Approximately two month ago we wrote a blog post presenting our planned master thesis. Time flies and we have now reached a sufficient state where the results are presentable and possible to use. We have used the Renode framework and created a platform for the Crazyflie 2.1. In Bitcraze’s Github repository there now is a Renode fork with a custom Renode-infrastructure submodule. To get Renode up and running on your computer check the README found there.
On the Renode branch crazyflie there are two new REPL (Renode platform) files describing the platform. An example of the syntax is given below.
// I am a comment
peripheralname: Namespace.ClassName @ parent 0x08000000
numericConstructorField: 0x100000
stringConstructorField: "template"
Interrupt -> interrupthandler@3
In the cf2.repl all the external peripherals are connected while the stm32f405.repl contains the STM32F405 peripherals. Note that only the peripherals used by the current Crazyflie 2.1 have been added since they are the only ones that can be tested using the Crazyflie firmware.
When running Renode a RESC (Renode script) file is loaded. There are currently two RESC files for the Crazyflie, one that only loads the Crazyflie plattform and one that can be used for testing. The one for testing automatically starts the simulation and it also has a hook to exit Renode once the self test has passed.
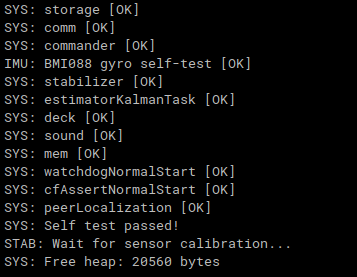
As mentioned, Renode is usable both for automatically and interactively testing firmware. The current version of automatic testing is based on the firmware passing the self test. The plan is to incorporate this in the CI pipeline.
When used interactively it is possible to pause the emulation whenever the user wants to, either manually via a Renode command or by connecting to GDB. This allows reading (as well as writing to) memory addresses. Want to read the DMA status at a specific line of code or mess with the system by randomly flipping bits? Doable in the emulator without risking your Crazyflie crashing.
In the platform there also are our customized sensors to which data can be loaded. The data can be loaded either manually or via a file and then sent to the STM32. The scope of this master thesis however has been on firmware testing, not getting a simulated Crazyflie to fly in a virtual environment.
Emulation of hardware is not a trivial task, there are still improvements to be made and the everlasting question whether the emulation actually represents the real system.
One of the Crazyflie features that had to be simplified was the syslink and connection to the nRF microcontroller, which in the emulation simply sends messages back to the STM32. The most exciting part about it currently is how the STM32 receives a signal that no expansion decks are connected via the 1-wire when a scan is executed. Further improvements would be to emulate the radio, power management and support expansion decks, either via an external program or through Renode.
Of course there are other things to improve as well, there will always be someone who thinks of better ways to implement features and only time will tell how this emulator is going to evolve.
Josefine & Max
