Controlling the Crazyflie from the PC client through the Crazyradio gives you a lot of flexibility and power when it comes to coding and scripting. The drawback is that you need a computer and Crazyradio which is fine in the office, but not as convenient when flying on the go. As a part of our Friday-Fun hacks we have been working on a standalone controller with everything included to solve that problem.
I finished the first working basic prototype a few weeks ago and have done some test flying during my vacation. I (and the son of a friend) am very happy with the performance end ease of use, so I think it is time to move on and create a usable product.
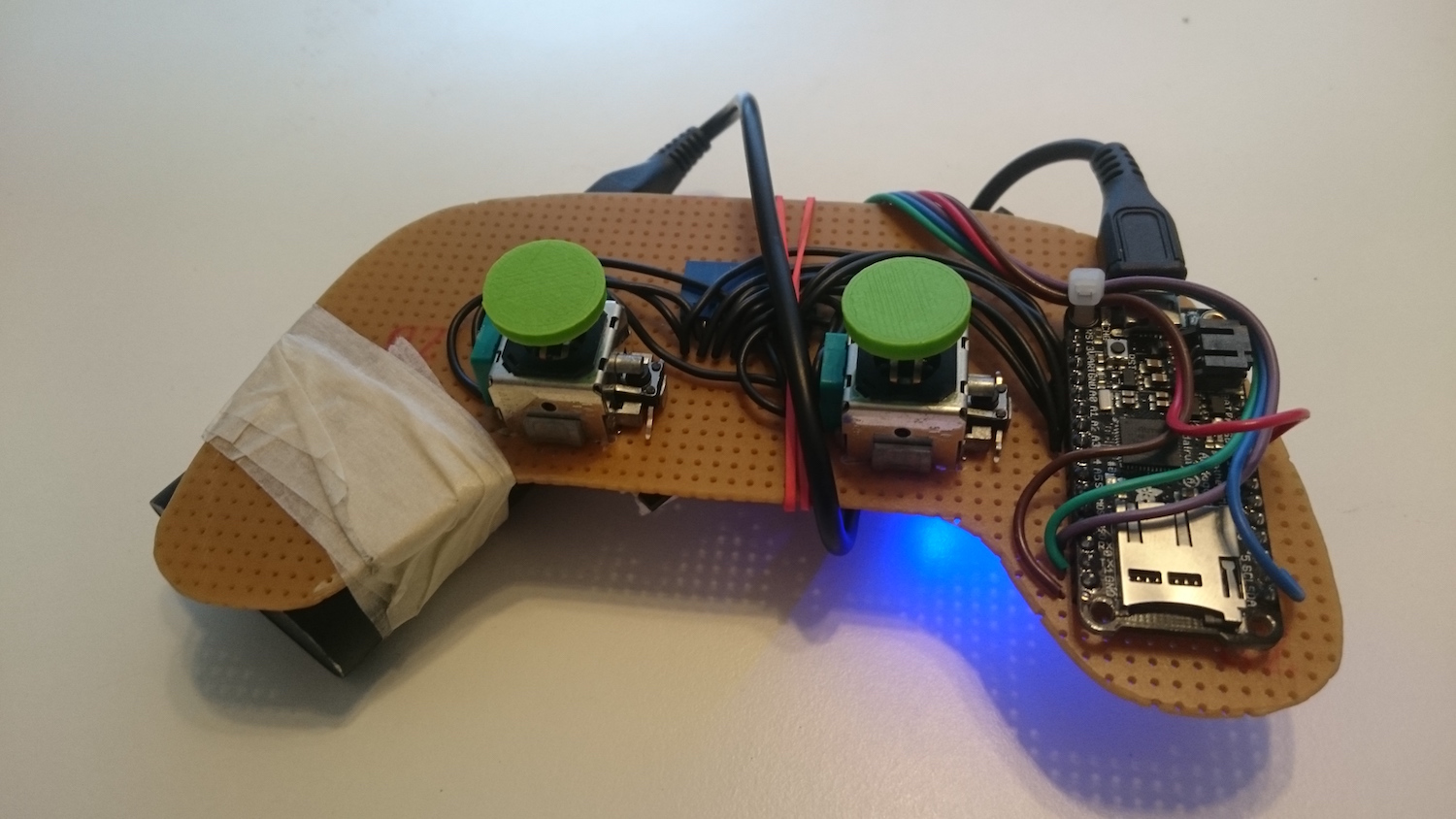
So far the controller is very basic, it is only two joysticks, an Arduino and a radio. All it does is to scan the joysticks and send controller packets on a fixed radio channel. Even though it is super simple I like that it is possible to just turn it on and fly, no other actions are required!
The product will have (many) more features, the question is what to add? This is your chance to be a product designer, if you have any input or wishes let us know!
Some ideas that we have so far:
- Support other protocols to control other copters or robots
- Arduino compatibility to make it simple to alter the functionality and behaviour
- Expansion ports, maybe compatible with Crazyflie decks
- USB and bluetooth low energy to use it as a generic game controller
- A mode to use it as a Crazyradio connected to a computer over USB
We also need to come up with a name, please share your ideas!
Hi nice DIY,
What about on the other side, adapting the CrazRadio PA dongle to an existent TX?
The Crazyradio PA has support in the HW (PPM input) for this, but as far as I know no one has done it yet. There is supposedly also some traces in the software from early trials but nothing is finished. If you feel you are up to it, let us know and we will give you all the support you need :-)
USB port to allow plugging in a CR PA, and some form of power. Possibly header ports to plug the cf2 into for mounting ;). Would be great to have a inductive charger on the bottom that could charge both the remote and CF2.
My idea is that the controller it self could act as Crazyradio and be connected to a computer via USB. That would enable the user to not only fly a CF using the controller, but also use the python client or other software to control it. The USB port on the controller for this scenario would be the device side and not the host side as you suggest though.
The possibility of charging your CF from the controller is interesting. I will add that to my wish list. Thanks!