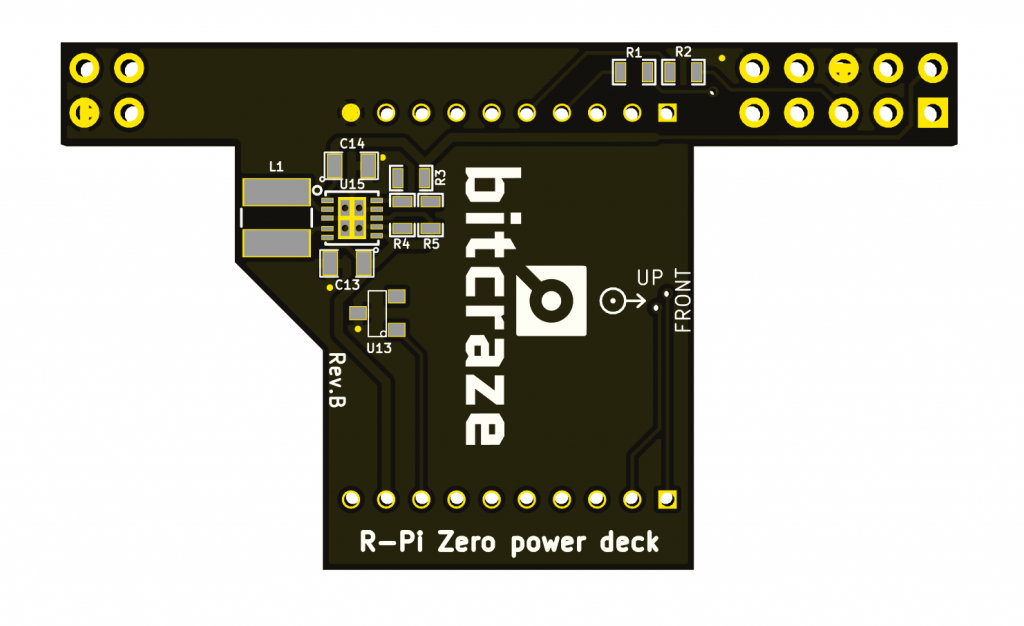
Ever since the Raspberry-pi zero was released we wanted to find-out what it would take to fly one with the Crazyflie 2.0. One immediate issue is the size and weight of the R-Pi-Zero. It is just a bit to big and heavy to make it work without modifying the Crazyflie 2.0. Also it requires 5V power which is something the Crazyflie 2.0 doesn’t provide if USB isn’t connected. Actually the R-Pi-Zero works well down to ~3.6V but this is still too high to reliably run directly from a single LiPo cell. So to begin with we created a Raspberry Pi Zero power deck. It is reusing the same step-up/step-down (STBB1) as used on the LED-ring to make things simple and the output is set to 3.8V. Other than that the UART and the I2C interfaced has been connected so that the raspberry pi zero could control the Crazyflie.
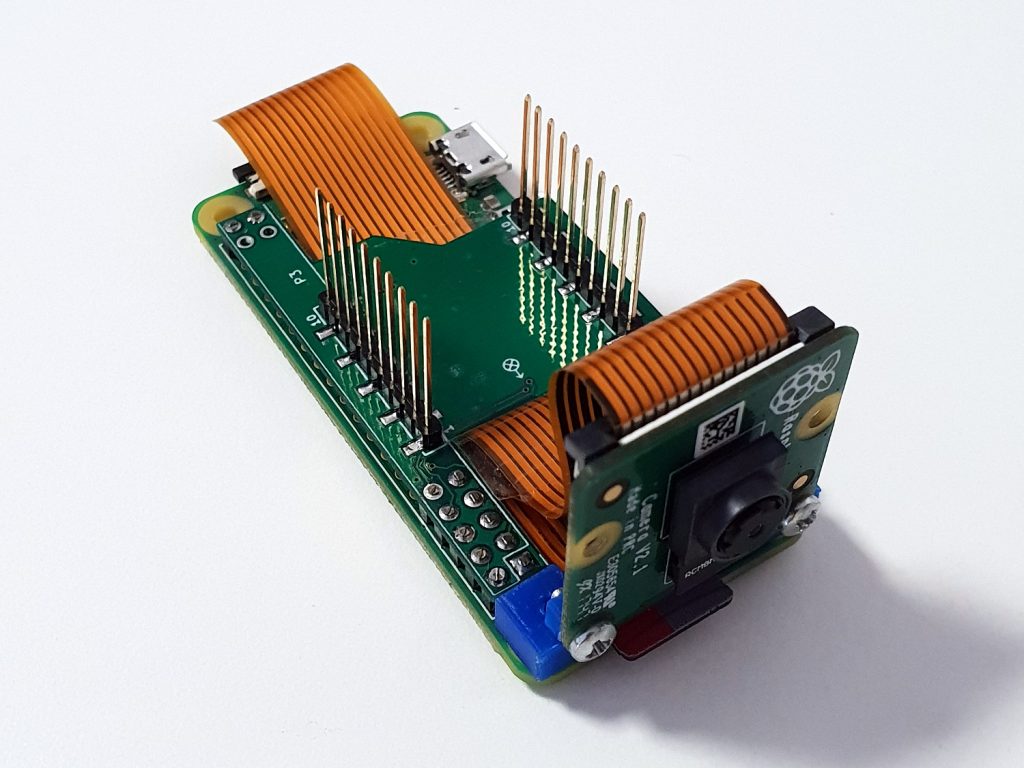
The raspberry pi zero would then be soldered to the deck with 0.1″ header pins. The result can be seen below and the power part works well. We chose to solder the deck header pins to the deck, instead of using the female deck connectors, to make it more sturdy. Another thing we did was fitting a Pi-camera using a 3D printed mounting bracket we designed. We think this is one of the interesting use cases, to run computer vision or maybe neural networks :-).
Well unfortunately this only solves the first part, powering the R-Pi-Zero from the Crazyflie 2.0. Next step will be to modify the Crazyflie 2.0 with bigger motors/props so that is can carry it for a decent time. So story to be continued…
Is this deck available for purchase?
Thank you
Hi Rodrigo,
Unfortunately the deck is not available for purchase yet. The best estimate I can give is possibly during the spring of 2019.
Hi Guys
Just a tip for you guys, there’s an ESP32 with Camera and able to stream video (WiFi) and run some machine learning algorithm on board
Demo video:
https://www.youtube.com/watch?v=MicAM_A0_lU
One of the variants:
https://github.com/m5stack/m5stack-cam-psram
Perhaps we could interface the camera directly, or turn something like the ESP32 in to a deck?
We have seen this and it is pretty interesting. Thanks for sharing! First out will be the AI-deck with the GAP8 MCU, and that deck will also have a ESP32 :-).
Any release deck yet?
Any release date I mean. :-)
Unfortunately not. This has been put on hold in favor of the AI-deck. But now we know there are some interest for it, then a higher chance for it to get released.
Any update on this