A we wrote before, we are working on a Ultra-Wide-Band-based local positioning system for the Crazyflie. We are doing slow progress but progress anyway and we wanted to do a small update on it.
We are at our second revision on the anchors, they are now based on an STM32F072 CPU which has the advantage to have an USB bootloader which will useful to update them on the field. We are trying to think about either or not we should implement more communication like Ethernet to the anchor. Our main use-case is to get the localisation in the Crazyflie but we are aware of use-case where the localisation is required on the ground instead. If you have any input on the design of Ultra-Wide-Band anchors please let us know.
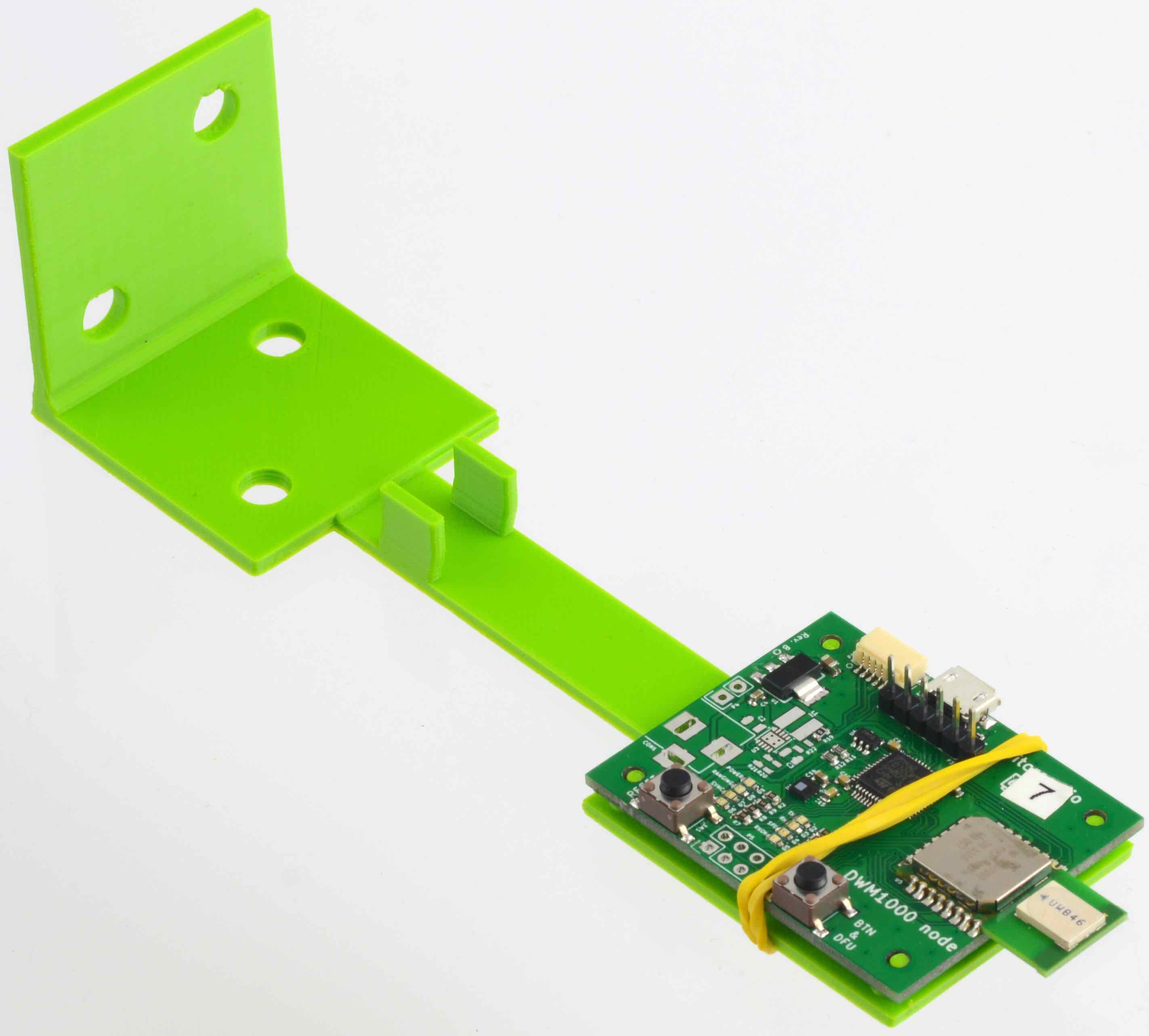
We have also made a 3D printed support for attaching the anchors to the ceiling or ground:
As for the localisation, we are able to range from the copter to the anchors and we are logging the range using the Crazyflie 2.0 log subsystem. We have tested logging data in a csv file and running a Particle filter to find the copter position, more about the filter in a future post. So far it looks good but we need a nicer way to visualize the data. The way we are taking is to learn and use ROS.
ROS is a system used by researcher in robotics and it implements a lot of things like visualization and state of the art algorithm. Wolfgang from USC has written a ROS driver for Crazyflie and it is about time we are getting into ROS. It is a learning process for us but the plan is to implement and test the UWB local positioning system on top of ROS, which will allow us to use its components and reduce development time.