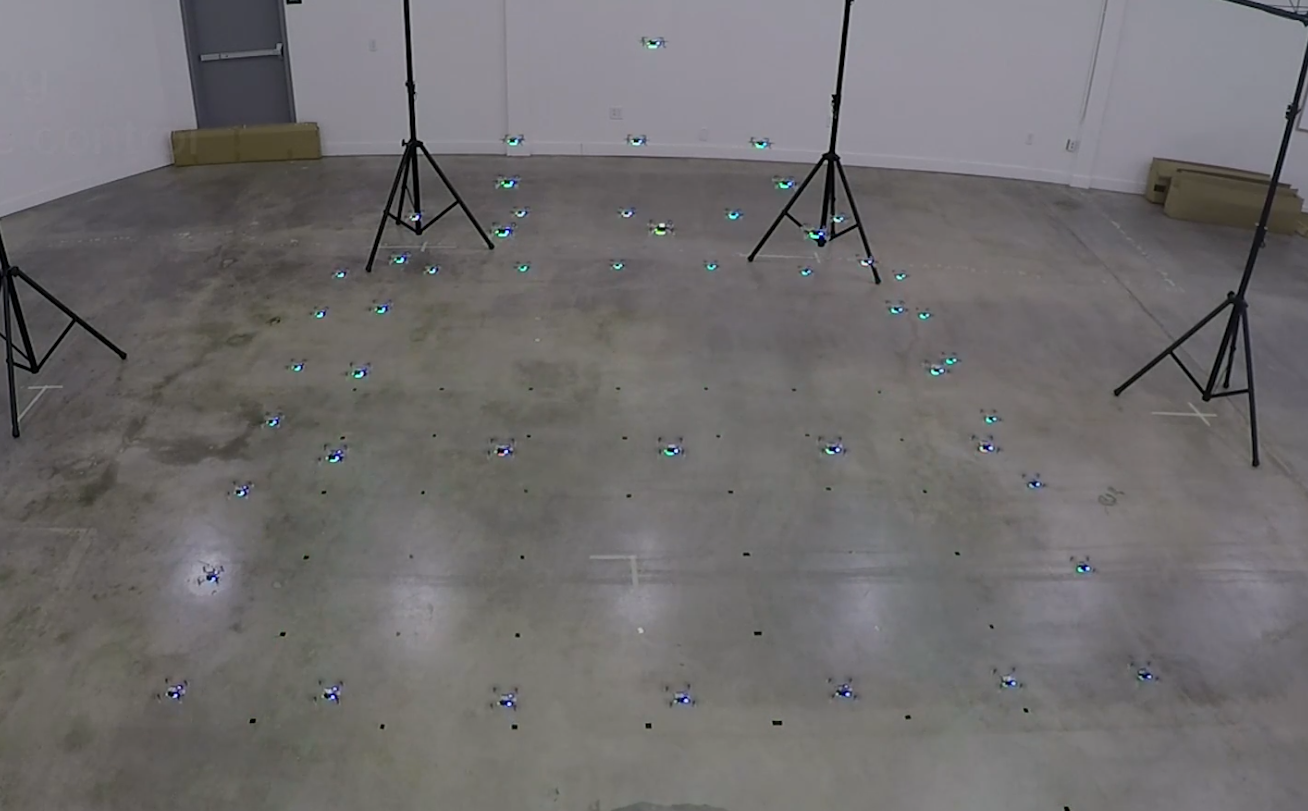
Flying formations with a swarm is always fun to develop and watch, but it is also a great way to stress-test the software behind it. As part of the development of cflib2, we put it through one of its toughest tests yet: flying 49 Crazyflies in coordinated formations.
The entire swarm was controlled using a single Crazyradio 2.0, highlighting the combined improvements in cflib2 and Crazyradio firmware over the past few months.
The setup
The hardware configuration was relatively straightforward. We used 49 Crazyflie 2.1 Brushless drones, each one equipped with a bottom-mounted Color LED deck for vivid lighting effects. For positioning, we used the Lighthouse positioning system, covering the entire flight area, which was roughly 5x5x2m. Its accuracy allowed the Crazyflies to fly grid formations with just 0.4m spacing between them.
One of the big practical challenges when managing a large swarm is swapping the depleted batteries for charged ones. Thanks to the Crazyflie 2.1 Brushless PCB design, each drone can now charge while sitting on its charging dock, making it much easier to prepare the swarm for the next flight.
Flying the formations
The swarm performed a sequence of synchronized formations under the control of a central PC. Rather than streaming the full trajectories to every drone, the formations are built using the Crazyflie’s High-Level Commander. Each Crazyflie receives simple motion commands such as go to or spiral, and executes the corresponding trajectory onboard. At the same time, it receives commands for changing the color of the Color LED deck.
Using cflib2, these commands can be sent to all 49 Crazyflies through a singe Crazyradio 2.0, which was not possible with cflib.
Looking ahead
This demonstration is an exciting milestone for cflib2 and showcases what the new library makes possible. While controlling 49 Crazyflies is an impressive demonstration, cflib2 is designed to benefit projects of every size. Whether you are flying a single Crazyflie or coordinating a large swarm, the goal is to provide a faster, more scalable, and more robust communication library.
Most of the functionalities from cflib have already been migrated to cflib2, and development is continuing. For many applications, cflib2 is already ready to use, so if you would like to try it out, you can find the repository here.
Some Fun-Friday projects begin with a clear goal and a straight path to the finish line. The best ones, however, take you somewhere completely unexpected.
This project originally set out to build a device for determining spatial coordinates within a Lighthouse-covered flight area. Instead, it evolved into the Lighthouse Wand, a hand-held “magic wand” letting you grab and move drones in 3D space just by pointing at them.
How it works
The Wand is a Crazyflie platform with a Lighthouse positioning deck. That’s enough for it to know its own position and orientation in the room. When the button is pressed, it starts broadcasting those 6 numbers over Peer to Peer radio.
Any Crazyflie/receiver in the room on the same radio channel, listens to those packets and runs a simple “grasping” algorithm: while the wand line (positive x-axis) passes close enough to the drone, it builds up a confidence score. Once the score crosses a threshold, the drone is considered grasped. From that point on, it just keeps a specific distance from the wand, while being on the wand line.
When the button is released, the grasped drone either hovers in place, or lands, depending on the release height.
The Color LED deck on the receiver drone, gives you visual feedback: yellow while the Crazyflie is building up its confidence score, green when it’s grasped, and red when it’s landing.
A big advantage of this system is that all interactions run entirely onboard the Crazyflies, allowing them to operate without relying on the cfclient or cflib during flight.
The hardware design
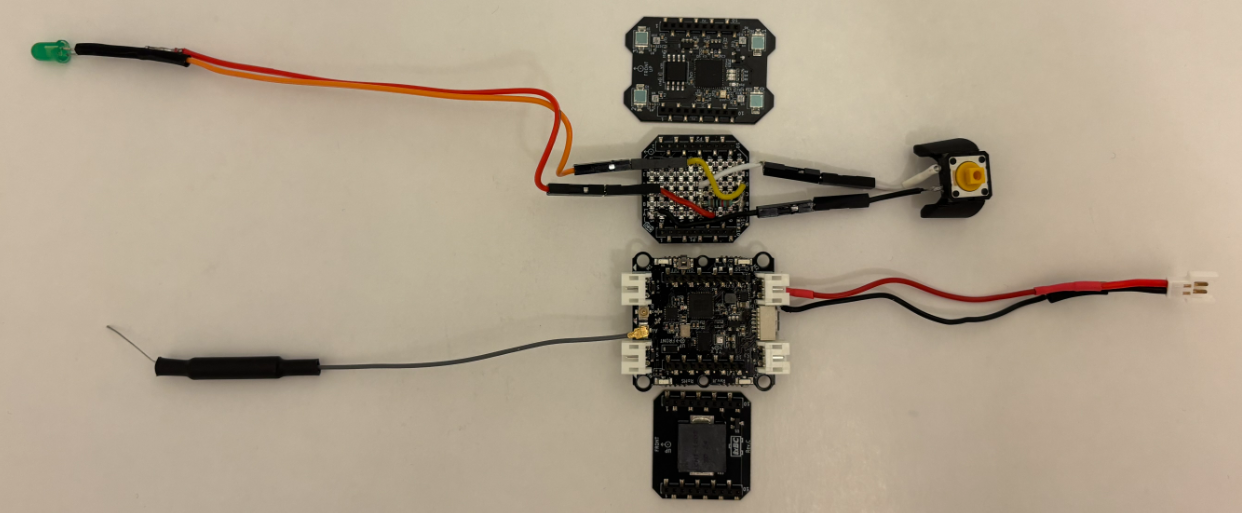
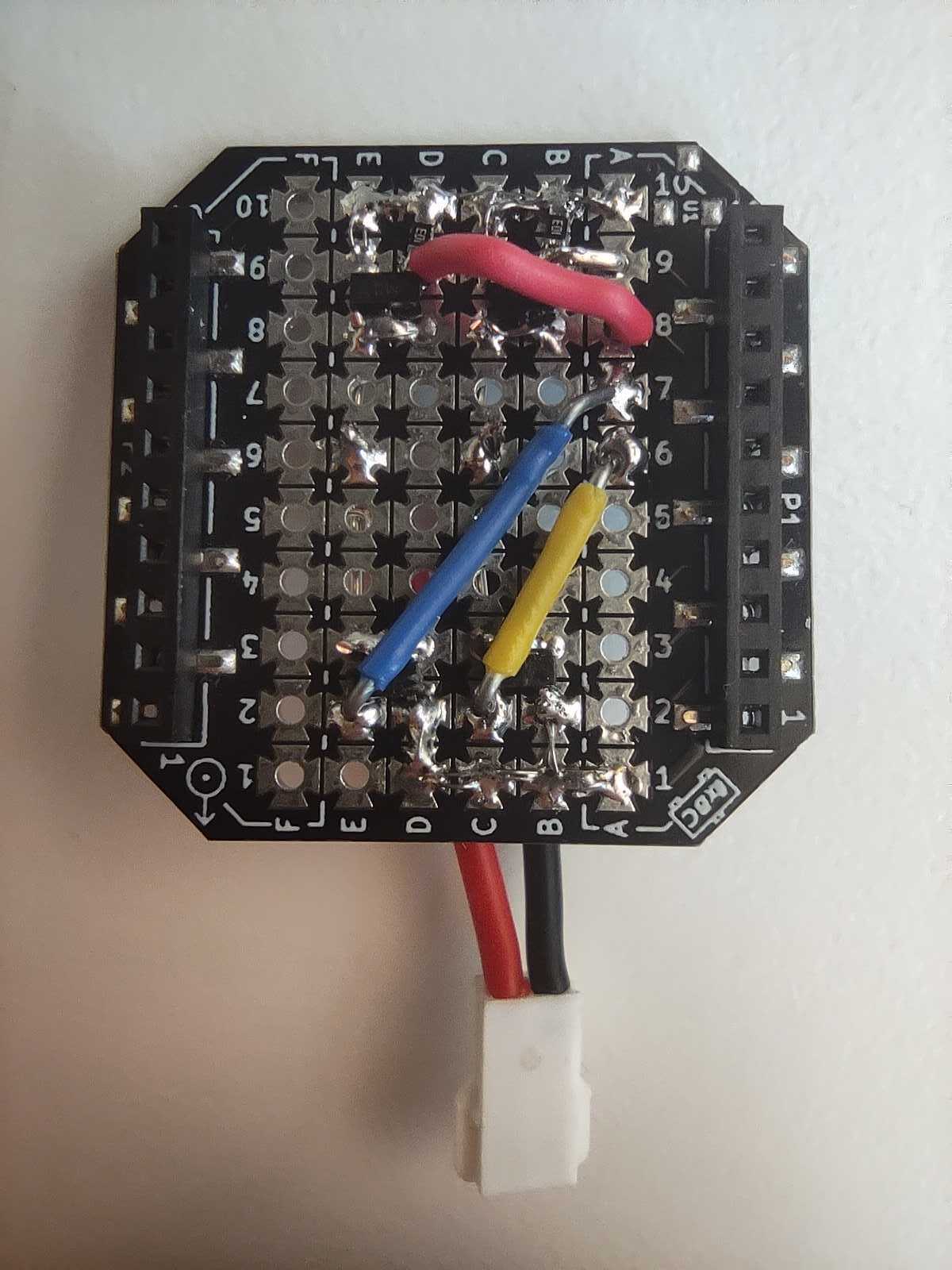
The wand is a Crazyflie Bolt 1.1 with a Lighthouse positioning deck and a Buzzer deck for audio feedback. To allow for user input, I created a simple “Button deck” based on the Prototyping deck utilizing the GPIO pins of the Crazyflie. It also includes an LED for visual feedback when the button is pressed.
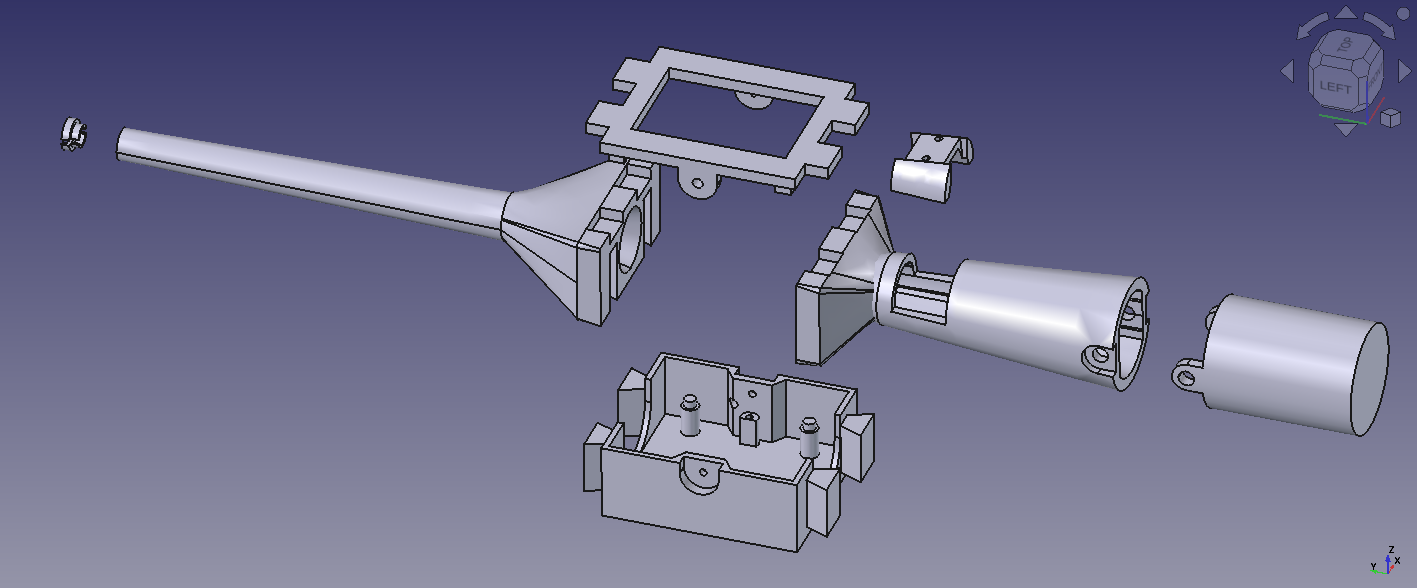
The casing is fully 3D printed in PLA and was designed to give the device a more wand-like feel in the hand. Its shape also makes it easier to hold, aim, and use intuitively during interaction.
The firmware design
Both the Wand and the receiver are firmware apps created on top of the crazyflie-firmware. In the design that I followed, there is a clean separation between the two parties. The wand is a pure broadcaster: it only reads its own pose and transmits it. All grasping logic and flight control run independently on each receiver. Since each receiver is fully autonomous, the system scales to any number of drones with no extra load on the wand.
Where to find the Lighthouse Wand?
A version of the Lighthouse wand is now integrated in our decentralized swarm demo, where it can be used to interact with multiple drones, while the collision avoidance algorithms are still on. This system was first showcased at the European Robotics Forum 2026 in Stavanger, and we’ll also be bringing it to ICRA 2026. If you’re there, stop by booth 91and try flying a bunch of Crazyflies yourself using the wand.
You can find the complete Lighthouse Wand project in this repository. It contains the firmware, the hardware files, and detailed documentation to build and experiment with the wand yourself.
Swarm robotics has undergone rapid evolution and is now used in real-world applications. At the center of this exciting journey is the Crazyflie. Although small, its capabilities make it ideal for swarming applications in research, education, and prototyping.
Small and Safe for Indoor Use
The Crazyflie 2.1+ is a nano-quadcopter that weights only 29g. Crazyflie swarms are safe to interact with and can fly in confined spaces like labs or classrooms. If the maximum recommended payload of 15g is not enough for your application, the Crazyflie 2.1 Brushless is a suitable alternative, as it has a recommended payload of 40g. These two platforms are compatible, allowing them to cooperate within a mixed swarm of your preference.
Setting Up a Crazyflie Swarm
Transitioning from a single Crazyflie to a swarm setup requires certain adjustments. Depending on the amount of data that you want to transfer to and from your Crazyflies, you might need to use more Crazyradio 2.0 dongles. We recommend 3-4 Crazyflies per radio but under ideal conditions each one can handle up to 15 drones. To get the most out of your swarm, you will also need an external positioning system. This could be a Lighthouse positioning system, a Loco positioning system or a Motion Capture system. This allows each Crazyflie to know its absolute position in space. A very interesting swarming project is Crazyswarm where they managed to fly a swarm of 49 Crazyflies using 3 Crazyradios and different positioning systems.
The Crazyswarm project. You can find the full video here.
Available Swarming Frameworks and Examples
To make your introduction to a Crazyflie swarm smoother, our python library contains a swarm class. It allows the user to control each drone in the swarm simultaneously, sending commands either in parallel or sequentially. The library also includes examples that demonstrate the capabilities of a Crazyflie swarm. For users interested in exploring advanced decentralized swarm schemes, we support firmware that enables peer-to-peer communication. This is at an experimental level and has been used for the decentralized brushless swarm demo and for the ICRA 2025 demo.
Getting Started
Interested in building your first swarm? Explore our swarm bundles featuring multiple platforms and positioning systems that suit your research or development needs. If you are new to the Crazyflie ecosystem, make sure to follow the step-by-step swarm tutorial to better understand the setup process, communication flow, and control mechanisms involved in operating a drone swarm.
A couple of weeks ago, we were at ICRA 2025 in Atlanta. This year’s ICRA drew over 7,000 attendees, making it the biggest edition yet. We had a booth at the exhibition where we showed our decentralized swarm demo. The setup included a mix of Crazyflie 2.1+ units with Qi charging decks and Crazyflie 2.1 Brushless platforms with our new charging dock. The entire swarm operated onboard, with two Lighthouse base stations for positioning. More details about the setup can be found in the recent swarm demo blog post.
8 Crazyflies flying simultaneously in our decentralized swarm at ICRA 2025
Some of the brushless drones carried our high-powered LED deck prototype to make the swarm more visible and engaging. One of the drones also had a prototype camera streaming deck, which held up well despite the busy wireless environment.
A Different Perspective
This year we were also invited to participate in a workshop: 25 Years of Aerial Robotics: Challenges and Opportunities, where I (Rik) gave a short presentation about the evolution of positioning in the Crazyflie, from webcam-based AruCo marker tracking to the systems we use today.
Usually, we spend most of our time on the exhibition floor, so being part of a workshop like this was a different experience. It was interesting to hear researchers mention the Crazyflie in their work without needing to explain what it is. That kind of familiarity isn’t something we take for granted, and it was nice to see.
Many thanks to all the participants of the workshop '25 Years Of Aerial Robotics: Challenges And Opportunities' that we had the pleasure to co-organise for #ICRA2025. The speakers, young researchers, chairpersons and, of course, the attendees all made it a unique experience? pic.twitter.com/WNfUUYLtop
The workshop also gave us a chance to talk with both established researchers and newer faces in the field. What stood out most was hearing how people are using the Crazyflie in their work today. It’s very rewarding to see how what we do at the office connects with and supports real research.
Catching Up and Looking Around
One of the most rewarding parts of the conference was the chance to connect directly with people using the platform. We talked to many users, both current and past, and saw new research based on the platform. It was also great to reconnect with Flapper Drones, who build flapping-wing vehicles powered by the Crazyflie Bolt. And it was nice to see HopTo on the exhibition floor for the first time. The company is a spin-off from the Robotics and Intelligent Systems Lab at CityU Hong Kong, which published a Science Robotics paper on the hopcopter concept that used a Crazyflie. We also had the chance to catch up with a maintainer of CrazySim, an open-source simulator in the Crazyflie ecosystem. It’s always valuable to connect with people building on top of the platform, whether through research, hardware, or open-source tools.
Wrapping Up
ICRA 2025 was packed with activity. From demoing the swarm, to the workshop, to hallway conversations, it gave us a lot of valuable feedback and insight. Thanks to everyone who stopped by, joined a talk, or came to say hello.
The ability to attach expansion decks to the Crazyflie platforms without modifying their electronics allows experimenting with different hardware components. Most existing decks contain different types of sensors that are used for positioning and collecting data. On this Fun Friday project that has been running for the past couple of months, I explored adding mechanical principles to the Crazyflie with the long-term goal to create a working claw to grab and transfer objects.
The claw
The claw mechanism is built on a DC motor. The motor shaft is connected to a worm gear, which drives the claw to open or close depending on the direction of rotation. All the parts are 3D printed and designed from scratch.
The deck
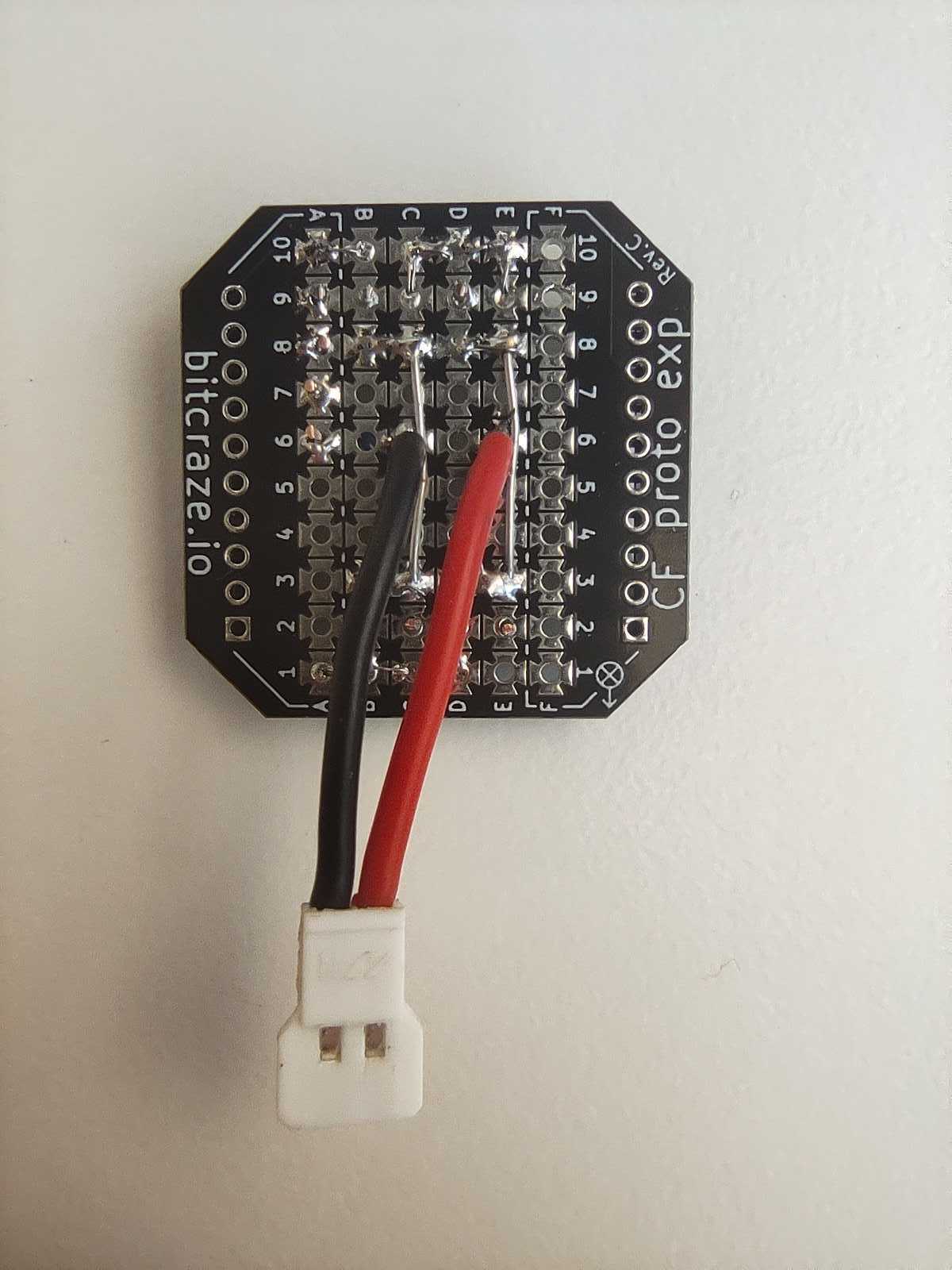
Making the DC motor rotate in both directions requires reversing its polarity, which can be done using an H-bridge. So, the deck controlling the claw, is essentially an H-bridge that uses VCC 3V, GND and 4 GPIO pins on the Crazyflie. This way it can be compatible with the Lighthouse positioning deck. The circuit consists of 4 Mosfets (2 P-type and 2 N-type) and 2 pull-down resistors.
How it works
When designing a custom deck for the Crazyflie, you need to initialize it with its own drivers. The drivers for the H-bridge deck contain 2 basic functions; the one that opens the claw and the one that closes it. They are triggered using 2 float parameters (clawOpen and clawClose), and remain active for the number of milliseconds specified by the value of each parameter.
Experiments
Since the entire claw setup weighs 29g, I used 2 Crazyflie 2.1 Brushless drones, to equally share the weight, while one of them controls the claw. Together, they can lift up to 74g. A fishing line is attached underneath each drone and the claw can slide along it, keeping it always centered between them. For the load, I used a Crazyflie 2.1+ with a lighthouse deck attached and its motors removed, to reduce its weight. When the script starts, the initial positions are collected and a flight sequence for the swarm is created based on them. Then, the swarm takes off and approaches, grabs, lifts and transfers the load.
Next steps
The initial goal of grasping and transferring objects with a flying claw has been achieved. However, in the future I plan to make the system more robust and easy to use. Some points that I might focus on:
Making the whole setup lighter – replace the current motor with a lighter one, print with lighter materials.
Improve the controller tuning to damp the oscillations and make the flight more stable.
Implement a control system to keep track of the claw’s state – add limit switches.
Imagine a drone that can fly indefinitely, autonomously recharging and navigating its environment with minimal human intervention. For corporate innovators designing proof of concept solutions or researchers seeking to push the boundaries of autonomous systems, Bitcraze’s Infinite Flight project represents a novel opportunity.
Since Bitcraze first introduced the “Infinite Flight” concept in 2023, the idea of a Crazyflie drone that can operate for days, autonomously recharging and executing missions, has steadily moved from experiment to practical tool. For those working in robotics, automation, or research, this is a quick update on what’s changed and why it matters.
What’s Changed Since the last Infinite Flight?
Hardware and Firmware Improvements
Crazyflie 2.1 Brushless now features improved power efficiency and longer flight times, which is essential for multi-day operation.
Charging Dock Upgrades: The move from Qi wireless to contact-based charging has made energy transfer more reliable and reduced cycle downtime.
Firmware Stability: The latest firmware (2025.02) brings fixes for brushless ESC flashing, improved default parameters, and more robust long-duration performance.
Host Software: The cfclient now uses PyQt6 for better graphical performance, and cflib’s new full-state setpoints offer more precise control.
Navigation and Autonomy
Recent work on visual route following enables Crazyflie to retrace long paths using snapshot-based visual homing, reducing drift even on resource-constrained hardware.
The autopilot’s app layer now makes it easier to implement custom, persistent behaviors without deep firmware changes.
Real-World Applications of Infinite Flight
Research and Industry Applications
Environmental Monitoring: Continuous data collection for air quality or wildlife studies, where drones need to operate for days at a time.
Industrial Inspections: Persistent monitoring of infrastructure like wind farms or power grids, reducing the need for human intervention.
Swarm and Formation Flight Research: Some labs are using Crazyflie to simulate spacecraft formation flying or to test swarm coordination algorithms over long durations.
Route Following: The new visual homing approach allows for reliable, repeatable long-range missions, which is especially valuable for mapping or inspection tasks.
Why Infinite Flight Matters
Long-duration, autonomous operation is a key enabler for real-world robotics. The recent hardware and software updates make Crazyflie a more practical platform for those kinds of experiments-whether you’re working on persistent autonomy, adaptive navigation, or multi-agent systems.
If you’re experimenting with similar ideas or have a use case that could benefit from multi-day drone operation, it might be worth a look at the latest Infinite Flight developments. As always, feedback and collaboration from the community are welcome.
Start your Infinite Flight Now
Ready to experience the power of uninterrupted autonomous flight? The Infinite Flight Bundle equips you with all the essential tools to keep your Crazyflie 2.1 Brushless airborne around the clock.
The package leverages the Lighthouse positioning system, providing precise on-board tracking across a 5x5x2 meter area. With accuracy reaching below 10 cm and minimal jitter, your drone can safely navigate its flight path while autonomously docking on a charging pad. Once recharged, it’s ready to lift off again—enabling continuous flight operations without manual intervention.
There has been some extended work lately related to the Lighthouse positioning system. The goal of this work is to expand the maximum base station number to 16 enabling the system to cover larger areas and support more complex use cases.
Previous work
One previous attempt to enable multiple base stations using the current lighthouse deck left us with a highly untested “hacky” solution. After flashing the Crazyflie with the proper firmware, this solution requires to strategically position the base stations so that no more than 4 are visible at any given time. Then, the geometry estimation that is normally carried out by the cfclient has to be done through the multi_bs_geometry_estimation.py script in the cflib.
Last year we developed a prototype deck, used in last year’s holiday video, that had a bigger FPGA to receive the lighthouse signals and an esp32 to be able to decode and filter most of the lighthouse pulses onboard the deck. This approach ended up not working for us since it still included the moderately-hard-to-develop FPGA and the algorithm we implemented in the esp32 to identify lighthouse V2 pulses happened to be not fast enough to handle enough base stations.
Current limitations
A key factor that currently limits the maximum number of usable base stations is the Lighthouse deck which can’t handle more than 4 visible base stations at a time. Additionally, the Crazyflie’s STM32 is doing all the filtering and 16 base stations generate so much data that it would exceed the compute and memory budget we have in the Crazyflie. This was one of the main reasons to add a MCU in the deck of our last-year prototype.
Ongoing progress
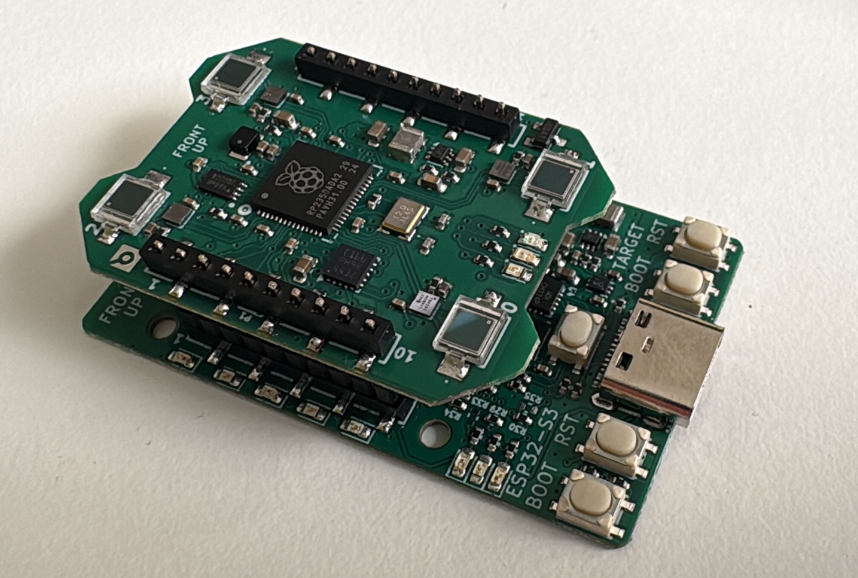
The last couple of months we have redesigned a new LH-16 deck containing a RP2350 microcontroller so that part of the computation and filtering can take place on the deck, rather than on the Crazyflie. With a deck like this, it should be possible to receive large amounts of data from the base stations and filter some of it out to finally estimate the Crazyflie’s position in the Crazyflie’s STM32.
This deck has been designed to run a firmware developed by Said Alvarado-Marin from the AIO team at Inria in Paris. This firmware is able to acquire, decode and identify the FM1-encoded LFSR data stream we get from the base stations without the help of an FPGA or a big look-up table. This allows to greatly simplify the hardware and software by using only one microcontroller on the deck.
We are currently bringing-up the prototype and hope to be able to soon fly in our lab with 16 base stations. We will also be looking at making a standalone lighthouse receiver for other robots and applications. For the curious: the board under the deck in the picture in a debug board that contains everything we might need for making a standalone receiver plus everything needed to bring-up and debug the deck until we have it ready to fly.
It’s been 2 weeks ago that we went to ROSCon ’24 in Odense Denmark as exhibitor and silver sponsor! Since it was a 2-hour train ride for us, it made much sense for us to attend this as a company and we are very happy we did. In this blog post we are sharing our experiences of the event.
The Booth Build-up and Demo
We made some changes to our well-known cage that is a must at every conference we have exhibited. Usually, it would take us a good few hours just to set up the cage alone, but we have improved the corners which improved our build-up experience quite a lot and we were done within an hour! Just in time for us to join the tours and bird of feather sessions with no stress!
All done before 11 am!
For ROSCon we prepared a more ROSflavored demo that enabled full demo control from ROS, which was based on the swarming mapping demo shown in this tutorial and the robotics developer day (see this video). Here we already hit a couple of issues that all had to do with the differences between demos for exhibitions versus one-time talk demos (see OpenCV! Live episode where we talked about demo driven development). We switched back to our usual fully decentralized autonomous swarm demo (see this blog post). Luckily, the Crazyflie could still communicate at the same time to give through the multiranger values, such that the computer could still generate the Swarm merging map while the Crazyflies were flying around avoiding each other.
Exhibition Booth
Tuesday and Wednesday were the actually exhibition days so that is when we talked with most of the people. It was a bit slow in the beginning as we were located at the end of the hall, but luckily the ROSCon passport game motivated people to go by each of the booth to get a stamp. We went a bit rogue and made our own much bigger stamp ;) but luckily it still fit as long as we aligned properly. We donated a STEM Ranging bundle as one of the prizes to congratulate whoever won this! And now they can try out this ROS tutorial ;)
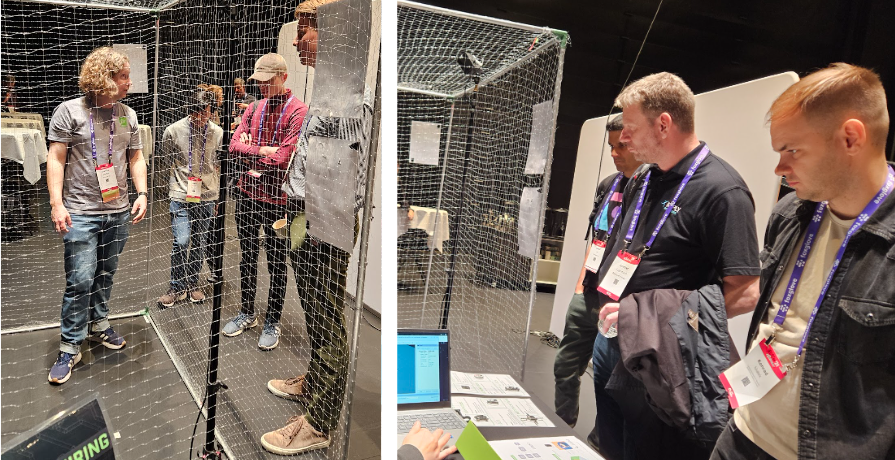
Talking to people outside and inside the cage
We noticed that the Crazyflie Brushless got a lot of attention. The ability to carry more than a regular Crazyflie seemed of great interest to many of the ROSCon attendees. Moreover, the prototype of the forward-facing expansion connector (a.k.a. the Camera deck) was also a well-requested feature of the Crazyflie and has solidified our belief that the community needs something like this as well. In general, the lighthouse positioning system and the stand-alone lighthouse node were also quite well received. Luckily we were able to forward people to our accepted talk about the Lighthouse position system on Thursday
Lighthouse Positioning Talk
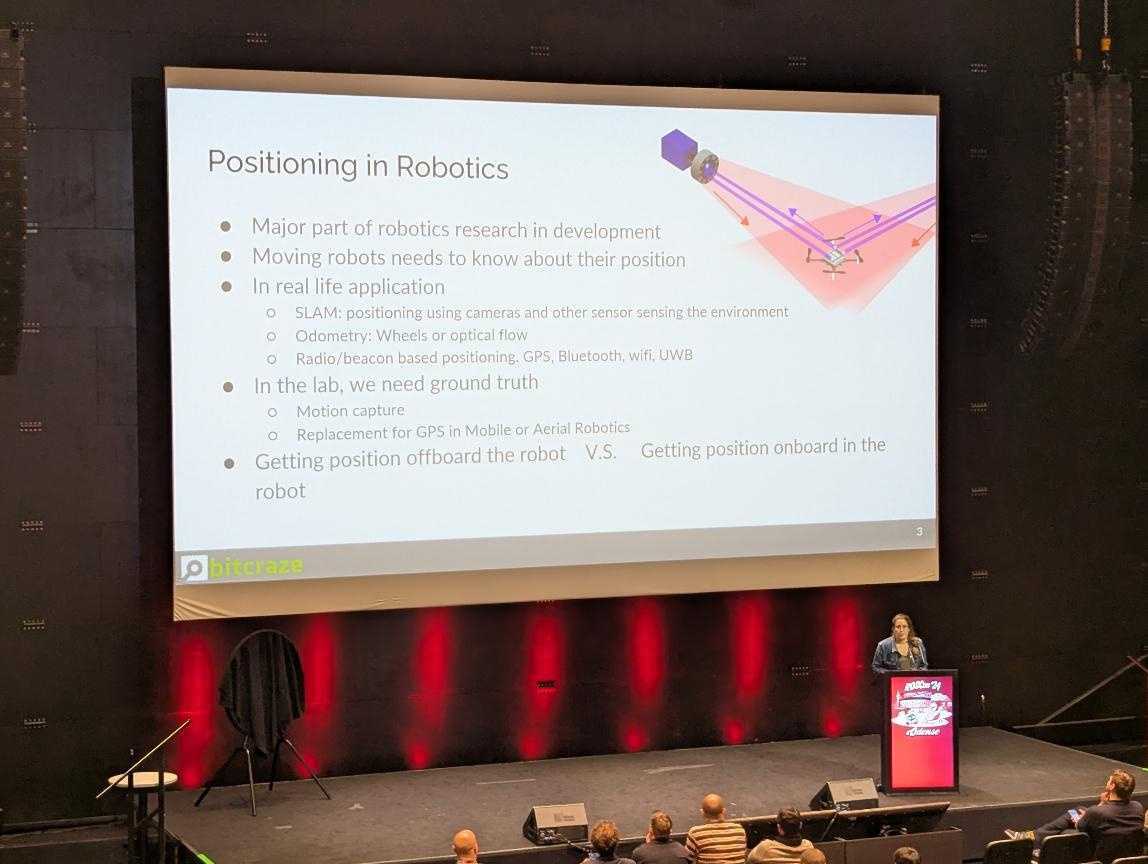
One of the reasons we were present at ROSCon 2024 was to gauge the interest of the general robotics community in the lighthouse positioning system. We have been using it for years for the Crazyflies, but we’d like to also evangelize its submillimeter and cost-effective awesomeness for any other platform. And there seems to be quite some interest for it! We gave a short presentation on Thursday Afternoon during the ‘ROS Tooling & Testing’ session (we will share the recording once it becomes available).
Talk about Lighthouse Positioning – Taken by Dharini Dutia from Women in Robotics
We also send out some polls just to see what kind of positioning systems are used and for what purpose. It was evident that there are many outdoor roboticists that also use onboard-sensing based state-estimation like SLAM, but there was still a significant portion of people that used indoor positioning systems for the actual positioning replacement and/or Ground truth. And also we got some valuable feedback, like if it would still work out with a Lidar or Kinect, or if it is suitable for a 12-meter size robot (wow). We will take this all in for improvements for any new upgrades to the lighthouse deck and stand-alone nodes for it. Thanks to you all for providing all the feedback and the interest!
Side-events
We also attended a couple of events related to ROSCon 2024. Marcus and Kimberly both attended tours of Odense Robotics, Universal robots and Teradyne facilities. The tour of the SDU Drone Center was particularly impressive. Moreover, we also attended the Aerial Robotics Meetup, who attracted about 90-100 people at the max, with drinks and snacks provided by Dronecode Foundation. It was great to see such a big aerial presence at ROSCon. There was also the Karaoke meetup, the ROSCon afterparty by Odense Robotics with a beer-serving robot arm, the Women in Robotics lunch… there was just too much to attend to but it all was a great success!
Check out the ROSCon 2024 event page on our website of what we have shown at ROSCon 2024 and see more information about the demos/products we had there.
We have some very busy weeks behind us and ahead! As we are working hard on releasing the new CF Brushless, we have been preparing for the upcoming ROSCon in Odense Denmark next week (see this previous blogpost) and we also featured on the latest OpenCV live episode as well! So more about both in this blogpost.
OpenCV Live! Demo Driven Development
We were featured as guests on the latest OpenCV Live! episode hosted by Phil Nelson and Satya Mallick, where we went through a bit of the history of the start of Bitcraze and all of the (crazy) demos done with the Crazyflie in the last decade. We have done a similar topic for our latest developer meeting, but for this episode we put the focus more on vision based demos, since OpenCV has been definitely used in the past at Bitcraze for various reasons! Just type in OpenCV in the top right search barto check out any of the blogs we have written.
During the OpenCV live episode of the 10th of October, Arnaud and Kimberly told the backstories of these demos that went from a manual flight fail where Arnaud flew the Crazyflie 1.0 in Marcus’ hair, using OpenCV and Aruco markers for positioning to flying a swarm in your kitchen. It was really fun to do and alos one lucky listener managed to answer the two questions the host Phil asked at the end, namely “Where does the name Crazyflie come from?” and “Why is the last part (‘-flie’) spelled this way?” and won a STEM ranging bundle. If you’d like to know the answers, go and watch the latest OpenCV! Live episode ;) Enjoy!
ROSCon – What to expect?
So next week we will be present as Silver Sponsor at ROSCon Odense, namely on Monday 21th and Wednesday 23rd of October. The Bitcraze booth will be located on number 21 so that should be near the coffee break place! We will have are old trusty cage with some upgrades with a nice ROS demo which is similar to the one explained in this Crazyflie ROS tutorial we have written a while ago, but then the swarming variant of it. We also hope to show a Brushless Crazyflie Prototype, and a new camera deck prototype, along with anything else we can find lying around at our office :D.
Moreover, Arnaud will be given a presentation on the lighthouse positioning system, namely at Wednesday 23rd of October 14:40 (2:30 pm) called ‘The Lighthouse project: from Virtual Reality to Onboard Positioning for Robotics’. The lighthouse positioning system will also be the system that we will demo at our booth so if you’d like to see it for yourself, or perhaps (during downtime) hack around together with us, you are more than welcome to do so! Check out the Bitcraze ROSCon Eventpage for more details about our demo or the hardware we will show.
Whenever we show the Crazyflie at our booth at various robotics conferences (like the recent ICRA Yokohama), we sometimes get comments like ‘ahh that’s cute’ or ‘that’s a fun toy!’. Those who have been working with it for their research know differently, but it seems that the general robotics crowd needs a little bit more… convincing! Disregarding its size, the Crazyflie is a great tool that enables users to do many awesome things in various areas of robotics, such as swarm robotics and autonomy, for both research and education.
We will be showing that off by giving a live tutorial and demonstration at the Robotics Developer Day 2024, which is organized by The Construct and will take place this Friday, 5th of July. We have a discount code for you to use if you want to get a ticket; scroll down for details. The code can be used until 12 am midnight (CEST) on the 2nd of July.
The Construct and Robotics Developer Day 2024
So a bit of background information: The Construct is an online platform that offers various courses and curriculums to teach robotics and ROS to their users. Along with that, they also organize all kinds of live training sessions and events like the Robotics Developer Day and the ROS Awards. Unfortunately, the deadline for voting in the latter has passed, but hopefully in the future, the Crazyflie might get an award of its own!
What stands out about the platform is its implementation of web-based virtual machines, called ‘ROSJects,’ where ROS and everything needed for it is already set up from the start. Anyone who has worked with ROS(2) before knows that it can be a pain to switch between different versions of ROS and Gazebo, so this feature allows users to keep those projects separate. For the ROS Developer Day, there will be about five live skill-learning sessions where a ROSject is already preconfigured and set up for the attendees, enabling them to try the tutorial simultaneously as the teacher or speaker explains the framework.
Skill learning session with the Crazyflie
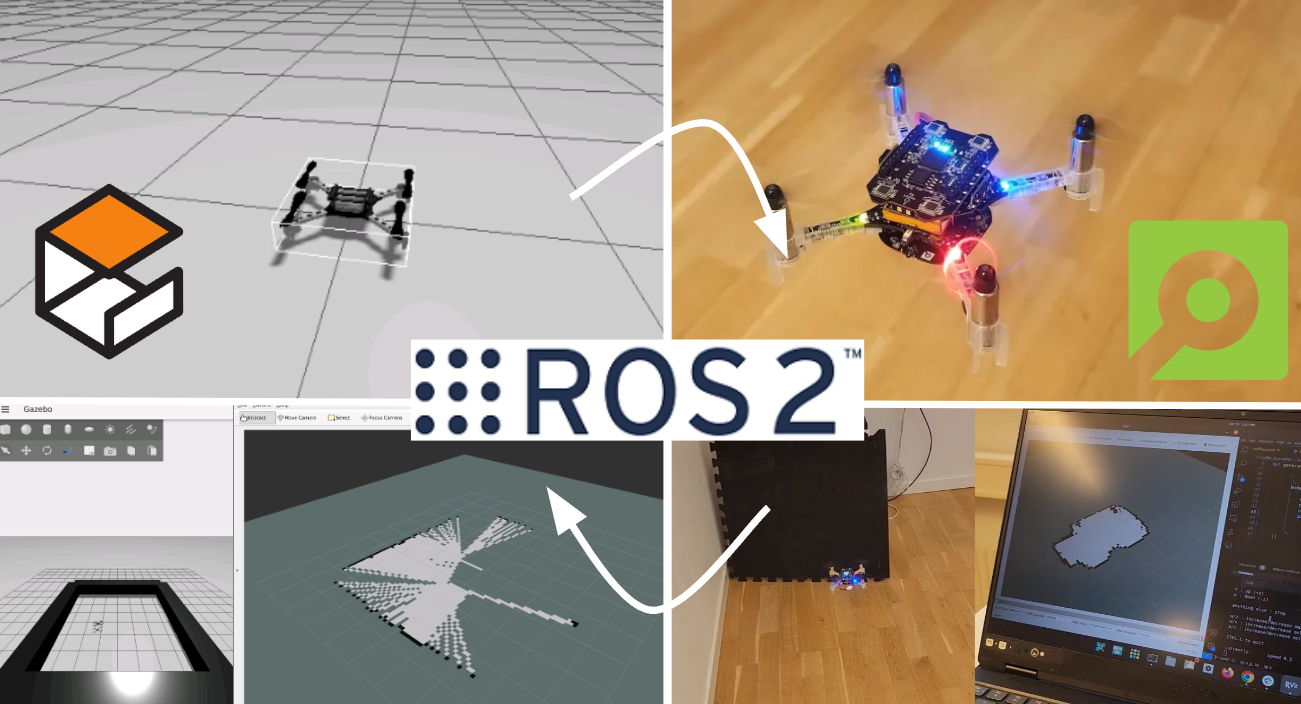
One of the earlier mentioned skill learning sessions is, of course, one with the Crazyflie! The title is “ROS 2 with a Tiny Quadcopter,” and it is currently planned to be the first skill learning session of the event, scheduled at 15:15 (3:15 pm) CEST. The talk will emphasize the use of simulation in the development process with aerial robotics and iterating between the real platform and the simulated one. We will demonstrate this with a Crazyflie 2.1 equipped with a Lighthouse deck and a Multi-ranger deck. Moreover, it will also use a Qi-charging deck on a charging platform while it patiently waits for its turn :D
What we will be showing is a simple implementation of a mapping algorithm made specifically for the Crazyflie’s Multiranger deck, which we have demonstrated before at ROSCon Kyoto and in the Crazyswarm2 tutorials. What is especially different this time is that we are using Gazebo for the simulation parts, which required some skill learning on our side as we have been used to Webots over the last couple of years (see our tutorial for that). You can find the files for the simulation part in this repository, but we do advise you to follow the session first.
You can, if you want, follow along with the tutorial using a Crazyflie yourself. If you have a Crazyflie, Crazyradio, and a positioning deck (preferably Lighthouse positioning, but a Flowdeck would work as well), you can try out the real-platform part of this tutorial. You will need to install Crazyswarm2 on a separate Ubuntu machine and add a robot in your ROSject as preparation. However, this is entirely optional, and it might distract you from the cool demos we are planning to show, so perhaps you can try this as a recap after the actual skill learning session ;).
Here is a teaser of what the final stage of the tutorial will look like:
Win a lighthouse explorer bundle and a Hands-On Pass discount
We are also sponsors of the event and have agreed with The Construct to award one of the participants a Crazyflie if they win any contest. Specifically, we will be awarding a Lighthouse Explorer bundle, with a Qi deck and a custom-made charging pad similar to the ones we show at fairs like ICRA this year. So make sure to participate in the contests during the day for a chance to win this or any of the other prizes they have!
It is possible to follow the event for free, but if you’d like to participate with the ROSjects, you’ll need to get a hands-on pass. If you haven’t yet gotten a hands-on ticket for the Robotics Developer Day, please use our 50% off discount code:
On a side note, we will be at the Robotics: Science and Systems Conference in Delft from July 15th to 19th, 2024—just about two weeks from now. We won’t have a booth as we usually do, but we will be co-organizing a half-day workshop titled Aerial Swarm Tools and Applications (more details on this website).
We will be organizing this workshop together with our collaborators at Crazyswarm2, as well as the developers of CrazyChoir and Aerostack2. We’re excited to showcase demos of these frameworks with a bunch of actual Crazyflies during the workshop, if the demo gods are on our side :D. We will also have great speakers, including: SiQi Zhou (TU Munich), Martin Saska (Czech Technical University), Sabine Hauert (University of Bristol), and Gábor Vásárhelyi (Collmot/Eötvös University).