I am back from parental leave and during this time I tried not to think too much about Crazyflie-related things to get a little break. However, over time, while geeking around, I eventually ended-up back to Crazyflie and Crazyradio designing a new channel-hopping communication protocol. This will likely be the subject of a future blog post but for the time being I thought I could write a bit about how the current Crazyflie radio communication is working.
Protocol layers
Like Many protocols, the Crazyflie communication protocol is layered. This allows to plug different elements at each level. When it comes to a Crazyflie client talking to a Crazyflie over the radio, the layering looks as follow:
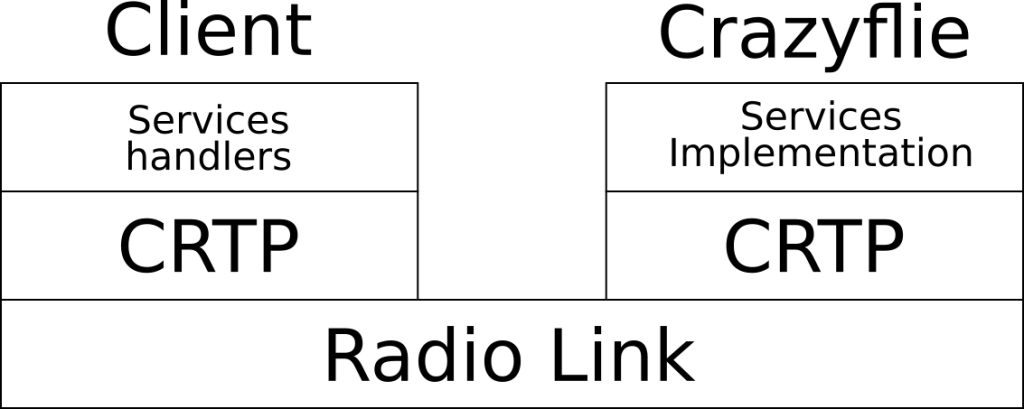
Services are high-level functionalities like log that allows to get values of Crazyflie variables at regular interval. At this level there is essencially an API with commands like addLogBlock.
CRTP is a protocol that encapsulates the commands for each sevices. It multiplexes packets on the link using port numbers, this is very similar to TCP/UDP port on a network, each service is listening and sending packet on a pre-specified port.
Finally the radio link only deals with raw packets. The role of the radio link is to deliver packets from the PC to the Crazyflie and vice-versa. At this level, we have many link implementations, the most used are the radio and the USB link but there also is a Serial link that uses the Crazyflie serial port.
Radio link
The radio link is currently implemented by the Crazyradio (PA) on the PC side and the Crazyflie on the other side. The Crazyradio uses a nordic semiconductor nRF24LU1 USB/Radio chip and the Crazyflie a nRF51822 MCU/Radio. This is importance since, while the nRF51 has a quite flexible radio, the nRF24 does use a standalone SPI radio that has most of the packet handling hard-coded to a protocol that nordic call Enhanced Shockburst (ESB).
The ESB protocol handles sending packet and receiving acknowledgement automatically. A packet is sent on a radio channel, using a 5 bytes address, and when this packet is received on the other side an acknowledgement is sent back using the same address on the same channel. Both the original packet and the acknowledgement can contain a payload.
To implement a bi-directional radio link, the crazyradio is the one sending packets and the Crazyflies continuously listens and, when receiving a packet, sends back an ack. We do use the payload capabilities of both packet we send and of the ack to implement an uplink (PC->Crazyflie) and downlink (Crazyflie->PC) data link.
Of course, one problem with this setup is that while the PC can decide to send a packet at any moment, the Crazyflie needs to wait for the PC to send a packet to have a chance to send one back in an ACK. To make sure the Crazyflie has enough opportunity to send packets back, we are sending packets regular interval to the Crazyflie even if there is no packet to be sent. This polling allows to implement a continuous downlink.
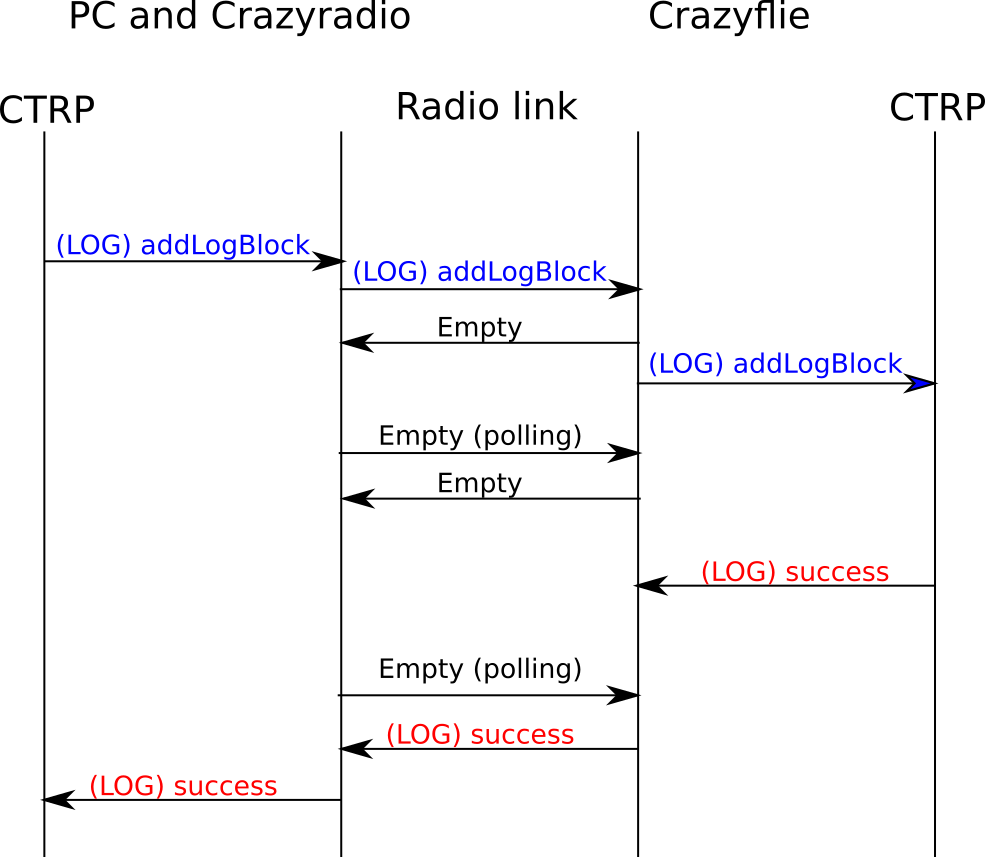
The most important to see here is that the radio link gives to the upper layer, the CRTP layer, the illusion of a full duplex link. On the radio side this is implemented by polling regularly for downlink packets.
Communicating with multiple Crazyflies
In order to communicate with multiple Crazyflie, we just send packet to each Crazyflies one after each-other. This way we give equal chance for each Crazyflie to send back packets and doing so we divide the available bandwidth between them.
The main advantage of the polling protocol versus a more traditional P2P protocol where the Crazyflies would send when they want, is that when using polling the Crazyradio is the master and we can guarantee that we are not introducing any packet collision when we communicate.
Limitation and future
One major limitation of the current protocol is that it communicates on a single channel and requires the user to set manually channel and address for each Crazyflies. This means that the user has to tinker with parameters to find a good channel and has to manually handle all addressing.
Another limitation is that the polling is done over USB by python or, in case of ROS/Crazyswarm, in C++. This adds the USB latency to the equation and complexifies the client implementation.
I have been working on defining a new protocol that would be implemented efficiently in a Crazyradio and that would implement addressing and channel hopping. The idea is to get closer to a connection style more like bluetooth low energy where you do not have to care about channels and setting address, you just connect your device. Unlike BLE though, this protocol will be optimized for low latency. Stay tuned, we will likely talk about that more in future posts :-).