This week we have a guest blog post from CollMot about their work to integrate the Crazyflie with Skybrush. We are happy that they have used the app API that we wrote about a couple of weeks ago, to implement the required firmware extensions!
Bitcraze and CollMot have joined forces to release an indoor drone show management solution using CollMot’s new Skybrush software and Crazyflie firmware and hardware.
CollMot is a drone show provider company from Hungary, founded by a team of researchers with a decade-long expertise in drone swarm science. CollMot offers outdoor drone shows since 2015. Our new product, Skybrush allows users to handle their own fleet-level drone missions and specifically drone shows as smoothly as possible. In joint development with the Bitcraze team we are very excited to extend Skybrush to support indoor drone shows and other fleet missions using the Crazyflie system.
The basic swarm-induced mindset with which we are targeting the integration process is scalability. This includes scalability of communication, error handling, reliability and logistics. Each of these aspects are detailed below through some examples of the challenges we needed to solve together. We hope that besides having an application-specific extension of Crazyflie for entertainment purposes, the base system has also gained many new features during this great cooperative process. But lets dig into the tech details a bit more…
UWB in large spaces with many drones
We have set up a relatively large area (10x20x6 m) with the Loco Positioning System using 8 anchors in a more or less cubic arrangement. Using TWR mode for swarms was out of question as it needs each tag (drone) to communicate with the anchors individually, which is not scalable with fleet size. Initial tests with the UWB system in TDoA2 mode were not very satisfying in terms of accuracy and reliability but as we went deeper into the details we could find out the two main reasons of inaccuracies:
- Two of the anchors have been positioned on the vertical flat faces of some stairs with solid material connection between them that caused many reflections so the relative distance measurements between these two anchors was bi-stable. When we realized that, we raised them a bit and attached them to columns that had an air gap in between, which solved the reflection issue.
- The outlier filter of the TDoA2 mode was not optimal, a single bad packet generated consecutive outliers that opened up the filter too fast. This issue have been solved since then in the Crazyflie firmware after our long-lasting painful investigation with changing a single number from 2 to 3. This is how a reward system works in software development :)
After all, UWB was doing its job quite nicely in both TDoA2 and TDoA3 modes with an accuracy in the 10-20 cm level stably in such a large area, so we could move on to tune the controller of the Crazyflie 2.1 a bit.
Crazyflies with Loco and LED decks
As we prepared the Crazyflie drones for shows, we had the Loco deck attached on top and the LED deck attached to the bottom of the drones, with an extra light bulb to spread light smoothly. This setup resulted in a total weight of 37g. The basic challenge with the controller was that this weight turned out to be too much for the Crazyflie 2.1 system. Hover was at around 60-70% throttle in average, furthermore, there was a substantial difference in the throttle levels needed for individual motors (some in the 70-80% range). The tiny drones did a great job in horizontal motion but as soon as they needed to go up or down with vertical speed above around 0.5 m/s, one of their ESCs saturated and thus the system became unstable and crashed. Interestingly enough, the crash always started with a wobble exactly along the X axis, leading us to think that there was an issue with the positioning system instead of the ESCs. There are two possible solutions for this major problem:
- use less payload, i.e. lighter drones
- use stronger motors
Partially as a consequence of these experiments the Bitcraze team is now experimenting with new stronger models that will be optimized for show use cases as well. We can’t wait to test them!

Optimal controller for high speeds and accurate trajectory following
In general we are not yet very satisfied with any of the implemented controllers using the UWB system for a show use-case. This use-case is special as trajectory following needs to be as accurate as possible both in space and time to avoid collisions and to result in nice synchronized formations, while maximal speed both horizontally and vertically have to be as high as possible to increase the wow-effect of the audience.
- The PID controller has no cutoffs in its outputs and with the sometimes present large positioning errors in the UWB system controller outputs get way too large. If gains are reduced, motion will be sluggish and path is not followed accurately in time.
- The Mellinger and INDI controllers work well only with positioning systems of much better accuracy.
We stuck with the PID controller so far and added velocity feed forward terms, cutoffs in the output and some nonlinearity in case of large errors and it helped a bit, but the solution is not fully satisfying. Hopefully, these modifications might be included in the main firmware soon. However, having a perfect controller with UWB is still an open question, any suggestions are welcome!
Show specific improvements in the firmware
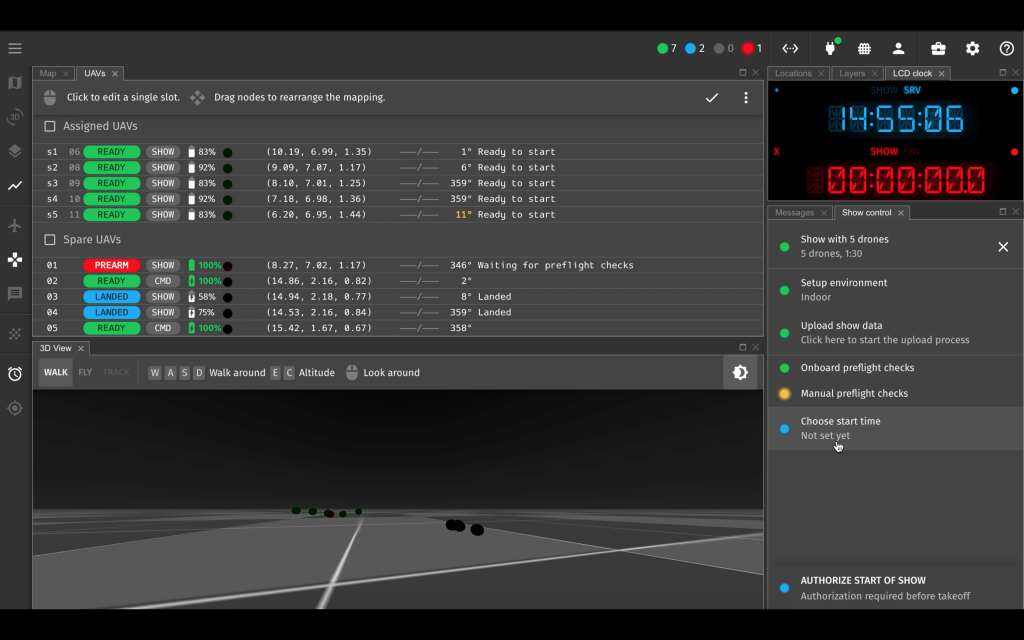
We implemented code that uploads the show content to the drones smoothly, performs automatic preflight checking and displays status with the LED deck to have visual feedback on many drones simultaneously, starts the show on time in synchrony with all swarm members and handles the light program and show trajectory execution of the show.
These modifications are now in our own fork of the Crazyflie firmware and will be rewritten soon into a show app thanks to this new promising possibility in the code framework. As soon as Skybrush and Crazyflie systems will be stable enough to be released together, we will publish the related app code that helps automating show logistics for every user.
Summary
To sum it up, we are very enthusiastic about the Crazyflie system and the great team behind the scenes with very friendly, open and cooperative support. The current stage of Crazyflie + Skybrush integration is as follows:
- New hardware iterations based on the Bolt system that support longer and more dynamic flights are coming;
- a very stable, UWB-compatible controller is still an open question but current possibilities are satisfying for initial tests with light flight dynamics;
- a new Crazyflie app for the drone show case is basically ready to be launched together with the release of Skybrush in the near future.
If you are interested in Skybrush or have any questions related to this integration process, drop us an email or comment below.