The lithium polymer battery we use, as with basically all rechargeable batteries, suffers from degradation. That means that when using it, and as time goes by, its energy capacity as well as performance will degrade. The performance, which is very related to the batteries internal resistance, will result in that the Crazyflie will not be able to produce the same maximum thrust and it will not be able to carry as much payload. The loss of capacity is due to ageing and charge cycles, results in that the flight time will decrease. A common solution to monitor the degradation is to have a BMS, or Battery Management System, that constantly monitors the battery health. For the small type of battery that is used in the Crazyflie, this is not yet viable, but maybe there is something we can do to test part of the battery health anyway?
Theory
Since the internal resistance will result in a larger voltage drop during load we can exploit this property and measure it. We will however not only measure the batteries internal resistance but the resistance of the complete power path as a result of the components we have at hand on the Crazyflie.
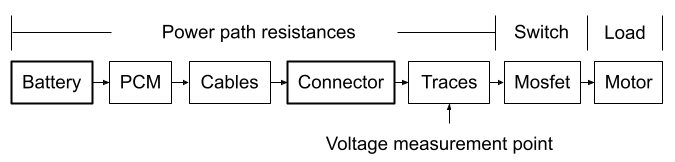
So what we do is to activate the switch (mosfet) so the load (motor) will pull power from the battery. The power drawn will result in a voltage drop compared to a no-load situation, which we can measure and compare to a healthy setup. Since the measurement point is at the PCB traces, any of the components before that point can be causing the voltage drop, however the battery and connector are most likely of doing so as they are most prone to ageing.
Implementation
The load is achieved by, for a very short time, activate the motors at full thrust. We don’t want the Crazyflie to fly away as that would be a bit unhandy. Before activating the motors we measure the idle voltage and during load we measure the minimum voltage so we can calculate the voltage drop. This is pretty easy to do, the problem is to find a good level where we can distinguish a good battery from bad battery. Therefore this feature is pretty experimental. We tested many batteries and good batteries tend to yield a voltage drop between 0.60V – 0.85V while bad batteries go above 1.0V. Therefore the current threshold is set to 0.95V but it would be good to have more data so if you use this feature please give us feedback if the level is wrong. The testing was run on a “stock” setup with the standard battery, propeller and motors, and it is for these the level is set. A different setup will probably not work well and needs a different threshold. Also keep in mind that the connector can also be a “bad” guy as oxide can build up and result in a higher resistance. Often this can be solved with some e.g. WD-40 solvent or un-connecting/connecting the connector several times.
Usage
This is not in the 2021.01 release so one would have to run the latest on the master branch on both the crazyflie-firmware and the Crazyfie-clients-python. The simplest way to test this feature is to launch the cflient, connect to the Crazyflie, open the console tab and press the battery test button.
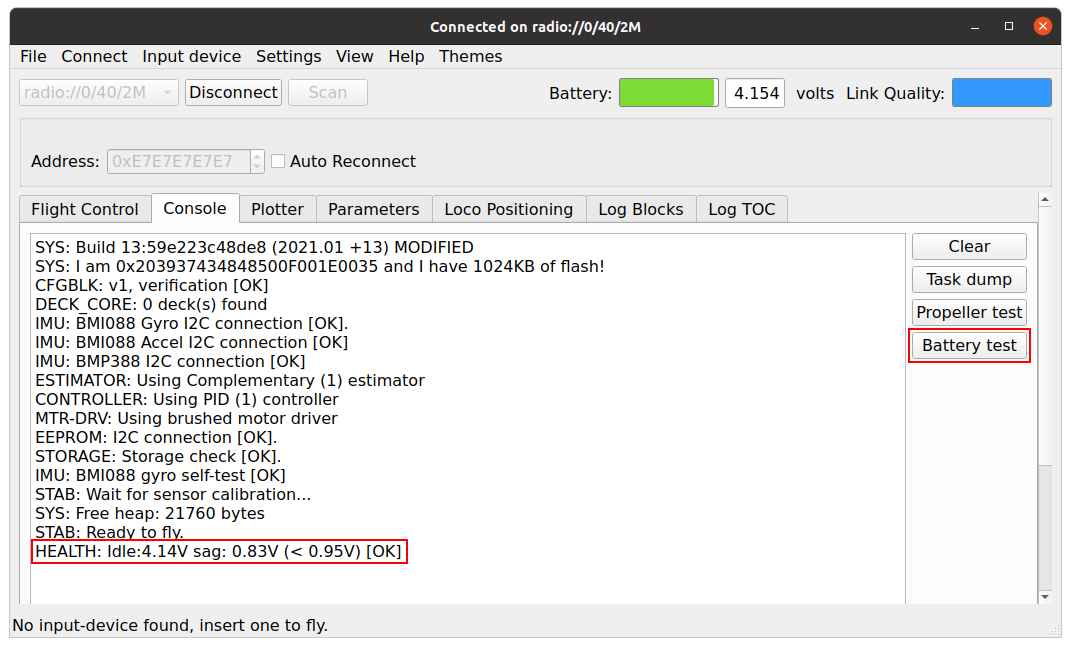
When pressing the button the propellers will shortly spin and there will be an output in the console as highlighted in red. If the sag value is below 0.95V it will yield [OK] and if it is above it will say [FAIL].
A probably more useful use case is to test this automatically before taking of with e.g. a swarm. This can be done by setting the parameter health.startBatTest to 1 and after around 0.5s readout the result in the log variable health.batteryPass to check that it is set to 1. The health.batterySag log variable will contain the latest sag (voltage drop) measurement. Hopefully this experimental feature will be a good way of increasing reliability of flights.
great to share those info, thanks bro