Flying formations with a swarm is always fun to develop and watch, but it is also a great way to stress-test the software behind it. As part of the development of cflib2, we put it through one of its toughest tests yet: flying 49 Crazyflies in coordinated formations.
The entire swarm was controlled using a single Crazyradio 2.0, highlighting the combined improvements in cflib2 and Crazyradio firmware over the past few months.
The setup
The hardware configuration was relatively straightforward. We used 49 Crazyflie 2.1 Brushless drones, each one equipped with a bottom-mounted Color LED deck for vivid lighting effects. For positioning, we used the Lighthouse positioning system, covering the entire flight area, which was roughly 5x5x2m. Its accuracy allowed the Crazyflies to fly grid formations with just 0.4m spacing between them.
One of the big practical challenges when managing a large swarm is swapping the depleted batteries for charged ones. Thanks to the Crazyflie 2.1 Brushless PCB design, each drone can now charge while sitting on its charging dock, making it much easier to prepare the swarm for the next flight.
Flying the formations
The swarm performed a sequence of synchronized formations under the control of a central PC. Rather than streaming the full trajectories to every drone, the formations are built using the Crazyflie’s High-Level Commander. Each Crazyflie receives simple motion commands such as go to or spiral, and executes the corresponding trajectory onboard. At the same time, it receives commands for changing the color of the Color LED deck.
Using cflib2, these commands can be sent to all 49 Crazyflies through a singe Crazyradio 2.0, which was not possible with cflib.
Looking ahead
This demonstration is an exciting milestone for cflib2 and showcases what the new library makes possible. While controlling 49 Crazyflies is an impressive demonstration, cflib2 is designed to benefit projects of every size. Whether you are flying a single Crazyflie or coordinating a large swarm, the goal is to provide a faster, more scalable, and more robust communication library.
Most of the functionalities from cflib have already been migrated to cflib2, and development is continuing. For many applications, cflib2 is already ready to use, so if you would like to try it out, you can find the repository here.
AI coding agents have become increasingly useful lately. The main reason, as far as I can understand, is that agents like Claude Code can close the loop: they can produce code, test it, and iterate. This is critical because models will make mistakes, and the feedback loop allows them to iteratively correct problems and usually converge on a working solution.
When trying to use coding agents with embedded systems, I quickly found myself becoming a manual tester, copy-pasting logs and describing behavior back to the agent. I was the one closing the loop, which is both inefficient and frustrating. So I started looking for ways to improve that.
Control by CLI
One of the great strengths of coding agents is that they can close the loop through the command line. They can invoke CLI tools, and by assembling them together they can achieve far more than any single tool would allow, this is essentially the Unix philosophy applied to AI-assisted development.
The most effective way to extend an agent’s capabilities that I’ve found so far is to build dedicated command line tools and let the agent use them. I ran a couple of experiments with dev boards where I had the agent create a small Python tool to control the board. The minimum useful functionality was: flash firmware, observe the console output, and reset the board. With just those three capabilities, the agent gains the ability to iterate almost entirely on its own.
The crazyflie-agent-cli
This is where the idea came from for creating such a tool for the Crazyflie. I chose to write it in Rust, partly to exercise our newly developed Crazyflie Rust library.
The capabilities I gave it are:
Flash the Crazyflie using the bootloader
Reset the Crazyflie into bootloader or firmware mode
Console, stream the debug text output from the firmware
Parameters, read and write parameter values
Log variables, stream the value of log variables
This is roughly the minimum viable feature set for Crazyflie firmware development. Since AI coding agents already know how to write C code and compile projects, this is, in theory, enough to close the loop and let an agent implement new functionality, flash it, observe the behavior, find a bug, and iterate, just like in a normal development workflow.
Designing a CLI for agents, not humans
One design challenge worth mentioning: the Crazyflie communication model is inherently stateful. As a human, you would open an interactive client, connect to the drone, and then poke around, reading parameters, watching log variables, tweaking things live. That interactive, session-based workflow doesn’t translate well to agents, which can’t use interactive CLIs. Instead, the crazyflie-agent-cli uses a daemon/client architecture: the agent first launches a background daemon that establishes the radio connection, then uses separate one-shot commands to interact with the already-connected Crazyflie. It’s not the most ergonomic design for humans, you end up needing two terminals, but it turns out to work surprisingly well for an agent, which has no trouble managing background processes and firing off commands independently.
Putting it all together
The CLI gives the agent the capability to interact with the Crazyflie, but it also needs to know how to use it. We could tell the agent at the start of every session “here is a tool you can use,” and it would figure things out by calling --help. But a much more efficient approach is to use skills.
Alongside the CLI, I created a skill that teaches the agent how to use the tool for Crazyflie firmware development: what the workflow looks like, how to flash, how to debug. This is what truly closes the loop, once the skill is in place, the agent knows what a Crazyflie is, how to flash it, and how to debug it, without needing much guidance.
The end result: Claude Code can implement simple firmware functionality largely in one shot, and even when it doesn’t get it right the first time, it will iterate and generally get there.
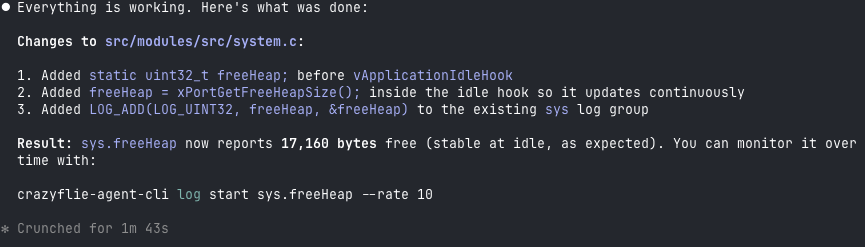
Here is an example prompt that works end-to-end:
I have a Crazyflie on channel 80, 2M, default address. Add a log variable that exposes
the free heap size so I can monitor it over time. Build, flash, and verify the new
variable appears in the log list.Code language:PHP(php)
After a little while, the Crazyflie has been flashed, functionality has been verified and result looks something like:
Conclusion
This tool is not an official Bitcraze product, it’s a Fun Friday project. But we think it’s a nice demonstration of what is becoming possible with AI coding agents. By closing the loop, we can start to accelerate firmware development the same way AI has already accelerated other kinds of software development. That said, this is a force multiplier, not a replacement for engineering judgment. The human still needs to be in the loop.
For instance, I believe this CLI is already capable enough to let an agent bring up a new deck with a new sensor, exactly the kind of scoped, iterative task where the available functionality is sufficient. The tool could certainly be improved with more features, and we’ll see how much that happens. But we expect it will likely find its way into some of our day-to-day Crazyflie work at Bitcraze.
For the time being, treat it as an experiment and an example, not a finished product. The code is on GitHub at ataffanel/crazyflie-agent-cli if you want to try it out.
During my first Fun Friday as a Bitcraze intern in 2021, I discovered the musical note definitions in the Crazyflie firmware and thought about creating a musical performance using the Crazyflie’s motors, but never followed through.
A few weeks ago I decided to finally take it on as a Fun Friday Project with the slightly more ambitious goal of playing music across several Crazyflies at once.
crazyflie-jukebox takes a MIDI file, preprocesses it into motor frequency events, then uploads and plays the song by spinning the motors accordingly. Each Crazyflie contributes 4 voices (one per motor), so polyphony scales directly with your drone count.
I implemented this as a firmware app and a Python script using the work-in-progress cflib2 (running on Rust lib back-end). You can find the repository here, try it for yourself! Be aware that certain note combinations can cause the Crazyflie to move, flip, or take off unexpectedly.
Fitting music into 4 motors
The pipeline starts by parsing the MIDI file with mido. From there, an interactive track selection step shows you the instrument names, note counts, and ranges for each track so you can pick exactly which ones to include. The selected notes are then converted from MIDI note numbers into Hz frequencies that the motors can work with.
Each Crazyflie can only play 4 simultaneous voices (one per motor) so there’s some work involved in squeezing music into that constraint. I implemented a couple different voice allocation strategies: melodic priority, which keeps the bass and melody prioritized; voice stealing, which works like a LRU synth; and a simple round robin, which just assigns each new note to the next motor in turn, cutting off whatever was playing there. There’s also a frequency range problem to deal with: motors only reliably produce pitches in roughly the C4–B7 range, so notes outside that window get octave-shifted to fit.
Upload protocol
Events are packed into compact 6-byte structs containing a delta timestamp, motor index, an on/off flag, and the target frequency. These get streamed to the firmware app using the app channel in a simple START; events; END sequence. The Crazyflie app has a buffer limit of 5000 events, which effectively caps the length and complexity of what you can play. The 5000-event buffer was an arbitrary choice and you could probably get away with more, but it was enough for most songs I threw at it.
Synchronization
One of the trickier elements of this project was keeping Crazyflies synchronized. For starting in sync, I didn’t do anything special: no broadcast, no t-minus countdown, just sending start commands to each drone in sequence and relying on cflib2 to do it fast enough that the delay is negligible. That said, I’ve only tested with a small number of Crazyflies. With a larger fleet you’d probably need to implement something for the initial sync.
The real challenge is drift over time. The STM32’s crystal is rated at around 0.1% tolerance. This sounds tiny, but in the worst case, over a 1-minute song that’s already ~120 ms of drift between two drones. In a musical context, humans start noticing timing offsets around 20-30 ms; less for percussive sounds, and less for trained musicians. So left uncorrected, drift would become very audible well before the song ends.
To fix this, all clocks are reset to zero at song start. The host then periodically sends resync packets containing its own timestamp in microseconds, and each Crazyflie applies an offset correction to stay aligned, which as a bonus also irons out any initial start latency.
Rough edges
The biggest design constraint is that a single track can’t be split across Crazyflies, so if a track has more than 4 simultaneous voices, some get dropped. I thought of each Crazyflie as its own instrument, which made sense at the time, but it does mean a dense MIDI tracks can’t be split across multiple drones, which feels limiting in hindsight.
The usable pitch range is about 4 octaves (C4–B7), and propellers need to be attached for accurate pitch since the motors need load to produce the right frequencies, which makes the whole thing a bit unsafe. Certain note combinations can cause a drone to move, flip, or behave unpredictably. Only brushed motors are supported, and there’s a hard 71-minute per-song limit on clock sync. But honestly, if you’re sitting there listening to a 71-minute song on your Crazyflie, the clock drift is the least of your problems.
This week we wanted to reflect on the progress that has been made lately in the Crazyflie ecosystem which will lead to bigger and better Crazyflie Swarms.
Radio communication
Like pointed out in the last blog post about Building a Crazyflie Flower Swarm with Rust, the new Rust Crazyflie library together with the new Crazyradio 2.0 has improved connection time and link efficiency by quite a bit.
It is now possible to connect swarms of multiple dozens of Crazyflies in seconds using a single radio and then make them fly while still getting position telemetry. So many Crazyflie on one radio does limit the maximum bandwidth per Crazyflie, but it does now work in a stable way!
Color LED deck
The recently released Color LED deck is a great addition to the ecosystem towards swarm. Its predecessor, the Led-ring Deck, has been used a lot by researchers to indicate state of individual Crazyflies in a Swarm. The Color LED Deck improves on that by providing a diffuser that allows to see the color from the side. This allows to mark states of big groups of Crazyflie much more clearly.
As a bonus, the Color LED Deck is very usable in other field like art and shows since it is much more visible and can be used to fly Crazyflies as “Flying Pixels”.
Autonomous landing and charging
Last year, we have released a Crazyflie 2.1 Brushless charging dock. This is a produced version of an idea we have been using with Crazyflie 2.1 and the Qi deck for years at fairs and conferences. It allows Crazyflies to autonomously land and charge. It is not only great for autonomous drone demos and shows but it also is a great waiting spots for swarms when doing research: the charging dock keeps the swarm charged so that when it is time to take off all the individuals starts with the same battery level.
Future endeavors
On the radio side there are still areas that would bring great improvement on communication stability. We are for example working on a channel-hopping communication protocol that should make the connection mostly immune to regular interference on 2.4GHz.
We are also working at improving other parts of swarm management, this includes for example solving the problem of flashing a full swarm of Crazyflie with the same firmware: we may be able to use broadcast messages more in order to drastically speed up the process instead of flashing the Crazyflie one per one.
Overall, working on bigger swarms allows us to work on the full stack and to make the Crazyflie a better drone for everybody.
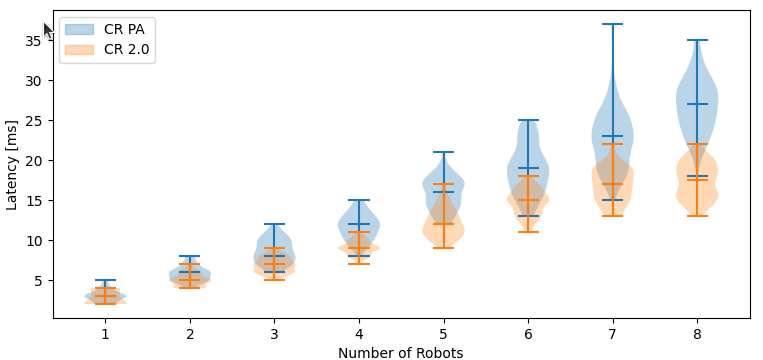
We are thrilled to announce that we just released a new firmware version for Crazyradio 2.0. This version implements a new USB protocol, called inline mode, that makes it much better at handling swarms of CrazyflieTM. The following measurement, made by Wolfgang Hönig, shows the improvement in latency scaling when using Crazyradio 2.0 v5.1 with the latest Crazyswarm:
Visit to the Multi-Robot Systems LAB in TU Berlin
This work started with a visit to Wolfgang’s lab in TU Berlin. Wolfgang is the original developer and maintainer of Crazyswarm 2, and has seen first-hand the problems Crazyradio 2.0 had with flying swarms. After a week of work together we made enough progress that we almost had Crazyradio 2.0 working with Crazyswarm.
The “almost” part was because Crazyradio 2.0 exhibits a bug when sending high frequency of broadcast packets mixed with uni-cast packets. This is primarily visible in Crazyswarm when flying at least 8 Crazyflies in a MoCAP system. The inline-mode implemented in 5.1 actually side-steps this bug.
What is inline mode
Crazyradio has quite a long legacy, the USB protocol dates from the original Crazyradio which was implemented to control Crazyflie 1. At this time, the main use-case was to fly a single Crazyflie. So, the protocol was optimized for connecting a single link. Setting link properties like radio channel and radio address uses USB-setup transaction, which are useful side-channel commands provided by the USB protocol. These setup transaction are not optimized to be fast though, they are designed to send occasional device commands, which was well suited for the original use of Crazyradio.
Flying with a swarm came later, and while the USB protocol was not optimized for this, it worked well enough. When controlling multiple Crazyflie, Crazyradio will communicate with each Crazyflie one after another. This requires setting up radio between each packet, which means at least as much Setup transaction as regular USB-Bulk transaction used for the packets. Things are worst with a MoCAP system, since the position of all the drones needs to be sent at a fast rate to all the drones, which is much more efficiently done using broadcast packet. This requires one mode setup transaction to activate/disable broadcast mode.
This is the main improvement of the inline mode. All radio parameters that matter when communicating to multiple Crazyflies are now sent as a header to the radio data packet itself, using the performant Bulk transactions used for data. This makes the communication to a swarm more performant and, more importantly, it scales much better.
Before one could expect ~1200 packet per seconds to a single Crazyflie and ~600 with 2 and more. Setting parameters used a lot of time limiting the performance. The new inline mode offers the same performance for one and many Crazyflie: the 1200 packets per seconds are shared equally between all connected Crazyflie. This should double the number of Crazyflie one can fly per Crazyradio.
How to use it
As of writing this blog post, the inline mode is only implemented in the latest commit of Crazyswarm 2. Implementation in the Crazyflie Python lib and the Rust lib are planned and should land before 2026. The mode will be enabled by default if Crazyradio 2.0 is updated to Firmware 5.1 or later. So if you want to benefit from the performance boost, update your Crazyradio by fetching the new firmware.
Future of Crazyradio 2.0
There is still a lot more to be done. Of course we will not have another 2x gain, but we have not reached the limit of what the Crazyradio 2.0 can achieve yet. Early tests with the “fast ramp-up” mode of the radio shows that we should be able to improve latency by another 10% quite easily.
We are, however, still limited by the current USB protocol philosophy that synchronize USB and radio communication. Decoupling both is already prepared in the inline protocol but might require more drastic re-engineering of the USB protocol.
Christmas is getting close, and while most people are just starting to hang lights and decorate their tree, we decided to go a little bigger and a whole lot brighter. Instead of adding tinsels and ornaments, we set up a swarm of 8 Crazyflie 2.1 Brushless drones with the upcoming Color LED decks along with some long-exposure photography magic, and decorated our flying arena with a Christmas tree made of Crazyflies.
How it works
The project is split into two parts: the firmware side that controls the Color LED decks and the script that is responsible for the choreography of the swarm.
The Firmware
Instead of lighting the LEDs based on time or commands, each Crazyflie uses its 3D position to decide on the correct color. This makes the whole communication with the central computer easier. Inside the firmware, multiple virtual spheres are created in the flight arena, just like ornaments floating in a tree-shaped structure. Whenever a Crazyflie flies into one of these spheres, its Color LED deck switches instantly from green to red. When it flies back out, it glows green again. Since we’re taking a long-exposure photo, the whole color pattern begins when the drones are ready to perform the choreography and stops when they start landing.
The Script
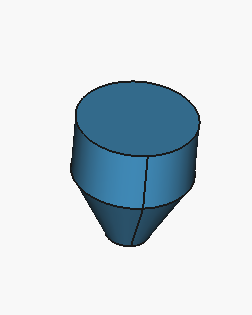
The python script is pretty simple. It commands a swarm of Crazyflies to perform a coordinated spiral choreography resembling a Christmas tree outline in 3D space. Each drone takes off to a different height, flies in spiraling circular layers, and changes radius as it rises and descends, forming the visual structure of a cone when viewed from outside. To pull this off with the current state of the cflib, we used 3 Crazyradios 2.0 and the high level commander.
A Testbed for Crazyradio 2.0 Improvement
Lately, we have been looking again at improving the radio communication with the Crazyflie. A prototype featuring a new USB communication mode for the Crazyradio was ready just in time for testing with the Christmas tree demo.
This new mode makes Crazyradio 2.0 much more efficient when communicating with swarms. With it, we were able to fly the same demo using only one Crazyradio 2.0 instead of 3 with the connection time to the swarm greatly accelerated. This demonstrates the efficiency of the new mode.
The new mode is called “inline setting mode” since it works by inlining all radio settings with the packet data, negating the need to issue time-costly USB setup requests. It is currently a Pull Request to Crazyradio 2.0 and the Rust Crazyradio driver. Support for Crazyswarm/ROS and CFLib will be implemented and when we know that the protocol works out for all libs, we will merge and release support for the new mode. It will be enabled by default so you will get the benefits from upgrading the Crazyradio 2.0 firmware and lib. We will talk more about it when it is released, in the mean time do not hesitate to test and feedback on the PRs ;-).
Demo source code
You can find the project’s repository as well as the rust version on Github. The python version was used for the picture and video, and the Rust one behaves identically.
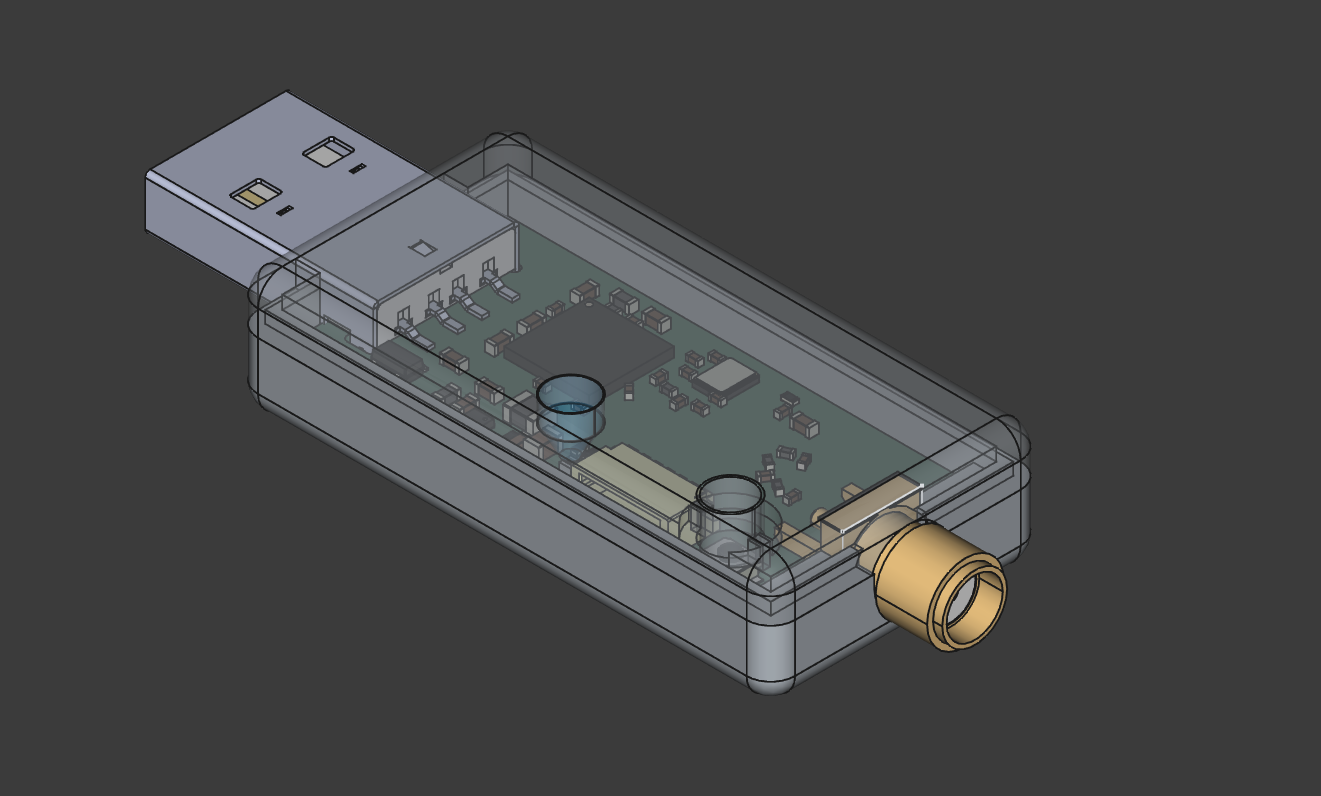
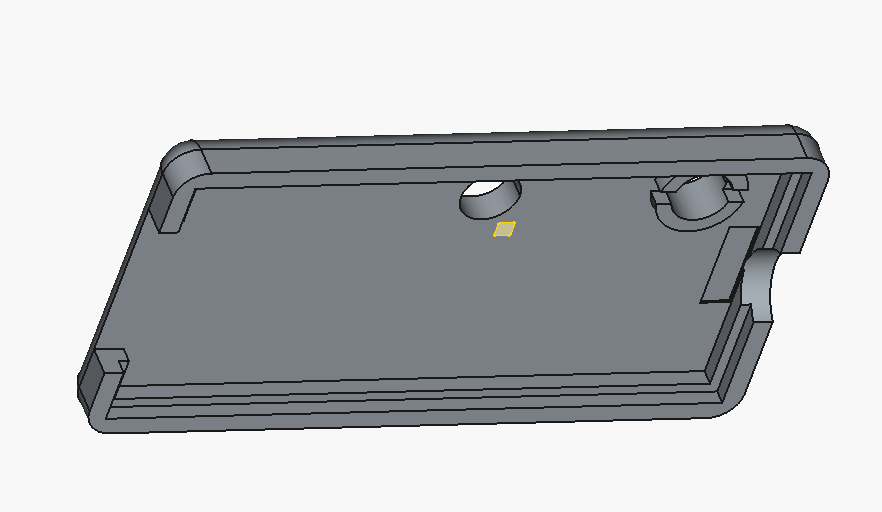
Lately, at home and at work during my Fun Fridays, I have been trying to learn more about 3D CAD and more precisely about FreeCAD, mostly in the context of (ab)using our 3D printers :). Inspired by a couple of Crazyradio cases that have already been published, I started working on a Crazyradio 2.0 case since this has not yet been done, I am quite happy about the result:
The design is mostly press-fit: the top and bottom parts are pressed together and hold thanks to the 3D printed layers interlocking in each-other. The LED lens is pressed in the top and the button actually slides and is guided by the top. The button is flush with the case since it is mainly a bootloader button and is not required to be pressed during normal use.
ECAD/CAD design
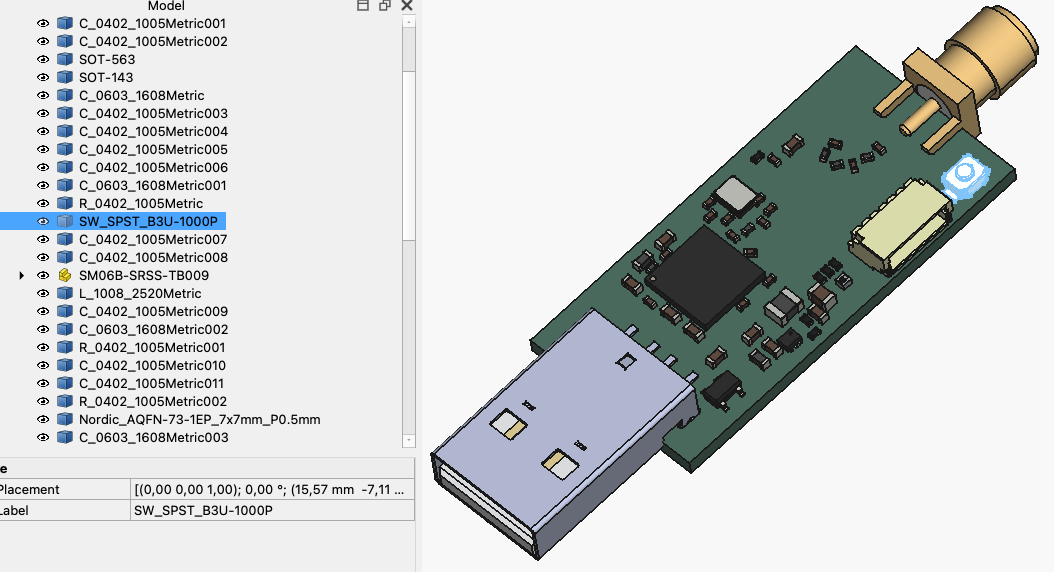
One of my goal when starting with this project was to experiment working both with Electronic CAD (KiCAD in my case) and Mechanical CAD (FreeCAD). There is an extension for FreeCAD that allows to go back-and-forth between the two tools, but in this case it was much simpler since my board was already finished, so I only needed to get a model of it in FreeCAD.
To do so, I made sure all the important components had 3D models in the Crazyradio electronic design. I had to import a couple of models from Mouser, and had to re-create the RGB LED in FreeCAD. I then exported it as a STEP file. This file can be imported in FreeCAD and retain all the interesting shape and surfaces useful to work with the model:
Shape binder: Keeping it DRY
Coming from the software/electronic world, we have this notion of DRY: Do not Repeat Yourself. Ideally I would like to apply the same to mechanical design and avoid as much as possible to write any measurement by hand. one way to do that with FreeCAD is with Shape binder. A good example of its use is with the LED lens.
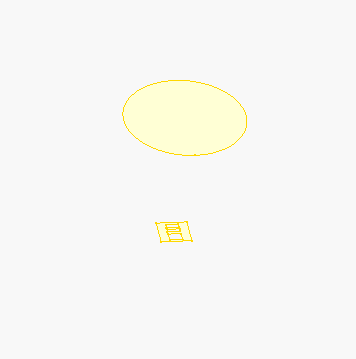
I wanted to put a translucent lens just on top of the Crazyradio LED. One way to achieve that is to create a Shape binder of the LED top surface onto the TOP and Lens. The LED top is the yellow square in the next picture and its presence allows to align perfectly the hole in the top cover to the middle of the LED on the PCB. This prevent all hazardous manual measurement when placing the hole.
For the lens design I can go one step further, I can create a shape binder both for the LED and for the hole in the top layer, this way the shape of the lens is derived from existing geometry and, to a large extent, does not have to be specified manually:
This allows to quite easily align the lens perfectly on top of the LED. The same principle is used for the button to get it to slide and press on the PCB switch with minimal play.
Final product
I pushed the current state of the case on GitHub. It is also available on Maker World. I plan on improving the design before deciding to name it 1.0 and to eventually upload it on Printables and Thingiverse.
If you want to learn more about FreeCAD, I can recommend this great video series on YouTube, it goes through a lot of very useful functionalities like the shape binders.
We are excited to announce that we are working on several new link performance metrics for the Crazyflie that will simplify the troubleshooting of communication issues. Until now, users have had access to very limited information about communication links, relying primarily on a “link quality” statistic based on packet retries (when we have to re-send data) and an RSSI channel scan. Our nightly tests have been limited to basic bandwidth and latency testing. With this update, we aim to expose richer data that not only enables users to make more informed decisions regarding communication links but also enhances the effectiveness of our nightly testing process. In this blog post, we will explore the new metrics, the rationale behind their introduction, and how they will improve your interaction with the Crazyflie. Additionally, we will be holding a developer meeting on Wednesday November 13th to discuss these updates in more detail, and we encourage you to join us!
“Link Quality”—All or Nothing
Until now, users of the Crazyflie have had access to a single link quality metric. Implemented in the Python library, this metric is based on packet retries—instances when data packets need to be re-sent due to communication issues. This metric indicates that for every retry, the link quality drops by 10%, with a maximum of 3 retries allowed. As a result, the link quality score usually ranges from 70% to 100%, with a drop to 0% when communication is completely lost. However, as packet loss occurs, users often experience a steep decline, commonly seeing 100% when packets are successfully acknowledged or dropping to 0% when communication is completely lost.
Client representation of link quality; no link, yes link
The current link quality metric has served as a basic indicator but provides limited insight, often making it difficult to gauge communication reliability accurately. Recognizing these limitations, we’re introducing several new link performance metrics to the Crazyflie Python library, designed to provide a far more detailed and actionable view of communication performance.
What’s Coming in the Upcoming Update
The first metric we are adding is latency. We measure the full link latency, capturing the round-trip time through the library, to the Crazyflie, and back. This latency measurement is link-independent, meaning it applies to both radio and USB connections. The latency metric exposed to users will reflect the 95th percentile—a commonly used measure for capturing typical latency under normal conditions.
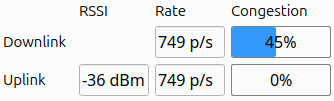
Next are several metrics that (currently) only support the radio link. For these, we distinguish between uplink (from the radio to the Crazyflie) and downlink (from the Crazyflie to the radio).
The first is packet rate, which simply measures the number of packets sent and received per second.
More interestingly, we are introducing a link congestion metric. Whenever there is no data to send, both the radio and the Crazyflie send “null” packets. By calculating the ratio of null packets to the total packets sent or received, we can estimate congestion. This is particularly useful for users who rely heavily on logging parameters or, for example, stream mocap positioning data to the Crazyflie.
The Received Signal Strength Indicator (RSSI) measures the quality of signal reception. Unlike our current “link quality” metric, we hope that a poor RSSI will serve as an early warning signal for potential communication loss. While RSSI tracking has been possible before with the channel scan example, this update will monitor RSSI in the library by default, and expose it to the user. The nRF firmware will also be updated to report RSSI by default. Currently, we only receive uplink RSSI, that is, RSSI measured on the Crazyflie side.
Work in progress client representation of new link performance metrics
We’ve already found these new metrics invaluable at Bitcraze. While we have, of course, measured various parameters throughout development, it was easy to lose track of the precise status of the communication stack. In the past, we relied more on general impressions of performance, but with these new metrics, we’ve gained a clearer picture. They’ve already shed light on areas like swarm latency, helping us fine-tune and understand performance far better than before.
You can follow progress on GitHub, and we invite you to try out these metrics for yourself. If there’s anything you feel is missing, or if you have feedback on what would make these tools even more helpful, we’d love to hear from you. Hit us up over on GitHub or join the developer meeting on Wednesday the 13th of November (see the join information on discussions).
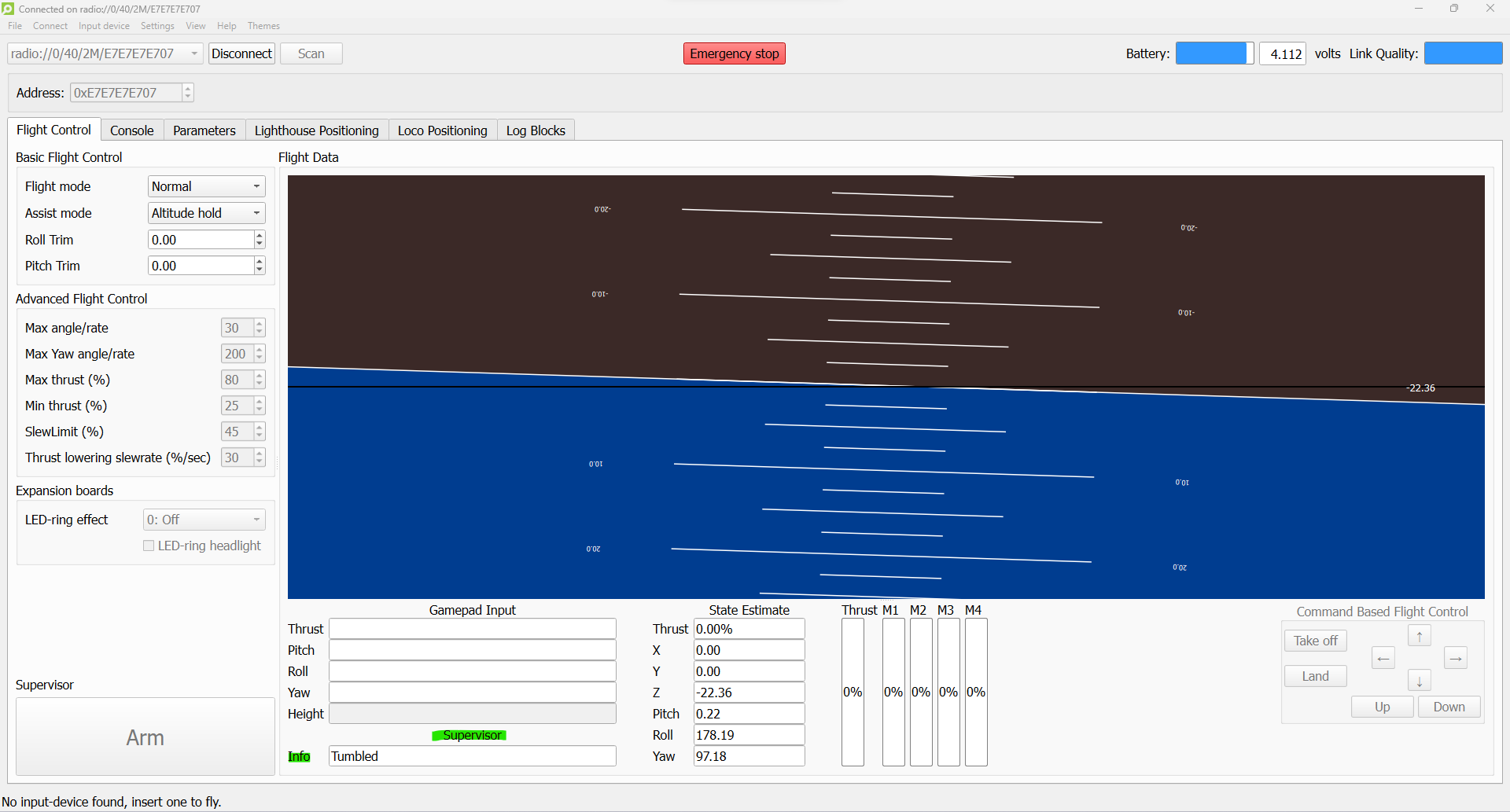
Before we start settling down and preparing for Christmas, it’s time for another release! The last one was before the summer in July, and we’ve had quite a few changes on the development master branch that we’d like to share. You can now download the latest Cfclient through pip and install the newest firmware on the Crazyflie to 2023.11 via the CFclient.
Latest changes in CFclient and Cflib
The most significant change in the CFclient is that we have finally transitioned from QT5 to QT6 for the GUI graphics. Additionally, we have addressed some issues with the toolboxes. Finally, we have added an information box to indicate the state of the supervisor, such as whether the Crazyflie is considered tumbled, flying, or if a restart is required because it is locked.
Cfclient when the crazyflie is tumbled with supervisor info
For the backend, namely the Crazyflie Python library, some important changes have been implemented. Along with fixes to the parameter and logging framework, full-state setpoints have been introduced. This feature has existed in firmware for a while due to the Crazyswarm1 project (now Crazyswarm2), but it wasn’t implemented in the cflib until now. Additionally, it’s now necessary to use `notify_setpoint_stop` in cases of switching between high-level setpoints and regular position setpoints. There is also a generic motion capture example now based on the libmotioncapture library.
Note that even though the CFclient has been converted to QT6, there are several examples in the Cflib folder that have not been updated yet. This will be fixed soon, and a ticket has been created for it. Additionally, in the Bitcraze-VM, there have been some reported issues with QT6 (see this ticket).
Latest changes in the firmware
The firmware has undergone some important changes too. On the STM side of things, the hybrid TDOA mode has been merged (check out this recent blog post). This feature is still considered experimental, so please refer to the documentation for the right settings. Additionally, support for the supervisor information box in the CFclient has been added. To utilize it, both the firmware and CFclient need to be updated. There is also a new example demonstrating communication between gap8 and cpx. Last but not least, it is now possible to create Python bindings for portions of the Kalman filter, mainly for the Loco positioning system. On the other hand, the NRF firmware has no added functionalities except for some build changes and fixes.
Crazyradio2 + LPS tools
We’ve also made some improvements in other firmware or tools. Starting with the Crazyradio2, which includes fixes for broadcasting (important for you Crazyswarm2 folks!). We also aimed to make a new release of LPS tools since we heard that people were experiencing issues with USB devices. Unfortunately, there are some problems with the GitHub release actions, so that will likely be delayed. For anyone facing USB issues, you can install the LPS tools from source with Python following the ReadMe’s instructions.
As we already announced last week in the Monday blog post, we will be having a developer meeting this Wednesday (6th Dec, 3 pm CET) regarding the Flow deck (refer to this discussion thread for joining information). Since we usually don’t fill up the entire hour, the last part of the developer meeting is available for some generic support questions face-to-face (online), including questions about the release!
As you might have noticed, most of our bundles are currently unavailable because Crazyradio PA is out of stock. We are currently finishing the production for the Crazyradio PA replacement, Crazyradio 2.0 which means that, if everything continues to go well, it should be in stock and ready to ship in a couple of weeks.
One of the first produced unit of Crazyradio 2.0, fresh out of a successful run in the test rig
Crazyradio 2.0 is designed to be a drop-in replacement for Crazyradio PA as well as an improvement that will allow new development and improvement for the communication with Crazyflie(s). Among the hardware change we have:
Much more powerful microcontroller: the nRF52840, a Cortex-M4 at 64MHz, 1MB of Flash, 256KB of ram with a much more flexible 2.4GHz radio hardware compared to Crazyradio PA.
Safe and easy to use Bootloader with button to launch it for easy upgrade
RGB LED for richer status indication
The same SWD debug port as on the Crazyflie 2.0 for easy development and debugging
As on Crazyradio PA, a radio power amplifier with a 20dBm (100mW) output power
Only support 1Mbit/s and 2MBit/s bitrate (Crazyradio PA also supported 250Kbit/s)
The improved microcontroller and safe and easy to use bootloader are the most important as they will allow us to experiment and implement new radio protocols over time. Things like peer-to-peer protocols, channel hopping and link cryptographic protection are now possible to work on.
All these new functionalities will come later though. So far we have been really hard at work to get the hardware ready and out as a Crazyradio PA replacement. To achieve that goal we have developed two version of the Crazyradio 2.0 firmware:
The Crazyradio2 firmware that implements the same radio protocol as the Crazyflie 2.0 but has a new improved USB protocol that improves performance and allows for the development of new radio protocols. It will also not require any driver on Windows.
The Crazyradio2-crpa-emulation firmware that emulates a Crazyradio-PA USB and Radio protocol. This version of the firmware allows to use the Crazyradio 2.0 with any client that supports Crazyradio PA.
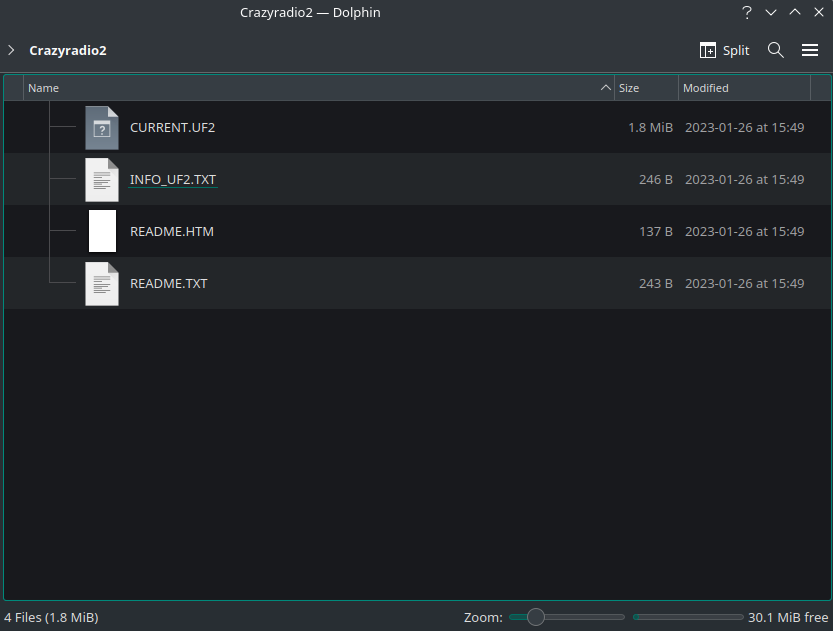
Since support for the new USB protocol is not implemented in any clients yet, we are shipping the Crazyradio 2.0 in bootloader mode. When plugged in a computer for the first time, Crazyradio 2.0 will appear as a USB disk drive:
Clicking on README.HTM will open the web-browser to the Bitcraze website page that lists both available firmware with explanations of which one to choose. At first the CRPA-emulation firmware will likely be the most useful but over time the new Crazyradio2 protocols will be the best choice. Once the firmware downloaded it can just be drag-and-dropped in the Crazyradio 2 drive and the radio will restart in firmware mode and be ready to use!
Pressing the button on the Crazyradio when inserting it in the PC will launch the bootloader again and we are planing on making future updates possible via the Crazyflie clients as well. This is an exciting time as we will now be much more free to experiment, iterate and eventually greatly improve the communication capabilities of Crazyradio as well as of the Crazyflie quadcopters!
Now for the more practical information: if everything goes well Crazyradio 2.0 will be available in the bitcraze store the last week of April 2023, we are going to sell it for 40 USD. This means that most bundles should also be back in stock with Crazyradio 2.0 replacing Crazyradio PA in the bundles.