ICRA 2026 has wrapped up, and we’re back from a fantastic week in Vienna! Booth 91 was busy from start to finish, and we wanted to put together a short highlight video to share some of what happened — for everyone who stopped by, and for everyone who couldn’t make it this year.
The Swarm Demo
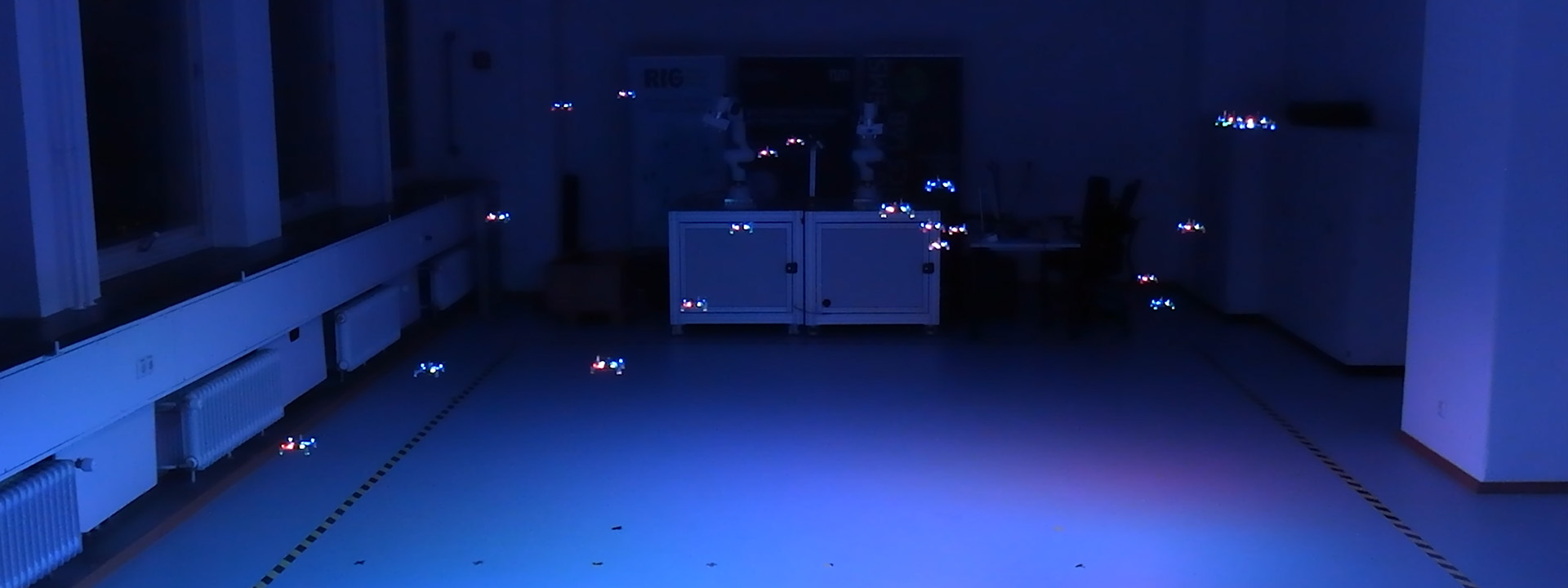
At the center of our booth was our live autonomous swarm demo — multiple Crazyflies flying autonomously in a controlled indoor environment, with everything tracked, repeatable, and stable across runs. We also could play around with our Lighthouse wand – which was also a great solution for troubleshooting the few misbehaving drones we had during those 3 days.
SwarmGPT, Live and Interactive
One of the highlights of the week was demonstrating SwarmGPT together with the Learning Systems and Robotics Lab (LSY) at the Technical University of Munich. SwarmGPT explores a simple but powerful idea: instead of hand-coding trajectories, you describe the intent — pick a piece of music, prompt a style or expression — and the system handles the planning and safety while the swarm performs it.
This time around, we brought a more interactive version of the demo than our end-of-year collaboration a few months back, and visitors got to try it out for themselves at the booth. Watching people prompt the swarm and then watch their idea come to life in the air was a great reminder of how far natural-language interfaces have come, and how much room there still is to explore in this space.
Research We Saw on the Crazyflie
Beyond our own demos, one of our favorite parts of ICRA is talking with our users and seeing what the community has built. This year was no exception — we spotted Crazyflies appearing in research spanning multi-agent coordination, modular micro-UAVs designed for autonomous mid-air docking, and decentralized swarm control approaches where each drone makes its own decisions based on local information rather than a central planner. Some examples include:
- Automatic Lighthouse Calibration using Conics for Indoor Robot Localization; Said Alvarado-Marin; Alexandre Abadie; Martina Balbi; Thomas Watteyne; Filip Maksimovic
- How to model your Crazyflie Brushless Alexander Gräfe, Christoph Scherer, Wolfgang Hönig, Sebastian Trimpe
- Learning to Localize Reference Trajectories in Image-Space for Visual Navigation. Finn Lukas Busch, Matti Vahs, Quantao Yang, Jesús Gerardo Ortega Peimbert, Yixi Cai, Jana Tumova, Olov Andersson
- BlankSkip: Early-exit Object Detection onboard Nano-drones Carlo Marra, Beatrice Alessandra Motetti, Alessio Burrello, Enrico Macii, Massimo Poncino, Daniele Jahier Pagliari
- AirBender: Adaptive Transportation of Bendable Objects Using Dual UAVs Jiawei Xu; Longsen Gao; Rafael Fierro; David Saldaña
It’s always a bit surreal to see the same small quadcopter we ship from our office end up at the center of such different research questions — from choreography and language-driven control, to docking and modular hardware, to fully decentralized swarms. If you presented work involving the Crazyflie this year, thank you for stopping by and sharing it with us — and if you left a poster behind, it’s already found a home on our office wall.
Thanks for Stopping By
ICRA continues to be one of our favorite events of the year, not just for the demos, but for the conversations. Someone describes a challenge they’re running into in their lab, and a few months later, that conversation has often turned into a feature, a library improvement, or a new piece of hardware. If you stopped by booth 91, told us about your research, or just said hello, thank you. We’re already looking forward to the next one!
If you’d like to dig deeper into any of what’s shown in the video, or want to get started with the Crazyflie yourself, head over to bitcraze.io or reach out at contact@bitcraze.io.