My name is Hanna, and I just started as an intern at Bitcraze. However, it is not my first time working with a drone or even the Crazyflie, so I’ll tell you a bit about how I ended up here.
The first time I used a drone, actually even a Crazyflie, was in a semester thesis at ETH Zurich in 2017, where my task was to extend a Crazyflie with a Parallel Ultra Low-Power (PULP) System-on-Chip (SoC) connected to a camera and external memory. This was the first prototype of the AI-deck you can buy here nowadays (as used here) :)
My next drone adventure was an internship at a company building tethered drones for firefighters – a much bigger system than the Crazyflie. I was in charge of the update system, so more on the firmware side this time. It was a very interesting experience, but I swore never to build a system with more than three microcontrollers in it again.
This and a liking for tiny and restricted embedded systems brought me back to the smaller drones again. I did my master thesis back at ETH about developing a PULP-based nano-drone (nano-drones are just tiny drones that fit approximately in the palm of your hand and use only around 10Watts of power, the category Crazyflies fit in) and some onboard intelligence for it. As a starting point, we used the Crazyflie, both for the hardware and the software. It turned out to be a very hard task to port the firmware to a processor with only a very basic operating system at that time. Still, eventually I knew almost every last detail of the Crazyflie firmware, and it actually flew.
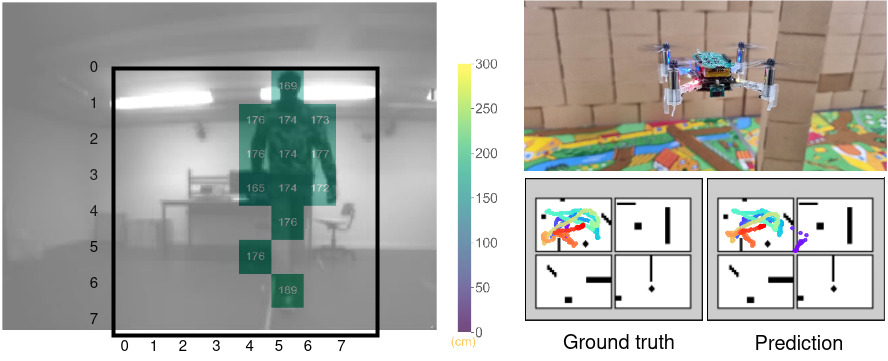
However, for this to happen, I needed some more time than the master thesis – in the meantime, I started to pursue a PhD at ETH Zurich. I am working towards autonomous miniaturized drones – so besides the part with the tiny PULP-based drone I already told you about, I also work on the “autonomous” part. Contrary to many other labs our focus is not only on novel algorithms though, we also work with novel sensors and processors. Two very interesting recent developments for us are a multi-zone Time-of-Flight sensor and the novel gap9 processor, which both fit on a Crazyflie in terms of power, size and weight. This enables new possibilities in obstacle avoidance, localization, mapping and many more. Last year my colleagues and I already posted a blog post about our newest advances in obstacle avoidance (here, with Videos!). More recently, we worked on onboard localization, using novel multi-zone Time-of-Flight sensors and the very new GAP9 processor to execute Monte Carlo localization onboard a Crazyflie (arxiv).
For me, localizing with a given map is a fascinating topic and one of the reasons I ended up in Sweden. It is one of the most basic skills of robots or even humans to navigate from A to B as fast as possible, and the basis of my favourite sport. The sport is called “orienteering” and is about running as fast as possible to some checkpoints on a map, usually through a forest. It is a very common sport in Sweden, which is the reason I started learning Swedish some years ago. So when the opportunity to go to Malmö for some months to join Bitcraze presented itself, I was happy to take it – not only because I like the company philosophy, but also because I just like to run around in Swedish forests :)
Now I am looking forward to my time here, I hope to learn lots about drones, firmware, new sensors, production, testing, company organization and to meet a lot of new nice people!

Hanna