It’s time for a new compilation video about how the Crazyflie is used in research ! The last one featured already a lot of awesome work, but a lot happened since then, both in research and at Bitcraze.
As usual, the hardest about making those videos is choosing the works we want to feature – if every cool video of the Crazyflie was in there, it would last for hours! So it’s just a selection of the most videogenic projects we’ve seen. You can find a more extensive list of our products used in research here.
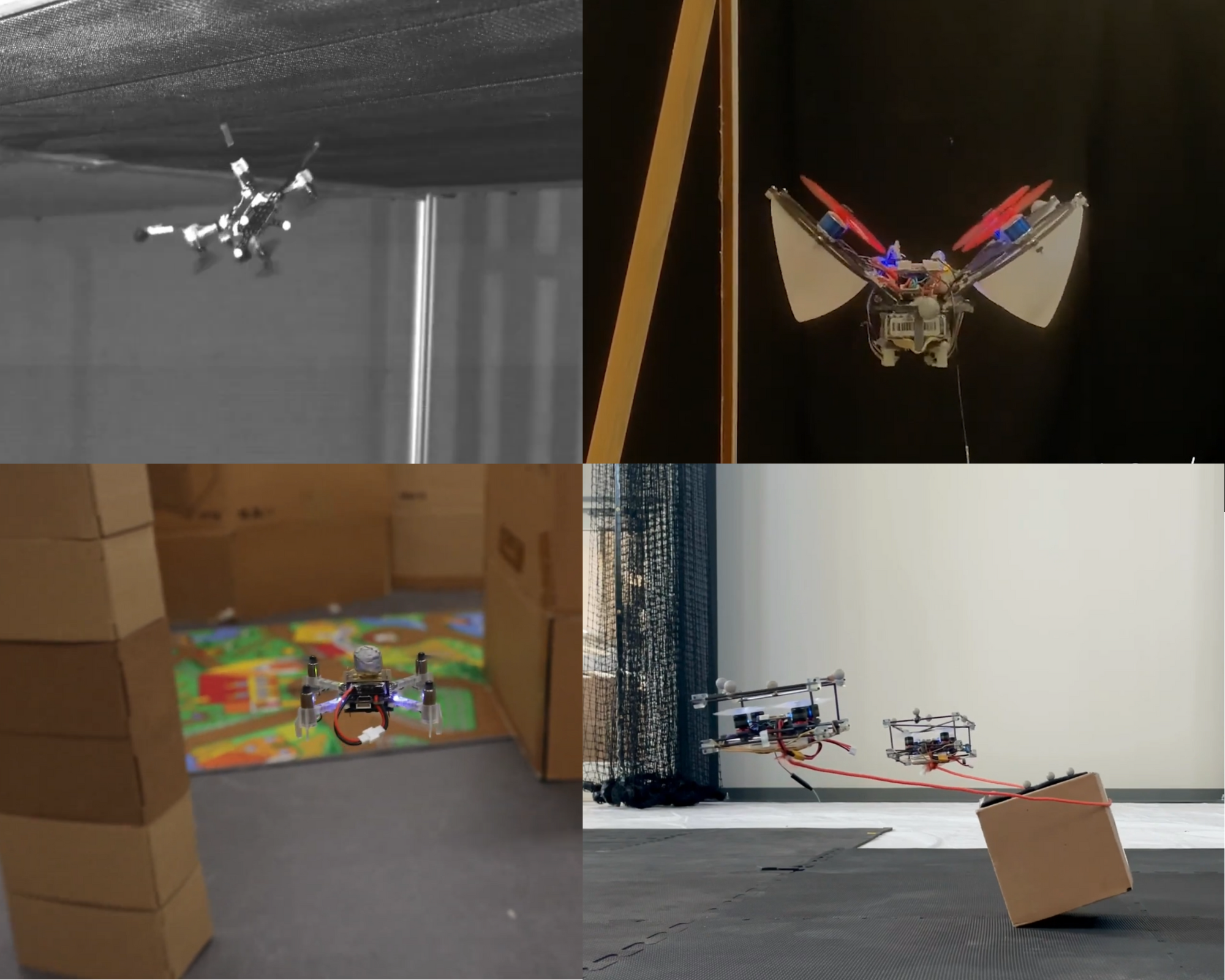
We’ve seen a lot of projects that used the modularity of the Crazyflie to create awesome new features, like a catenary robot, some wall tracking or having it land upside down. The Crazyflie board was even made into a revolving wing drone. New sensors were used, to sniff out gas leaks (the Sniffy bug as seen in this blogpost), or to allow autonomous navigation. Swarms are also a research topic where we see a lot of the Crazyflie, this time for collision avoidance, or path planning. We also see more and more of simulators, which are used for huge swarms or physics tests.
Once again, we were surprised and awed by all the awesome things that the community did with the Crazyflie. Hopefully, this will inspire others to think of new things to do as well. We hope that we can continue with helping you to make your ideas fly, and don’t hesitate to share with us the awesome projects you’re working on!
Here is a list of all the research that has been included in the video:
- A Bioinspired Revolving-Wing Drone with Passive Attitude Stability and Efficient Hovering Flight; Songnan Bai, Qingning He, and Pakpong Chirarattananon; Intelligent Systems Lab, CityU HK (paper)
- A Scalable Distributed Collision Avoidance Scheme for Multi-agent UAV systems; Bjorn Lindqvist, Pantelis Sopasakis and George Nikolakopoulos; University of Luleå (paper)
- Sniffy Bug: A Fully Autonomous Swarm of Gas-Seeking Nano Quadcopters in Cluttered Environments; Bardienus P. Duisterhof, Shushuai Li, Javier Burgués, Vijay Janapa Reddi, Guido C.H.E. de Croon ; TU Delft, Universitat de Barcelona, Harvard University (paper)
- Modular Multi Robots: From Quadrotors to fully actuated aerial vehicles; Jiawei Xu, David Saldaña; Lehigh University (paper)
- Passive Wall Tracking for a Rotorcraft with Tilted and Ducted Propellers using Proximity Effects; Runze Ding, Huaiyuan Jia, Songnan Bai, and Pakpong Chirarattananon; Robotics and Intelligent Systems Lab, CityU HK (paper)
- Optimal Inverted Landing in a Small Aerial Robot; Bryan Habas. Bader AlAttar, Brian Davis, Jack W. Langelaan, Bo Cheng; Penn State University (paper)
- Learning-based Bias Correction for TDOA UWB Localization of Resource-constrained Mobile Robots; Wenda Zhao, Jacopo Panerati, and Angela P. Schoellig; University of Toronto (paper)
- Passive Perching for Flying Robots with Bistable Grippers; Haijie Zhang, Elisha Lerner, Bo Cheng, Jianguo Zhao; Adaptive Robotics Lab, Colorado State University, Penn State University (paper)
- Polynomial Time Near-Time-Optimal Multi-Robot Path Planning in Three Dimensions; Teng Guo, Siwei Feng, Jingjin Yu; Algorithmic Robotics and Control Lab at Rutgers (paper)
- Non-Prehensile Manipulation of Cuboid Objects Using a Catenary Robot; Gustavo A. Cardona , Diego S. D’Antonio , Cristian-Ioan Vasile and David Saldana; Lehig University (paper)
- Towards Reliable Obstacle Avoidance for Nano-UAVs; Iman Ostovar, Vlad Niculescu, Hanna Müller, Tommaso Polonelli, Michele Magno, Luca Benini; ETH Zurich (paper)
- Error-State Unscented Kalman-Filter for UAV Indoor Navigation; Klaus Kefferputz and Kimberly McGuire; HS Augsburg (paper)
And, without further ado, here it is: