Over the years, the Crazyflie® ecosystem has grown far beyond a single nano drone. It now also includes positioning systems, expansion decks, software libraries, simulation tools, research examples, educational resources, and a global community of researchers, educators, innovators, and developers.
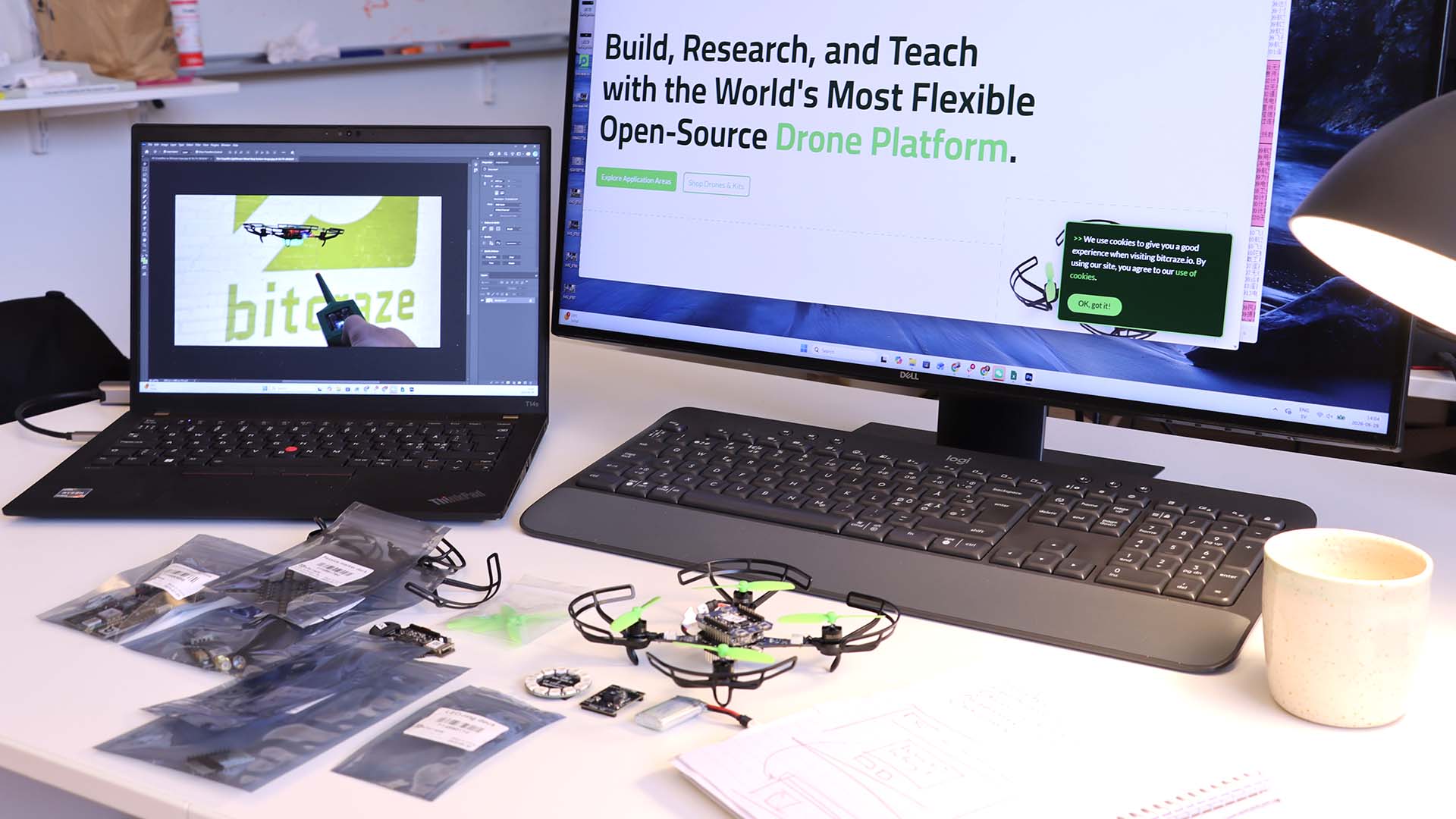
The growth has been exciting, but it has also introduced a challenge. If you were new to Bitcraze, it was not always obvious where to start, what was possible with the platform, or how the different pieces fit together. To address that, we have made updates to bitcraze.io in an effort to make the ecosystem easier to understand, navigate, and engage with.
Starting from the questions people actually ask
When talking to the community, the same questions tend to come up:
What can I do with the Crazyflie?
Which hardware do I need?
Where do I find documentation?
How do I get started?
What are other people doing with the platform?
How can I contribute?
The updated website is an attempt at answering those questions more directly.
The front page has been simplified, navigation has been streamlined, and page layouts have been updated to improve readability across the site.
Lowering the barrier to getting started
Another goal has been to reduce friction for new users. The Crazyflie platform serves a broad audience, from first-time students to experienced robotics researchers. We want newcomers to understand where to begin without having to learn the entire ecosystem first.
At the same time, we want experienced users to more quickly find advanced resources, technical documentation, and examples relevant to their work.
This is the first step
This is the first step in an ongoing effort to improve how information is presented and discovered across the Bitcraze ecosystem. We expect to continue refining content, adding resources, improving navigation, and learning from how the community uses the site.
If you explore the new site and find something confusing, missing, or particularly useful, we would love to hear from you. After all, the platform has always evolved together with its community. Take a look around and let us know what you think.
Whether You Realize It or Not, You’re Part of the Crazyflie Community
Most people probably don’t think of themselves as members of the Crazyflie community. They’re busy finishing experiments, writing papers, debugging flight controllers, supervising students, preparing grant applications, or trying to make a deadline. And yet, whether you think about it or not, you’re part of it.
Every time a paper is published, a GitHub issue is filed, a forum question is answered, or a new experiment is shared, the platform changes a little. Other researchers discover new approaches. Students inherit new examples. Future users benefit from lessons that someone else learned the hard way.
The Crazyflie ecosystem is not defined by Bitcraze. It is defined by thousands of individual decisions made across universities, research institutes, classrooms, and laboratories around the world, which makes us curious:
What are you working on?
What tools do you rely on?
What parts of the ecosystem help you move faster, and which parts slow you down?
What should we spend more time improving?
To help answer those questions, we’re running a community survey. Not because we need validation for decisions we’ve already made, but because many of the decisions we will make next should be informed by the people who use the platform every day.
If you use the Crazyflie, your experience matters. Make your voice heard!
We are at ICRA 2026 in booth 91, and we are looking forward to a few days in Vienna for research discussions, technical conversations, and reconnecting with the community.
ICRA has always been a favorite of ours. It brings together researchers from very different domains, but despite different research goals, many face similar questions around how to build reliable experiments, iterate quickly, and evaluate results in a repeatable way.
Many of the improvements in the Crazyflie ecosystem over the years have started exactly there. Someone stops by the booth, describes a challenge in their lab, and shortly thereafter a feature, library, or hardware addition begins to take shape.
This year we are bringing a few things we are excited to discuss.
Towards larger and easier-to-manage swarms
Over the last months we have spent time improving how larger groups of Crazyflies behave and scale in practice.
Swarm experiments sometimes start small. Then a few drones become ten, ten become fifty, and suddenly radio communication and system overhead become part of the research problem itself.
Recent work around overall system performance has significantly improved how many Crazyflies can be handled from a single radio, reducing communication bottlenecks and making larger coordinated experiments easier to run. We are also working toward improved tooling and workflows for managing swarms, with the goal of reducing setup complexity and making experiments easier to reproduce. A transition to Rust has helped reduce connection overhead and improve responsiveness in larger systems.
We are looking forward to discussing where this work is heading and hearing what challenges researchers encounter in their own systems.
Tech talk: “A Swarm Welcome to New Aerial Robotics Functionality”
Wednesday, June 3rd, 12:45 CEST, at the Tech Talk Stage in Hall C7
We will give a tech talk focused on recent work around swarm functionality and capabilities.
The session will cover improvements that significantly expand what can be done with larger Crazyflie groups and how recent developments are reducing practical limitations in swarm experimentation.
If your work involves multi-agent systems, collective behaviors, or coordinated aerial robotics, stop by and continue the discussion afterward.
Demonstration: SwarmGPT and human interaction with robot swarms
Some of you may remember the end-of-year collaboration a few months ago. This time we are bringing a more interactive version of the concept. SwarmGPT explores how natural-language intent can be translated into coordinated swarm behaviors. Rather than manually programming trajectories, users can pick a piece of music and prompt desired expression, and leave planning and safety mechanisms to the system to execute on.
Come by our booth and try it for yourselves.
Color, Rust, camera deck, and more
We will also bring several smaller developments and ongoing efforts that we have discussed on the blog over recent months.
Discussions around improved swarm workflows and management support
The Color LED deck has turned out to be useful far beyond aesthetics. In swarm experiments, visible state information can help indicate timing, grouping, synchronization, and system behavior across multiple agents.
User survey
We will be running a community survey during ICRA. One of the strengths of the Crazyflie ecosystem is the breadth of research and experimentation happening around it. People use the platform in ways we never originally anticipated, often combining different hardware, software, and workflows depending on the research problem they are trying to solve.
The survey is an opportunity for us to better understand how the platform is being used today, and the feedback helps us make better decisions around priorities, tooling, documentation, hardware, and long-term roadmap direction.
This has become a tradition. If you are presenting research involving Crazyflie and do not need your poster after your session, bring it by the booth.
We love collecting them and filling our office walls with the incredible range of work built on the platform. It is also one of our favorite ways of seeing where the community takes the Crazyflie next.
Bring your poster, and we will make sure you leave with a little Bitcraze treat in return.
Find us in booth 91
If you are working with Crazyflie already, considering it for your research, or simply want to discuss ideas around swarm robotics, autonomous flight, perception, AI, or experimental workflows, stop by booth 91.
We built a small drone for people who want to understand how things fly. The community took it considerably further than that. The citations keep arriving from directions we didn’t anticipate. Spacecraft dynamics. Tactile human-swarm interaction. Onboard deep learning. Mapping algorithms that fit inside a nano-drone’s compute budget. The platform’s combination of openness, known dynamics, repeatable behavior, and low replacement cost turns out to be useful for a wider set of problems than any single team could have imagined building for.
What follows is by no means a comprehensive survey, but rather a selection of research areas where the Crazyflie has found a home, each illustrated with recent work. We find it genuinely interesting that the same hardware can be useful across this range, and we hope it gives other researchers a sense of what is possible.
1. Decentralized Multi-Agent Coordination and Swarm Control
Multi-agent coordination is probably the research area most closely associated with the Crazyflie, and for good reason. The platform’s light weight, predictable dynamics, and relatively low cost per unit make it practical to run experiments with enough agents to observe emergent swarm behavior, rather than just simulating it. A lab can field a meaningful swarm without the capital outlay that larger platforms would require.
Recent work has pushed this in some interesting directions. Decentralized approaches, where each agent makes decisions based on local information rather than a central planner, are particularly well-served by a platform where individual failures don’t cascade into catastrophic system loss. Research on collision avoidance, formation control, and consensus algorithms benefits from hardware that can absorb the crashes that inevitably happen when you are testing novel coordination strategies.
The ROS 2 ecosystem around the Crazyflie has matured considerably, with frameworks like Crazyswarm2 enabling standardized multi-drone experiments that other labs can replicate. The reproducibility this enables is meaningful: a coordination result demonstrated on Crazyflies in one lab is demonstrable in another (see “CrazyChoir: Flying Swarms of Crazyflie Quadrotors in ROS 2” (arXiv)).
2. Onboard AI and Edge Inference at Nano Scale
What can you fit inside a couple of dozen grams grams and still have compute left over for intelligence? Quite a lot, it turns out, especially when researchers are motivated to find out. The AI Deck, which adds a GAP8 system-on-chip with a camera and Wi-Fi, opened a wave of work on fully onboard perception and inference pipelines on nano-UAVs.
More recently, work using custom expansion decks with the GAP9 processor has enabled onboard SLAM and scan-matching at take-off weights around 46 grams, showing that the platform’s expansion architecture makes it a meaningful target even as compute capabilities grow. See “Ultra-Lightweight Collaborative Mapping for Robot Swarms” (arXiv).
The Crazyflie’s transparent hardware design is important here: researchers can build custom decks, verify the power budget, and integrate new silicon without waiting for a vendor to offer an approved configuration.
3. Spacecraft and Orbital Dynamics Simulation
Researchers at the University of Houston, in collaboration with the US Air Force Research Laboratory, used Crazyflie drones to simulate the relative motion dynamics of spacecraft in formation, specifically the Clohessy-Wiltshire equations that describe how objects move relative to each other in near-circular orbit.
The reasoning is practical: testing spacecraft autonomy on-orbit is expensive and high-risk. Ground-based testbeds using air bearings exist, but are complex and space-intensive. A small fleet of Crazyflies, running scaled versions of orbital trajectories in an indoor lab, offers a much cheaper and more accessible way to validate formation-flying control laws and neural network guidance systems before committing to hardware that will be launched into space.
4. Reinforcement Learning: From Simulation to Real Hardware
Reinforcement learning (RL) for drone control has been a thriving research area for years, but the gap between simulation and physical hardware remains a hard problem to close. The Crazyflie’s well-documented dynamics, consistent manufacturing, and open firmware have made it a preferred target for sim-to-real transfer research, because the sim and the real thing can be brought into close agreement.
Work in this space spans a wide range of problem settings. Multi-agent RL for collision-free navigation, safe RL with control barrier functions, landing on moving targets, and agile trajectory following in cluttered environments have all been demonstrated on Crazyflie hardware. A common thread is that the platform’s low inertia and predictable response make it a fair test: there is nowhere to hide on a platform this light and responsive, and if the policy is sloppy, it falls (see “AttentionSwarm: Reinforcement Learning with Attention Control Barier Function for Crazyflie Drones in Dynamic Environments” (arXiv).
The “LEARN framework”, which claims to run a compact attention-based RL policy on six Crazyflies for multi-robot navigation through 0.2-meter gaps at 2 m/s, is a recent example of how far this line of work has come. The system runs fully onboard, using only time-of-flight sensors, and transfers directly from simulation to real hardware without fine-tuning. See “LEARN: Learning End-to-End Aerial Resource-Constrained Multi-Robot Navigation” (arXiv).
5. Human-Swarm Interaction and Expressive Robotics
An unexpected corner of the research community is the one that adopted the Crazyflie to the human-robot interaction field. It turns out that a swarm of small, quiet, slow-moving drones is a better vehicle for studying how humans interpret and respond to group robot behavior than many ground robot alternatives.
Work in this space ranges from the technical to the almost philosophical. Researchers have studied whether humans perceive swarm motion as intentional and communicative; whether vibrotactile feedback can give operators an intuitive sense of swarm state during physical interaction; how flight formation shapes emotional perception; and how to design impedance-controlled swarms that respond naturally to human touch (see “SwarmTouch: Tactile Interaction of Human with Impedance Controlled Swarm of Nano-Quadrotors” (arXiv).
The Crazyflie’s low injury risk in the event of a collision, its predictable behavior, and its ability to carry sensing and communication payloads make it well-suited to user studies where physical proximity and spontaneous human response are important variables. The fact that the platform is widely available also matters: HRI research benefits from results that can be reproduced in different lab environments with different participant populations.
Looking across these five areas, a pattern emerges. In each case, the research is not about the Crazyflie itself. The platform is a means, not an end.
What the Crazyflie provides is a credible physical substrate that researchers can trust to behave consistently, modify freely, and replace cheaply when something goes wrong. The open source firmware means the dynamics are fully inspectable. The transparent hardware means the platform can be extended with custom decks. The stable software ecosystem means results from one year’s experiments can be compared against another year’s, and against results from other labs using the same platform.
If your research uses the Crazyflie in a direction not represented here, we’d like to hear about it. The research portal at bitcraze.io/portals/research lists some of what we know about, but the community is larger and more inventive than any curated list can capture.
Bitcraze will exhibit at the European Robotics Forum 2026 March 23-27 in booth #90, where we will demonstrate a live, autonomous indoor flight setup based on the CrazyflieTM platform. The demonstration features multiple nano-drones flying autonomously in a controlled environment and reflects how the platform is used in research and applied robotics development.
Why Indoor Aaerial Testbeds Matter
The purpose of the demonstration is not the flight itself, but the role such setups play in validating aerial robotics concepts. Indoor, small-scale aerial systems allow researchers and R&D teams to study autonomy, perception, control, and multi-robot coordination under safe and repeatable conditions. This makes it possible to explore system behavior, test assumptions, and iterate rapidly before moving to larger platforms or less controlled environments.
Applicable in Both Academia and Industrial R&D
Bitcraze is used both in academic research and in industrial R&D contexts. In academia, the platform supports experimental work in areas such as swarm robotics, learning-based control, and human–robot interaction, and has been referenced in hundreds of peer-reviewed research papers worldwide. In industry, similar setups are increasingly used as testbeds to de-risk development by validating ideas indoors before scaling to outdoor testing, larger drones, or other robotic systems that require higher investment and operational complexity.
Hands-on Discussions at the Booth
At the booth, the live flight cage will be complemented by hands-on access to additional drones, expansion decks, and software tools. This allows for technical discussions around hardware architecture, sensing and positioning options, software stacks, and how different configurations support different research or development goals.
The Conversations We Are at ERF to Have
At ERF, Bitcraze is there to engage in conversations about platforms, testbeds, and how ambitious aerial robotics ideas can be validated in a financially responsible, safe, and controlled manner. This includes discussions with academic groups, industrial R&D teams, and project partners working across the research-to-application spectrum.
Looking forward to the discussions in Stavanger in booth #90!
Last week, Bitcraze attended the BETT Show in London to get a better sense of how the education landscape is evolving.
BETT (British Educational Technology Show) brings together educators, edtech companies, curriculum developers, policymakers, and technology providers across the full spectrum of learning: from primary school to higher education and professional training.
For us, it was a valuable opportunity to listen and get an understanding of where the general EDU landscape is and where it is heading.
Meeting Familiar Faces, and New Ones
One of the most rewarding parts of the visit was reconnecting with existing partners already using the CrazyflieTM in educational settings, and meeting new potential collaborators: teachers building robotics programs, universities modernising their lab infrastructure, and organisations developing national STEM (Science, Technology, Engineering, and Mathematics) and STEAM (Science, Technology, Engineering, Art, and Mathematics) initiatives.
A recurring theme in many conversations was the need for platforms that are robust and safe to use in classrooms, scale from simple programming exercises to advanced autonomy and AI, support both structured teaching and open-ended experimentation, and are well documented (both for the teacher and for the student).
These are exactly the problems we have spent more than a decade working on.
What the Education Robotics Market Looks Like Today
Speaking with a wide range of robotics vendors, software providers, and solution integrators gave us a clearer picture of the realities of the K-12 and STEM market:
Procurement is often tender-based and highly structured
Budgets are tight and price sensitivity is real
There are many vendors offering similar-looking robotics kits
Hardware is physically robust and classroom-proof and safety is critical
Programming is dominated by Python, Scratch, Blockly, or proprietary visual tools
“AI-enabled” frequently means GPT-style programming blocks layered on top
LEGO compatibility is everywhere
micro:bit has effectively become a compelling entry-level control board
Buyers apply hard scrutiny to educational value and learning outcomes
Real adoption requires curricula, lesson plans, and teacher training programs
And in practice, U.S.-developed curricula often transfer reasonably well globally
Why the Crazyflie is a Great Fit for Education
Although the Crazyflie originated as a research platform, its characteristics map naturally to education:
STEM / STEAM (Upper Secondary & High School)
Students can work hands-on with control systems, sensors, wireless communication, programming, and basic AI in a physical system they can see, debug, and iterate on. It makes abstract concepts tangible.
Undergraduate Education
Crazyflie is increasingly used in robotics, embedded systems, and mechatronics courses to teach estimation, control, perception, and multi-agent systems without the overhead of large and expensive hardware.
Post-graduate Research
This remains our strongest domain: swarm robotics, learning-based control, human–robot interaction, indoor navigation, and distributed systems.
The continuity matters. Students don’t outgrow the platform. They grow with it. And, more importantly, the same openness that researchers value is increasingly relevant in education as well (particularly relevant in the light of recent geopolitical movements). Institutions want transparency, long-term maintainability, and the freedom to adapt tools to their pedagogy and not just consume closed kits.
Education is a Strategic Part of the Robotics Ecosystem
BETT confirmed that education is a strategic and structured part of the robotics ecosystem. Not just as “learning about robots”, but as a way to train future engineers, researchers, and system designers using realistic platforms from an early age.
Succeeding in this segment requires more than good hardware. It requires thoughtful packaging, clear educational positioning, proper teaching material, partner ecosystems, and long-term commitment.
To those we met at BETT, thank you for the conversations. And if you are working with STEM, STEAM, or robotics education and are curious about the Crazyflie, we are always happy to talk.
Recent work from the Learning Systems and Robotics Lab explores a question many of us have implicitly wrestled with:
How do we design expressive, coordinated swarm behavior without hand-crafting every trajectory?
Their answer, presented in the paper “SwarmGPT”, is to use large language models not as low-level controllers, but as a high-level interface for swarm intent, and then rely on classical robotics methods to make that intent executable and safe.
So what is SwarmGPT?
SwarmGPT is not about letting an LLM “fly drones”. Instead, it introduces a clear separation of responsibilities:
Language models operate at the level of structure, timing, and choreography
Motion planning and control handle feasibility, collision avoidance, and dynamics
Execution remains deterministic and verifiable
In practice, this means a user can specify swarm behavior using natural language (or music-derived cues), and the system generates structured multi-drone trajectories that are then validated and executed using established robotics pipelines.
This distinction matters. The paper does not replace control theory, but it compresses the path from idea to experiment. For researchers, this has several implications:
Faster iteration on swarm concepts
Lower barrier to expressive multi-agent behavior
A clean interface between creative intent and physical constraints
Making Swarm Structure Visible With the Crazyflie Color LED Deck
The authors used Crazyflie drones as research platform and we sent them a handful of Crazyflie Color LED Decks to experiment with.
The LED deck is not just decorative. It provides, per-agent visual feedback, clear indication of phase, grouping, or timing, and immediate insight into synchronization and coordination.
For research, this supports:
Real-time inspection of swarm state
Easier debugging of generated behavior
More legible demonstrations of complex coordination
For drone show–style applications, it enables:
Tight coupling between motion and light
Expressive patterns where choreography and illumination reinforce each other
Rapid iteration on visual concepts without custom hardware
The same capability serves both domains, which is part of its appeal.
Happy Robotic Holidays!
In our annual holiday video, nine Crazyflies take off from the Bitcraze HQ in Malmö. After briefly hovering to demonstrate the three mounting options of the Color LED Deck, they make their way to the Learning Systems and Robotics Lab in Munich.
There, they perform a SwarmGPT-generated choreography before slowly landing in a sparkling snowflake pattern.
When sandwich-mounted, the top- and bottom-mounted Color LED Decks can display independent colors and light patterns, enabling richer visual expressions and more nuanced feedback.
At Bitcraze, we’ve always believed in giving people the tools to explore the world of robotics, and especially flying robotics. We’re still surprised by just how many directions you’ve taken the Crazyflie platform, and the research and innovation areas seem endless. Swarming, autonomy, edge AI, vision, navigation, mapping, coordination, etc. are all examples of areas you are interested in and what you are using the Crazyflie to unlock.
But what about the more human aspects of robots, and the relationships we build with these machines? What does it feel like to share space with a flying system, and how can we see drones not only as tools, but companions? And how can we help push social robots from academic theory into everyday life?
These are the kinds of questions we’ve been exploring at Bitcraze and with the Drone Gymnasium, we finally have a space designed to push those ideas further.
It’s a living lab, where the boundaries between code, design, behavior, and imagination are blurred. A temporary, yet functional, “future lab” where people experiment with how flying robots might one day fit seamlessly into real-world environments. How they could share space with people, not just in theory, but in practice.
Students from the Physical Interaction Design course, together with our own drone experts, prototyped new robotic experiences using the Crazyflie platform, not just as flying hardware, but as social agents in motion.
From Lab to Real Life
One of the great unsolved challenges of social robotics is translation, moving from controlled lab setups into the beautiful, messy, complexity of the real world.
That’s where many good ideas stumble. That’s also where the Crazyflie shines.
Open, modular, and programmable down to the bone, the Crazyflie gives researchers and innovators permission to try things. To test, break, rebuild, and then observe how it feels to share a room with a machine that moves and reacts in the same space as you.
The Drone Gymnasium is one of many ways we’re trying to support academia, not just in supplying hardware, but in co-creating learning environments where ideas around autonomy, behavior, and social interaction can be explored hands-on, in full view of the community.
Asking Better Questions
And the results are exciting. From emergent swarm behaviors to subtle gestures and sound cues, the participants in the Drone Gymnasium weren’t just building tech, they were testing social contracts. What makes a drone feel present instead of intrusive? Helpful instead of unsettling?
That’s not only an academic question. It’s a design question. And a human robotics question.
We believe spaces like this are interesting, not only to prepare the next generation of roboticists, but to ask better questions about what we’re actually building, and for whom.
We are hosting a side event at “The Drop” in our home town of Malmö, Sweden.
The Drop, brought to life by Pale Blue Dot and Domino Studio, is not just another climate tech festival. It’s a dynamic forum for scientists, investors, startups, and innovators who thrive on meaningful dialogue and next-generation problem solving.
Set inside a century-old, repurposed train workshop, The Drop combines historic ambiance with forward-looking discussions. Attendees often highlight how the event sparks collaborations, unlocks new funding opportunities, and reignites optimism for the future of climate innovation.
Side events at The Drop shift the focus from grand stages to gritty, solution-oriented collaboration. There’s a long list of pop-up gatherings in Malmö’s coffee shops, studios, and parks, where teams form around specific challenges to discuss, prototype, or model new ways of solving traditional problems.
At the side event we invite participants to a discussion about the emerging role of autonomous drones in society, not just as tools, but as extensions of our thinking, imagination, and responsibility. There will be good coffee, delicious croissants from our favourite French breakfast place Dame Ginette, real tech, hands-on experimentation, and an open conversation about how robotics can be both functional and poetic.
Although our attendee capacity has maxed out, you can still sign up and hope to secure a spot. See the side event page for more details and hope to connect with fellow innovators eager to push the boundaries of robotics and climate tech later this week!
We built a strong contender in the world of indoor micro drones, and it’s pushing the boundaries of what’s possible in the lab, lecture hall, and research workshop. We are talking about the Crazyflie 2.1 Brushless and it has proven to be a leap in capability, endurance, and potential, compared to the Crazyflie 2.1+. And, it’s all designed for indoor environments where precision, safety, adaptability, and repeatability matter most.
Engineering Advances that Matter
The Crazyflie 2.1 Brushless expands the indoor experimentation capabilities, letting researchers fly longer, push for more complex missions, and iterate faster.
The most striking evolution is the switch from brushed to brushless motors, which becomes a real enabler for serious indoor flight:
Robust onboard electronics and compatibility with the full Crazyflie 2.X expansion ecosystem (except the LED ring), which means every sensor, radio, and positioning deck you’ve built will just work out of the box.
10-minute flight time on the stock 350mAh battery, compared to the old ~7 minutes of the Crazyflie 2.1+.
Max payload of 40g, more than doubling the prior recommended limit and opening the door to advanced sensors and heavier expansion decks.
Quieter and more reliable flight, thanks to lower RPM propellers optimized for a stealthier, stable operation in confined spaces.
Real Research: Indoor Applications
The Crazyflie platform is already a staple in academic circles, and “The Brushless” amps things even further:
Swarm Robotics Indoors: Multiple universities coordinate Crazyflie swarms inside test arenas, labs, and lecture halls for research into distributed control, real-time collision avoidance, and modular asset tracking.
Precise Indoor Positioning: With decks for Lighthouse or Loco positioning, research groups achieve centimeter-level indoor path planning and formation control. This is vital for AI benchmarking where GPS access isn’t possible.
Autonomous Sensing: The payload bump means researchers could run in-situ experiments with real environmental sensors like gas monitors, radiation detectors, or tiny RFID readers, all indoors, for smart buildings and logistics.
Gesture and Object Tracking: Computer vision decks enable interactive robotics projects, allowing drones to follow hand gestures, track moving people, or scan QR codes throughout an office or lab.
Key Specs (For the Tinkerers)
Spec
Crazyflie 2.1 Brushless
Crazyflie 2.1+
Motor Type
Brushless 08028-10000KV (30g thrust)
Brushed
Flight Time
10 min
~7 min
Max Payload
40g
15g
Weight
32-37g (w/ guards/legs)
29g
Open Source Ecosystem
Yes
Yes
The Crazyflie 2.1 Brushless as an Enabler
The Crazyflie 2.1 Brushless has proven itself as an enabler for rapid experimentation, reproducible robotics, and ambitious research, where safety, precision, and repeatability matter. Its robust platform, expanded payload, and enhanced flight time make it a micro drone of choice for anyone building the next wave of intelligent swarms, real-time path planners, or AI-integrated automation systems in contained spaces.
What will the next breakthrough look like? This drone lets the imagination take flight.