A little while ago we made a blog post talking about the communication reliability, one part of this work did include an alternative CRTP link implementation for the Crazyflie lib. This week we will make one of the native CRTP link implementations, the Crazyflie-link-Cpp, the default link for the Crazyflie python lib.
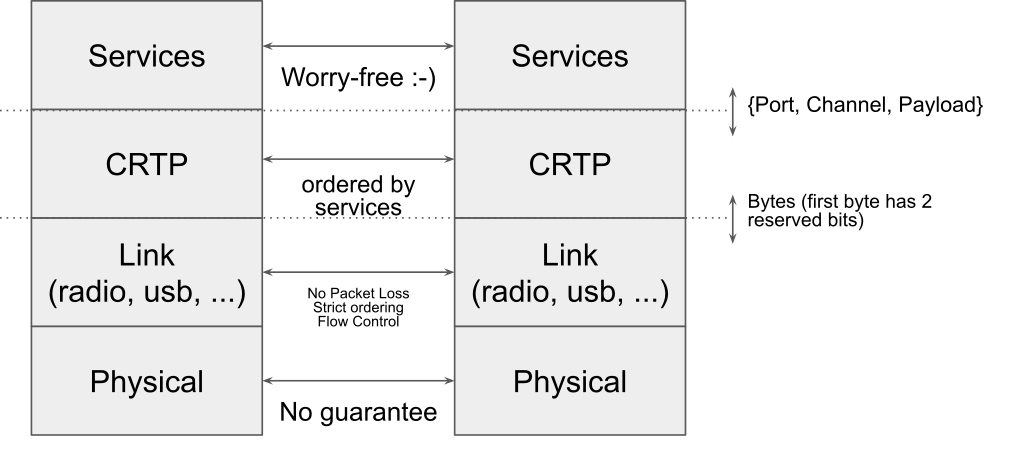
In the Crazyflie communication stack, the CRTP link is the piece of software that handles reliable packet communication between a computer and the Crazyflie. In the Crazyflie it is mainly implemented in the nRF51 radio chip (for the radio link), in the computer it is part of the Crazyflie python lib + Crazyflie client and for Ros and Crazyswarm it is implemented in crazyflie-cpp. Other clients like Lamouchefolle also have re-implemented their own versions of the CRTP link.
The CRTP link is the most critical part in the communication with Crazyflie, if it is not working properly, nothing can work properly, all communication with the Crazyflie passes though the CRTP link. This code duplication in multiple projects means that we have many places for diverging behaviour and creative bugs which makes it hard to develop new clients for the Crazyflie.
One way we are trying to solve this problem is to unify the links: let’s try to use the same link in all the clients. In order to do so we need a link that can act as a minimum common denominator: it needs to work with Python in order to accommodate the Crazyflie Python lib, work with C++ for Crazyswarm and LaMoucheFolle and be high-performance to be able to handle swarms of Crazyflies. The C++ link implementation can full-fill all these requirements using a python binding, and it will give higher performance to the Python lib.
Switching to the native C++ link will give us a lot of benefits:
- It is higher performance, it has about 20% higher packet throughput than the pure python implementation
- It will unify the Python lib and Crazyswarm a bit more. Crazyswarm will be able to use the same link as soon as broadcast packet support is added.
- The Cpp link supports dynamic allocation of radios, no need to choose what radio to use for each connection, the link will distribute connections over all available radios by using a star instead of the radio number (radio://*/80/2M) in the URI.
The biggest drawback so far is that the CPP link needs to be compiled for each platform. We are compiling a python Wheel for it in Github actions for Windows/Mac/Linux on X86_64, any other architecture (including raspberry pi) will use the existing python CRTP link for the time being.
We are in the process of enabling the new link as the default in the lib. There are still some outstanding bugs related to boot loading that needs to be ironed out, but we expect this change to be included in the next release.