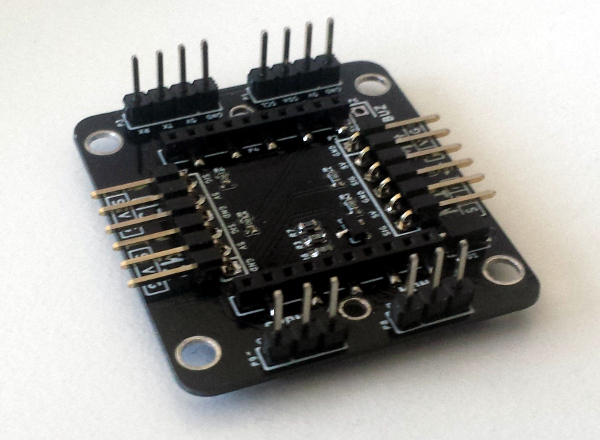
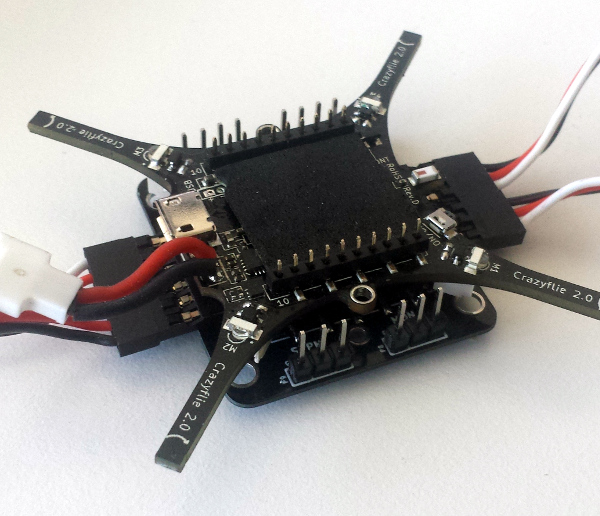
Big Quad Deck
So last week we received the first prototypes of the Big-quad-deck. With this deck it will be possible to transform the small Crazyflie 2.0 into a flight controller of a bigger quad. It does this by using some of the deck port pins to drive brushless motorcontrollers. This has been explained how to do using a prototype board in a previous post. For those that like it to be more convenient the Big-quad-deck will be a good choice. This will also use the one wire memory so that it will automatically detect the big-quad-deck board and configure it, that is the idea at least :-). So currently the dynamic motor driver is one of the things we are working with. Well that and fixing the layout of the board as there was a major mistake of mirroring the deck port connectors… no blaming :-)
iPhone bootloader
The bootloader is finally implemented on iPhone. The change have been pushed to github and will be released before the next firmware release. The GUI is simple and hopefully clear enough:
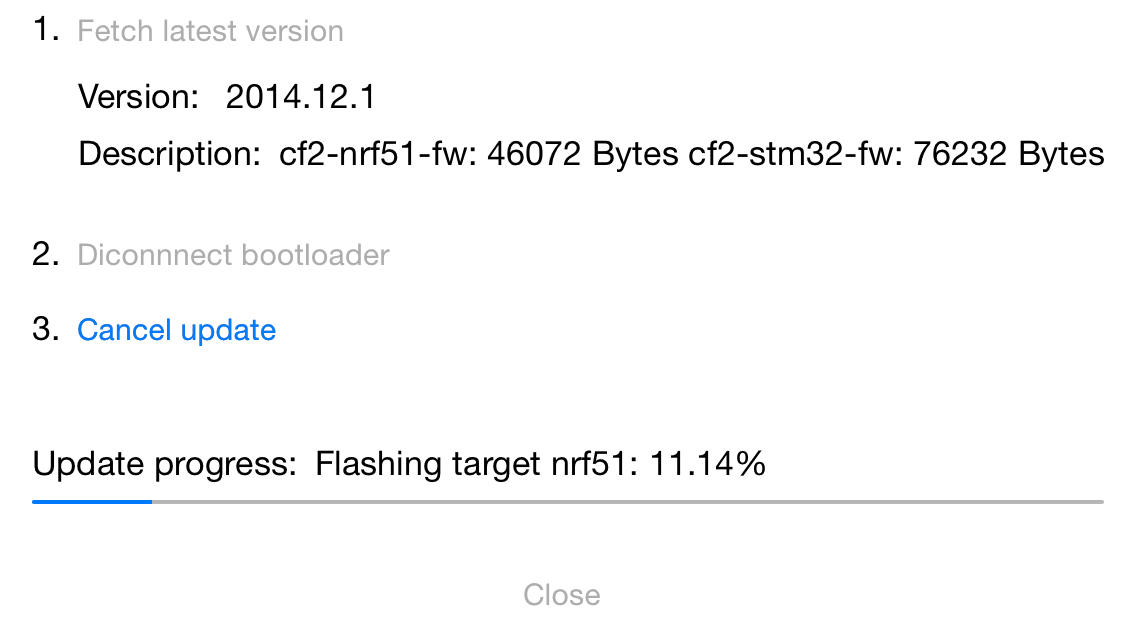
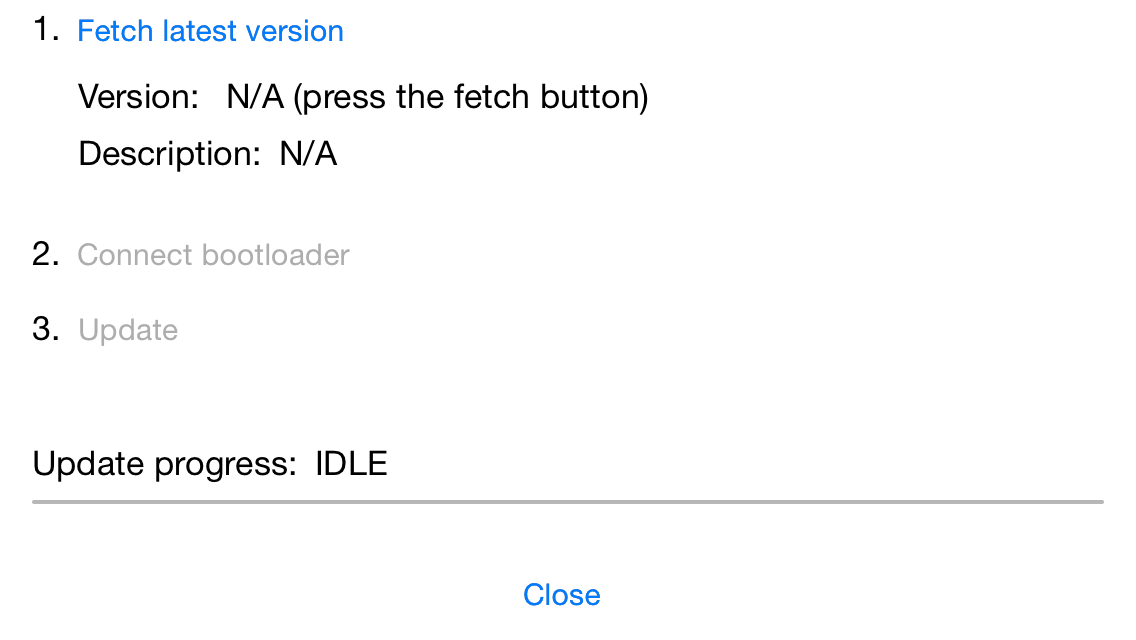
The iOS app fetches the latest firmware directly from GitHub and the flashing operation takes about 10 minutes. All new code written for the app is written in Swift, there is an ongoing work to cleanup the app architecture to make it easier to implement more advanced functionality like log/param. We are actually thinking of converting the full app in Swift to make it easier to work with.
The next step is to implement the bootloader in the Android client, this will be one of our main tasks for next week.
Wow, great update on both points. iOS bootloader is very cool! Amazing work as always guys.
Awesome work on the iOS bootloader! I just cloned the repo, built it, and gave it a try. Works very smoothly albeit a little slowly (nothing you can do about the speed though). Nice job. It’ll be great to read through the code so I can learn some Swift!
Thanks Chad and F Mc.
In theory it could be faster (using Bluetooth write-without-answer…) but I haven’t gotten it to work that way yet.
Swift is really nice! (I have hard time going back to Java now), but be aware that I leaned Swift while writing the app so it might not be all clean (at least the Bootloader is much better than the BluetoothLink, you will see an evolution there).
just a thought…
If you mount the crazyflie on the big quad fully assembled, so that it could detach and fly itself when the big quad had landed somewhere, then you would be able to use the range of the big quad to fly to a distant location and the maneuverability and size of the crazyflie to perform exacting tasks when you get there. You could even use the big quad as a radio relay to base to allow control of the crazyflie out of crazyradio range.
Not sure how you would design the dismount mechanism for the cf, nor the remount to return home.
Keep developing guys :-) – it is an amazing platform. I’ve had so much more fun playing with this nano drone than I would ever had if I’d got myself a parrot / DJI etc.