Today, we welcome Dimitrios Chaikalis from New York University to talk about their project of cooperative flight. Enjoy!
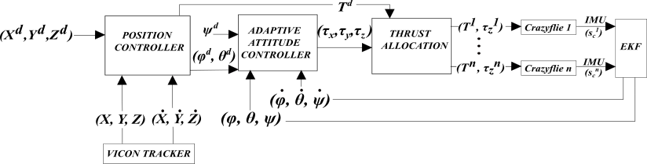
For our work in cooperative flight, we developed controllers for many tightly coupled drones to fly as a unit. The idea is that, either in a centralized or decentralized manner, it should be possible to treat drones as thrust force and yaw moment modules, in order to allow many small drones to carry objects too heavy for a single one to lift.
It quickly turned out that the Crazyflies, with their small size, open-source firmware, ROS compatibility, and, as we happily found out after hours upon hours of crashes, amazing durability, would be the perfect platform to test our controllers.
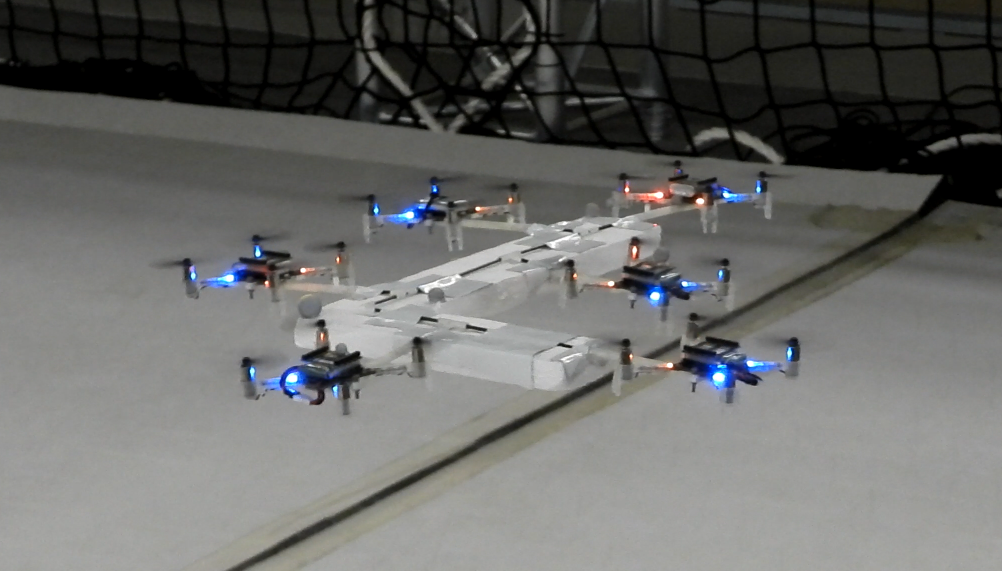
We designed and 3D-printed very lightweight, hollow connecting rods that could latch onto Crazyflies on one side, along with a number of lightweight polygons such as squares and hexagons with housings for the other side of the rods on all their faces. This allowed us to seamlessly change between geometric configurations and test our controllers.
We first tested with some symmetric triangle and quad formations.
Eventually, to make the controller generic, we developed a simple script that could deduce with some accuracy the placement of drones given a small lexicographic description submitted by the tester as a string, essentially denoting a sequence of rods and polygons utilized in the current configuration. Of course, some parameters such as rod lengths, or additional weights that we added to the system (such as a piece of foam attached to the structure), could not be known in advance, but the adaptive controller design ensured that the overall system could still achieve stable flight.
We also proved that with more than 3 drones in a configuration, we could optimize the thrusts of the agents such that additional performance criteria could be met. For example, in an asymmetric configuration of 5 drones, one of them had a significantly more depleted battery. Crazyflies provide real-time battery voltage feedback, so we were able to use that in an optimization node running in Matlab on a ground computer, choosing thrust levels such that the depleted agent could be utilized less. This was a significant help, because in many of those experiments, the Crazyflies had to operate at more than 80% of their thrust capacity, so battery life optimization was of the essence.
We used ROS for all the code written for the above implementations, using the Crazyflie-ROS package in order to get battery and IMU readings from all drones and provide thrust and roll, pitch, and yaw rate commands at up to 100Hz.
The corresponding publication can be found here: https://link.springer.com/article/10.1007/s10846-023-01842-1
In case you want to build on our work, you can cite the above paper as such:
D. Chaikalis, N. Evangeliou, A. Tzes, F. Khorrami, ‘Modular Multi-Copter Structure Control for Cooperative Aerial Cargo Transportation‘, Journal of Intelligent & Robotic Systems, 108(2), 31.
YouTube Link: https://www.youtube.com/watch?v=nA41uJIehH8&t=1s