The ability to attach expansion decks to the Crazyflie platforms without modifying their electronics allows experimenting with different hardware components. Most existing decks contain different types of sensors that are used for positioning and collecting data. On this Fun Friday project that has been running for the past couple of months, I explored adding mechanical principles to the Crazyflie with the long-term goal to create a working claw to grab and transfer objects.

The claw
The claw mechanism is built on a DC motor. The motor shaft is connected to a worm gear, which drives the claw to open or close depending on the direction of rotation. All the parts are 3D printed and designed from scratch.

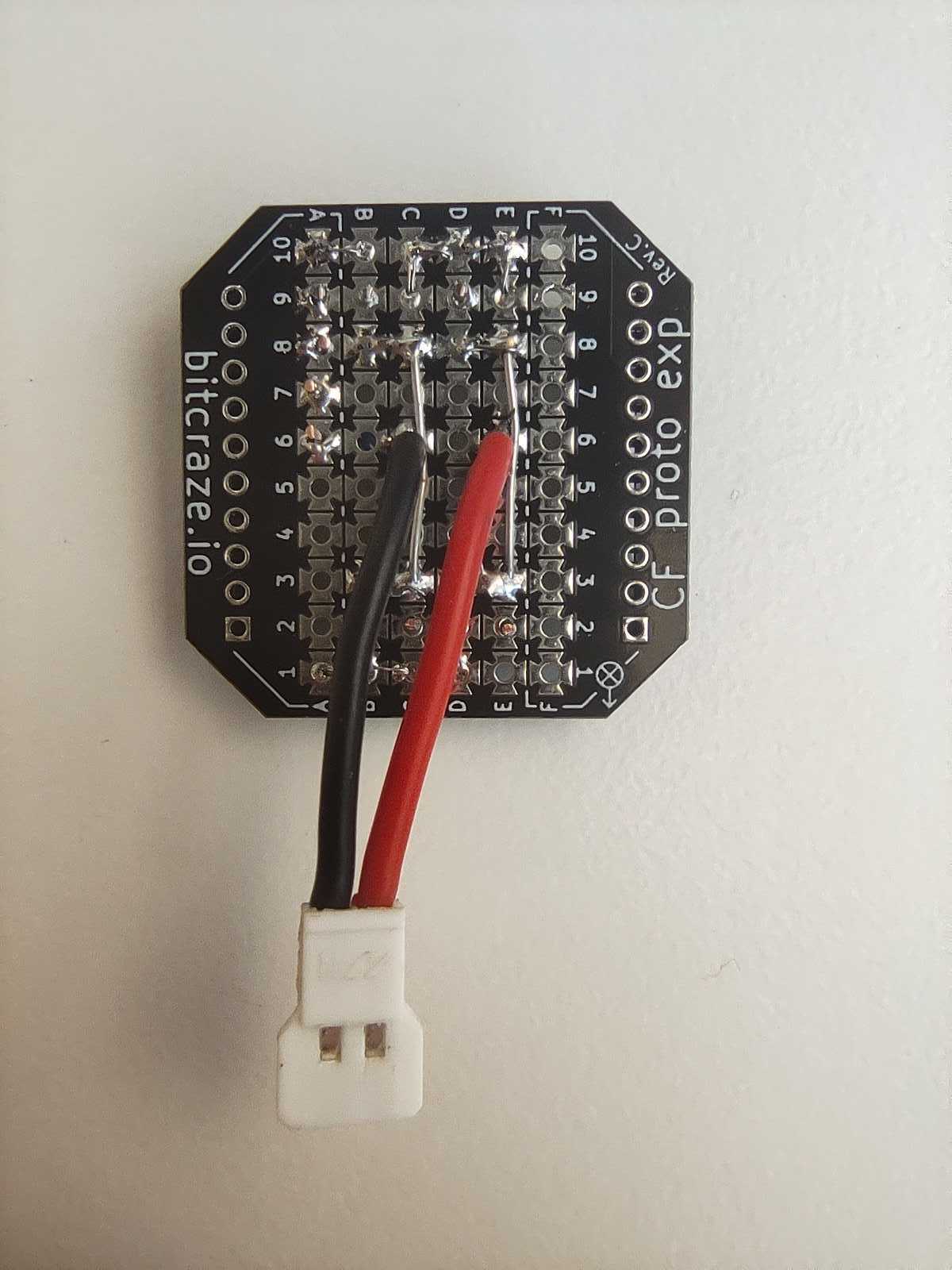
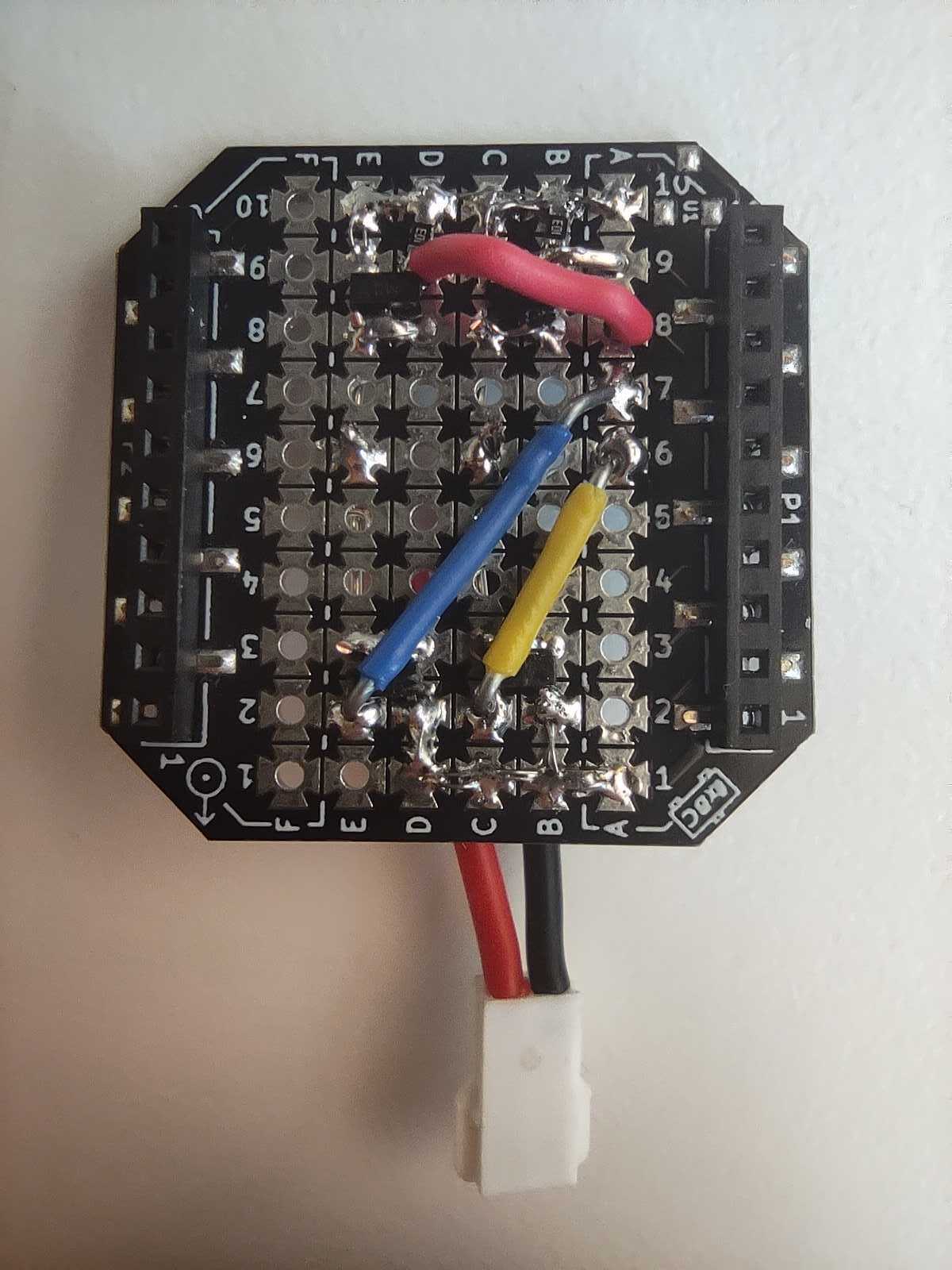
The deck
Making the DC motor rotate in both directions requires reversing its polarity, which can be done using an H-bridge. So, the deck controlling the claw, is essentially an H-bridge that uses VCC 3V, GND and 4 GPIO pins on the Crazyflie. This way it can be compatible with the Lighthouse positioning deck. The circuit consists of 4 Mosfets (2 P-type and 2 N-type) and 2 pull-down resistors.
How it works
When designing a custom deck for the Crazyflie, you need to initialize it with its own drivers. The drivers for the H-bridge deck contain 2 basic functions; the one that opens the claw and the one that closes it. They are triggered using 2 float parameters (clawOpen and clawClose), and remain active for the number of milliseconds specified by the value of each parameter.
Experiments
Since the entire claw setup weighs 29g, I used 2 Crazyflie 2.1 Brushless drones, to equally share the weight, while one of them controls the claw. Together, they can lift up to 74g. A fishing line is attached underneath each drone and the claw can slide along it, keeping it always centered between them. For the load, I used a Crazyflie 2.1+ with a lighthouse deck attached and its motors removed, to reduce its weight. When the script starts, the initial positions are collected and a flight sequence for the swarm is created based on them. Then, the swarm takes off and approaches, grabs, lifts and transfers the load.
Next steps
The initial goal of grasping and transferring objects with a flying claw has been achieved. However, in the future I plan to make the system more robust and easy to use. Some points that I might focus on:
- Making the whole setup lighter – replace the current motor with a lighter one, print with lighter materials.
- Improve the controller tuning to damp the oscillations and make the flight more stable.
- Implement a control system to keep track of the claw’s state – add limit switches.
Hi! This is a super cool project! I was thinking of doing something similar to add functionality to my crazyflie but I am struggling CADing the worm gear with the right ratios to make it functional. Would you mind sharing your design with me? Thank you!
Hello! I’m glad that you liked the project! Integrating a 3-tooth worm gear with the spur gears on the claw fingers is a little bit tricky. I didn’t manage to find a proper formula for that so I had to jump from the part design to the assembly multiple times to make sure they will fit together. The A2plus workbench in FreeCad proved really useful for that task. I can send you the .FCStd files via email.
Hi Aris! I would appreciate that a lot! My CAD skills are definitely rustier than I expected :D
My email address is mkundakc@andrew.cmu.edu
Thanks a lot, looking forward to see how you expand on the project!