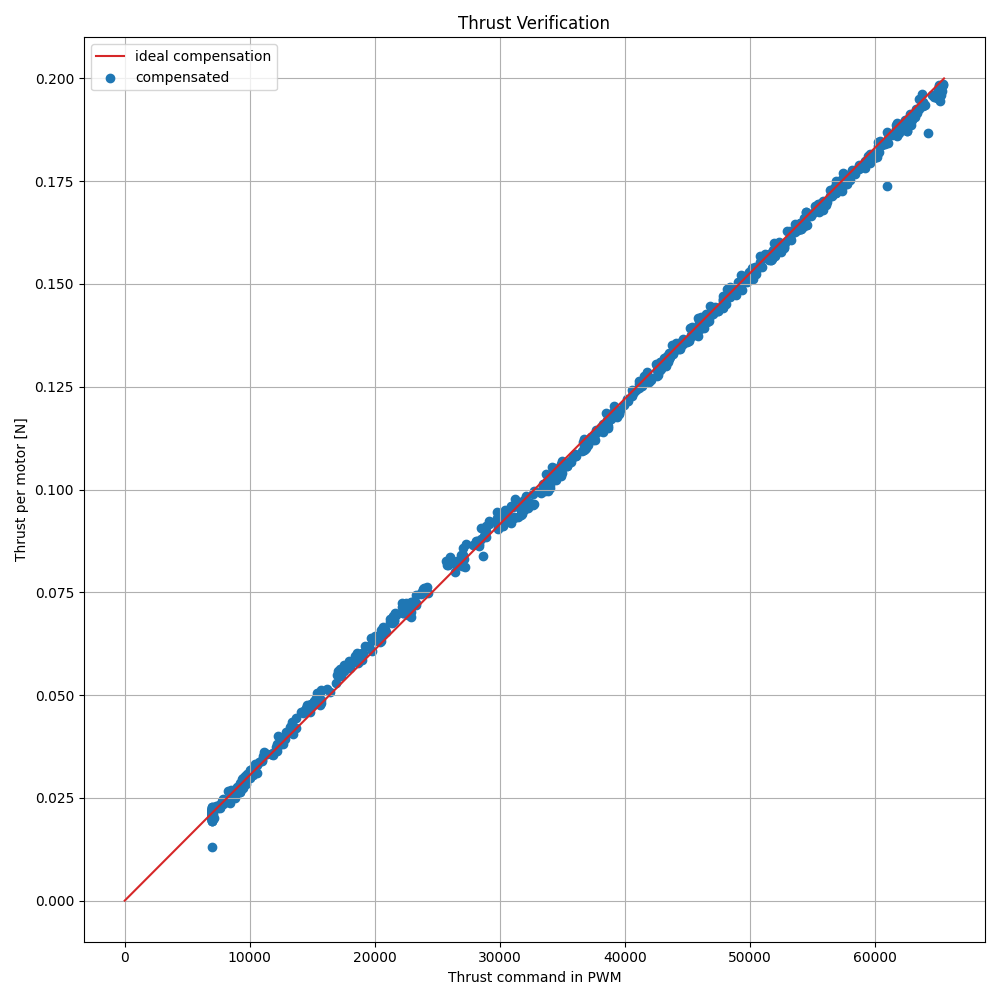
This corrected motor voltage is then fed into our third-order model to compensate the thrust command. With this compensation, the commanded-to-actual thrust relation is now approximately linear, which is exactly what we want. We can verify this by applying thrust commands and comparing them to the actual thrust.
Dynamic Behavior
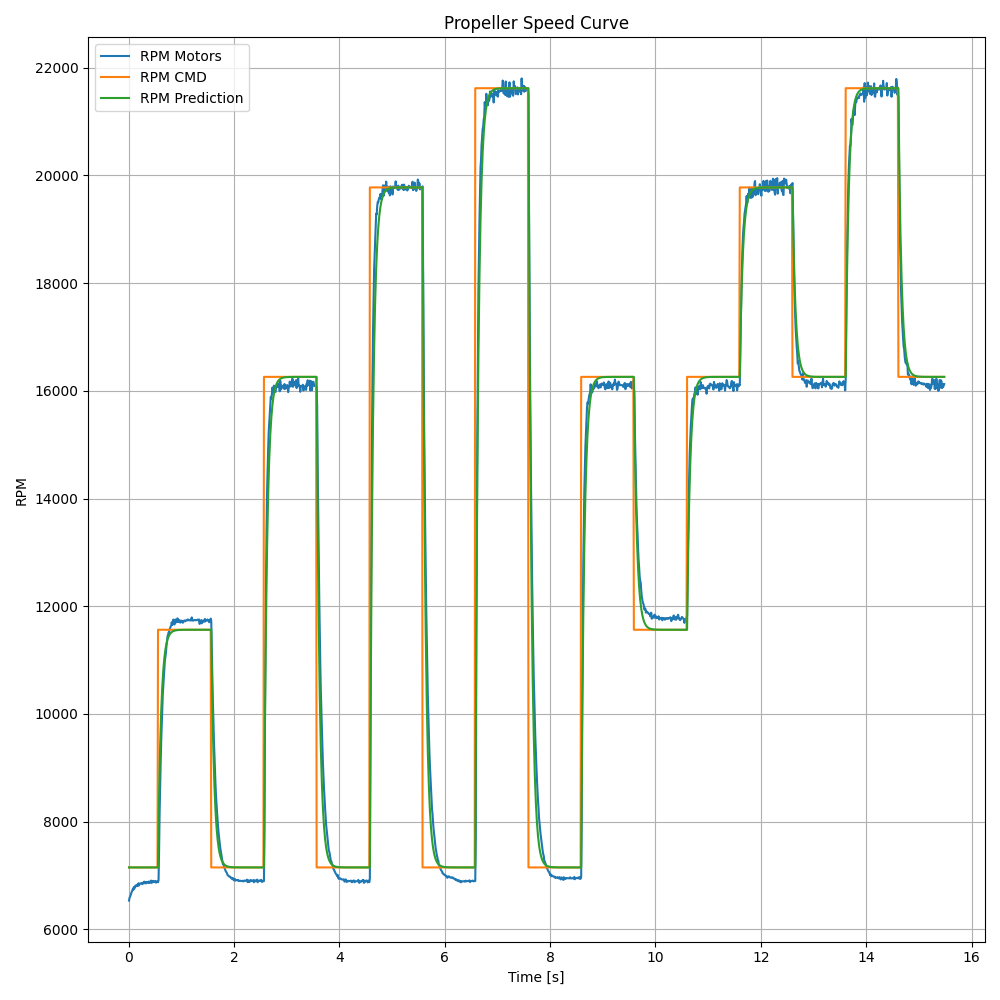
To obtain a complete parameter set of the motors and propellers, we also performed dynamic tests: commanding rapid increases and decreases in PWM and measuring the thrust response.
These dynamics are not required for the battery compensation itself, but they are very useful for accurate system identification and for simulation purposes.
Discussion and Conclusion
The new compensation method (#PR1526), ensures that thrust is consistent across the full range of battery charge. Compared to the old approach, it is both simpler to understand and more faithful to the actual physics of the motor–propeller system. The result is flights that feel the same at the end of the battery as at the beginning.
Beyond just improving flight performance, the system identification work also provides us with a full parameter set for the Crazyflie. We are already using these parameters in Crazyflow, our new simulation tool that models the Crazyflie dynamics with high fidelity. If you’re interested in simulation or in testing new control strategies virtually, check it out!
We’re excited to hear feedback from the community and to see what you do with this new capability.
One of the unique characteristic of the Crazyflie platform is the fact that decks (the Crazyflie expansion boards) are detected dynamically at startup. This makes the platform pretty much plug and play: plug a flow deck and you can fly autonomously with relative positioning, no configuration or recompilation required.
In this blog post we will present a new system we have implemented to identify and enumerate decks. This is intended to be the new default from now-on and can be used by anyone who wants to make a Crazyflie-compatible deck.
Current system: 1-Wire Memories
This is currently achieved using 1-Wire Memories. These memories can be discovered and addressed using a guaranteed unique serial number. This means that there can be as many memories as we want on the bus and they can all be discovered and read.
In the Crazyflie ecosystem, every deck has a 1-Wire memory that contains the identity of the deck. At startup, the Crazyflie discover and read all the memories which allows to discover all the decks and initialize the corresponding deck driver.
The future: DeckCtrl
The current system works very well but is has two major shortcommings:
The 1-Wire memory we are using does not provides GPIO or any other control. It makes it impossible to control the deck “out-of-band” in order to switch it on/off or launch a bootloader for example.
The 1-Wire memory has only one manufacturer and, because of a lot of reasons, we can only use a single model of it. At times it has caused us stress when the chip availability is low.
The new DeckCtrl-based system addresses these two problems by using a regular micro controller over I2C and provides support for GPIO as well as, in the future, UART, SPI and any other protocol that might be needed to handle the deck startup and configuration.
DeckCtrl is mainly a protocol definition. The current implementation is for STM32C011 micro controllers. While this could be implemented on any micro controllers, we will likely stick to the STM32C011 for the foreseeable future.
Deck discovery over I2C
One of the main innovations is the development of a new discovery and enumeration algorithm over I2C. Indeed, one of the main difference between I2C and 1-Wire is that 1-Wire memories are addressed using a 64Bit unique serial number while I2C uses 7 (or 10) bit addresses. This means that it is impractical to assign a unique I2C address to each device, and even if we tried to assign one address per deck type it would make it impossible to detect the same deck multiple times on a Crazyflie.
To solve that problem we designed a protocol that allows starting all DeckCtrl on the same address and enumerate them so that we can select all of them one by one, and then assign them a unique address on the bus. At a high-level this behaves very similarly to DHCP, where all devices will be assigned an address dynamically.
Once the decks have all been configured, it is possible read a memory to recover the deck identity and initialize deck drivers as we are currently doing.
Just that is a great step forward for Bitcraze: we are not dependent anymore to a single model of 1-Wire memory.
Deck life-cycle control
The second major improvement is what I called earlier “out-of-band” control of the deck. By that I mean that we can have control over the deck that is independent from the deck’s main micro controller chip. This is something we have long missed to, for example, be able to put decks in bootloader mode. The solution that has been used for the lighthouse deck is to always start in bootloader mode and then boot. This works, but has proven to be impractical for some use-cases and is not possible with all micro controllers.
The new DeckCtrl protocol defines space for GPIO control and the possibility for more in the future. This allows for example to switch ON and OFF a deck in software if one of the GPIO is used to control the deck power supply. We can also control the Reset and Boot pin of a micro controller in order to put it in bootloader mode.
Our goal there is to greatly simplify the design of more clever decks based on micro controllers. This will allow us, and anyone interested in making decks, to make more competent decks while making is easy to develop the firmware for them. For example, we will be looking at allowing to reprogram decks without having to restart the Crazyflie, which will make it much easier to develop and iterate.
Status
We have now finished the first iteration of the DeckCtrl protocol design and implementation. There is also a driver that exercises the GPIO part of it, this has been tested to work on many identical decks at the same time on a dev-deck we use for development:
This has been done in the context of the High-Power LED deck project. This future deck will feature a powerful RGBW LED which will be controlled by a micro controller onboard the deck. So it will be seen as an I2C device from the Crazyflie side. This design also shows the intent of DeckCtrl as this deck has 2 STM32C011: one implementing DeckCtrl and one application micro controller implementing the LED driver and other useful functionalities like color correction and temperature monitoring.