Modular robots can adapt and offer solutions in emergency scenarios, but self-assembling on the ground is a slow process. What about self-assembling in midair?
In one of our recent work in GRASP Laboratory at University of Pennsylvania, we introduce ModQuad, a novel flying modular robotic structure that is able to self-assemble in midair and cooperatively fly. This work is directed by Professor Vijay Kumar and Professor Mark Yim. We are focused on developing bio-inspired techniques for Flying Modular Robots. Our main interest is to develop algorithms and controllers for self-assembling modular robots that can dock in midair.

In biological systems such as ant or bee colonies, collective effort can solve problems not efficient with individuals such as exploring, transporting food and building massive structures. Some ant species are able to build living bridges by clinging to one another and span the gaps in the foraging trail. This capability allows them to rapidly connect disjoint areas in order to transport food and resources to their colonies. Recent works in robotics have been focusing on using swarm behaviors to solve collective tasks such as construction and transportation.Docking modules in midair offers an advantage in terms of speed during the assembly process. For example, in a building on fire, the individual modules can rapidly navigate from a base-station to the target through cluttered environments. Then, they can assemble bridges or platforms near windows in the building to offer alternative exits to save lives.
ModQuad Design
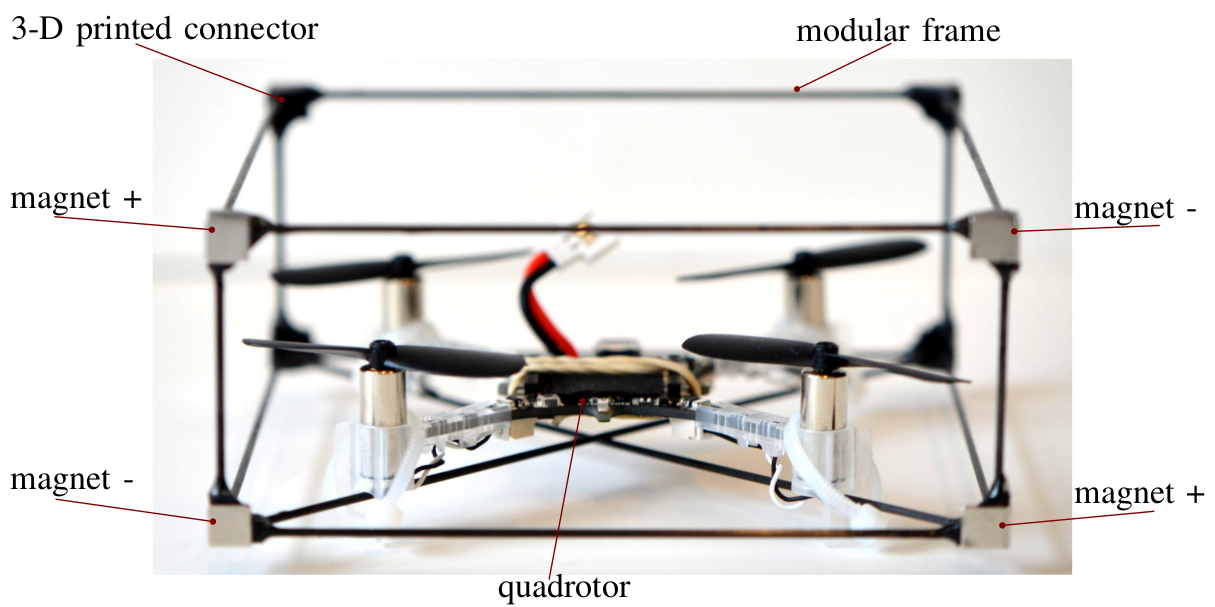
The ModQuad is propelled by a quadrotor platform. We use the Crazyflie 2.0. The vehicle was chosen because of its agility and scalability. The low-cost and total payload gives us an acceptable scenario for a large number of modules.
Very light-weight carbon fiber rods connected by eight 3-D printed ABS connectors form the frame. The frame weight is important due to tight payload constraints of the quadrotor. Our current frame design weighs 7g about half the payload capability. The module geometry has a cuboid shape as seen in the figure below. To enable rigid attachments between modules, we include a docking mechanism in the modular frame. In our case, we used Neodymium Iron Boron (NdFeB) magnets as passive actuators.
Self-Assembling and Cooperative Flying
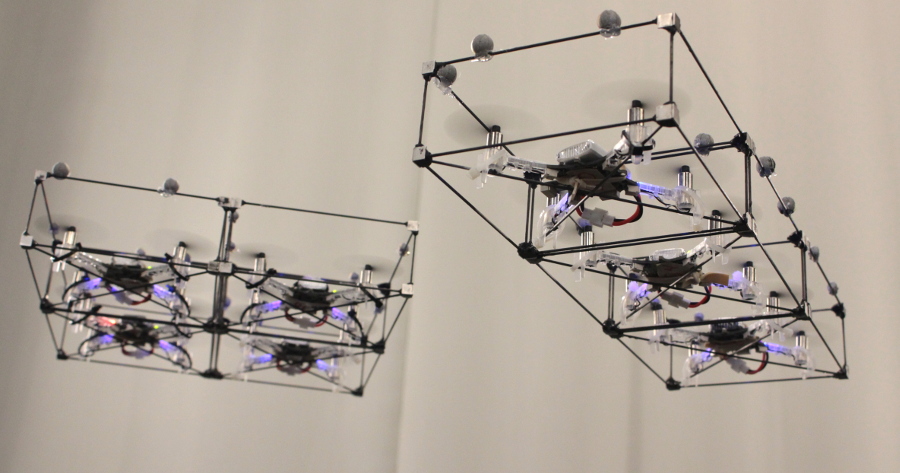
ModQuad is the first modular system that is able to self-assemble in midair. We developed a docking method that accurately aligns and attaches pairs of flying structures in midair. We also designed a stable decentralized modular attitude controller to allow a set of attached modules to cooperatively fly. Our controller maximizes the use of the rotor forces by generating the maximum possible moment.
In order to allow the flying structure to navigate in a three dimensional environment, we control thrust and attitude to generate vertical and horizontal translations, and rotation in the yaw angle. In our approach, we control the attitude of the structure in a decentralized manner. A modular attitude controller allows multiple connected robots to stably and cooperatively fly. The gain constants in our controller do not need to be re-tuned as the configurations change.
In order to dock pairs of flying structures in midair, we propose to have two flying structures: the first one is hovering and waiting, meanwhile the second one is performing a docking action. Both, the hovering and the docking actions are based on a velocity controller. Using a velocity controller, we are able to dock multiple robots in midair. We highlight that docking robots in midair is one of the fastest ways to assemble structures because the building units can rapidly move and dock in three dimensional environments. The docking system and control has been validated through multiple experiments.
Our system takes advantage of robot swarms because a large number of robots can construct massive structures.

This work was developed by:
David Saldaña, Bruno Gabrich, Guanrui Li, Mak Yim, and Vijay Kumar.
Additional resources at: