Like every summer, things slow down and people starts to go on vacation. This is a perfect time to sit down and start fixing various things that we never have time to fix. We call that the Summer cleanup. This summer there will still be a bit of development though as we are finishing the multiranger deck.
On the cleanup side, there is at least a couple of things we plan to look at:
Updating the virtual machine to the latest Ubuntu version
Looking at the Crazyflie firmware build system to make it cleaner and easier to expand for new platform. There is the RZR and the LPS Tag boards that will come later in the year and will need to be supported by the Crazyflie firmware.
Implementing a startup test that can detect bad propeller and bad batteries. This would improve a lot the experience of flying a Swarm of crazyflies.
We have been continuously improving the webpage last year, this will continue during the summer.
If you have any ideas of areas you feel we should focus on, even better if you want to help with some things and fix it together with us, just tell us in the comment.
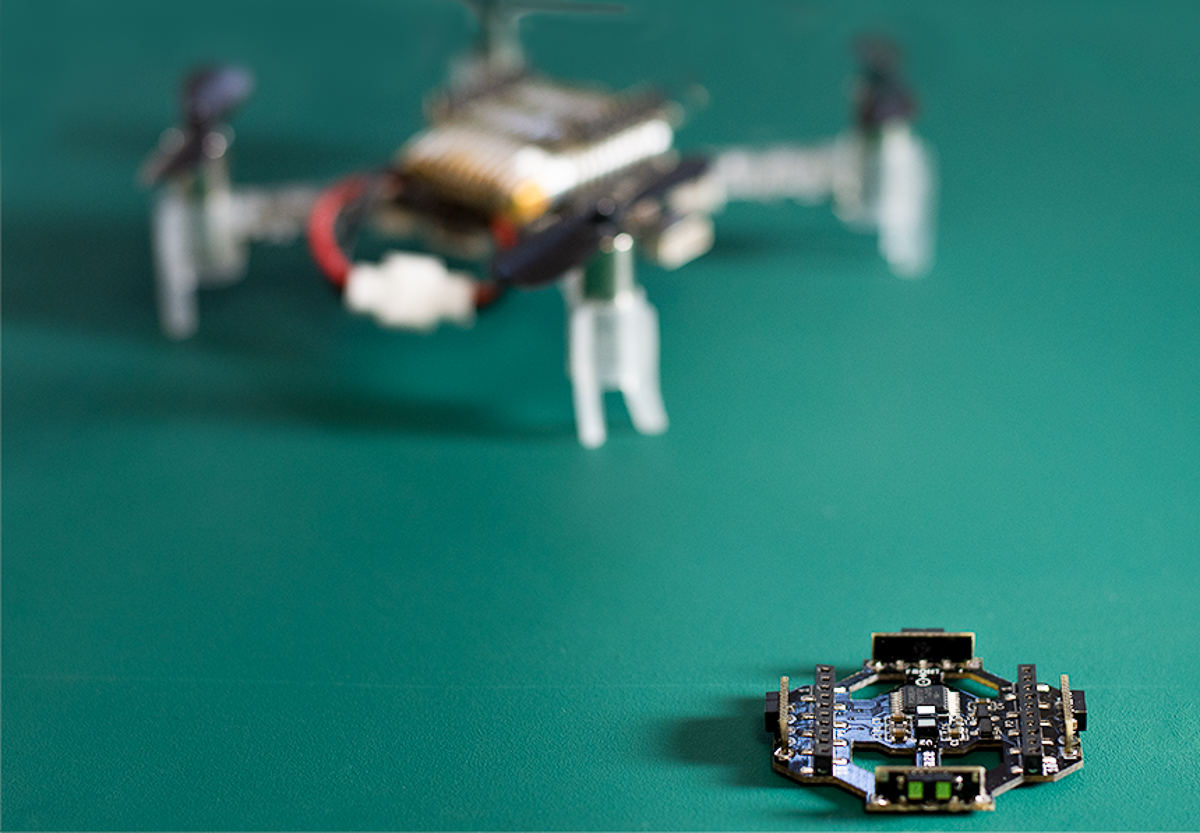
A while ago we bought an HTC Vive for the Bitcraze office. This was partly for having fun with VR, but is was mostly because we had hope to use the vive tracking system with the Crazyflie. We are making progress with the idea and we just received our latest prototype:
The Lighthouse tracking system is the hardware component of steamvr tracking, it is used by the HTC vive to get the full position and orientation of the Vive VR head mounted display and game controllers. It has sub-millimeter precision and low latency, which is key to achieve immersive VR experience. The system works by having base-stations installed in the room. The base station sweeps two rotating infrared laser planes. A receiver is basically a photodiode, by detecting when the photodiode is hit by the sweeping lasers, the receiver can measure at which angle it is seen by the base station. With enough receivers and/or base-stations, it is possible to calculate the receiver position and orientation. If you want to read more about how lighthouse works, there has been awesome work of reverse engineering and documentation made by the open-source community.
As far as Crazyflie is concerned the lighthouse system has one major advantage: the position and orientation can be calculate in the tracked object which means that the Crazyflie can be completely autonomous and there is no limit in the number of Crazyflies that can be tracked at the same time.
Lighthouse has been my fun-Friday project for a couple of month and the early results are very encouraging.This is still very much work in progress, so stay tuned for future blog-posts about the subject :-).
The Bitcraze Virtual Machine is designed as a quick and isolated way to start development with Crazyflie and other bitcraze projects.
The current VM is starting to get very old, even though we keep it updated it is based on XUbuntu LTS 14.04. This month Ubuntu LTS 18.04 is being release which is a good reason to upgrade the VM!
The main update will then to switch from XUbuntu 14.04 to XUbuntu 18.04. There is a couple more things that we are looking at updating:
Updating Eclipse and CDT to the latest version Oxygen.3a
Fixing Eclipse code completion and hinting configuration
Pre-configuring eclipse with gnu-mcu-eclipse to make it easier to flash and debug Crazyflie.
Fixing the virtual machine Crazyradio communication bugs
We are writing this blog post as a request for comment:
Is there anything else that you would like to add/remove in the new virtual machine?
Anything we could do to make it easier to start developing for Crazyflie?
The virtual machine is generated automatically using packer and VirtualBox, the code is hosted on GitHub. If you want to help making the VM or want functionality to be added to it do not hesitate to open a ticket in the bug tracker.
We though we could use this Monday blog post to do a small state of the Crazyflie clients. What we call a Crazyflie client is a piece of software that connects a Crazyflie and allows to control it and get telemetry back from it. In this post we will concentrate on single-crazyflie client we have on our GitHub page, there exists a lot of libraries and software to control one or many Crazyflies, we will write another blog post about them.
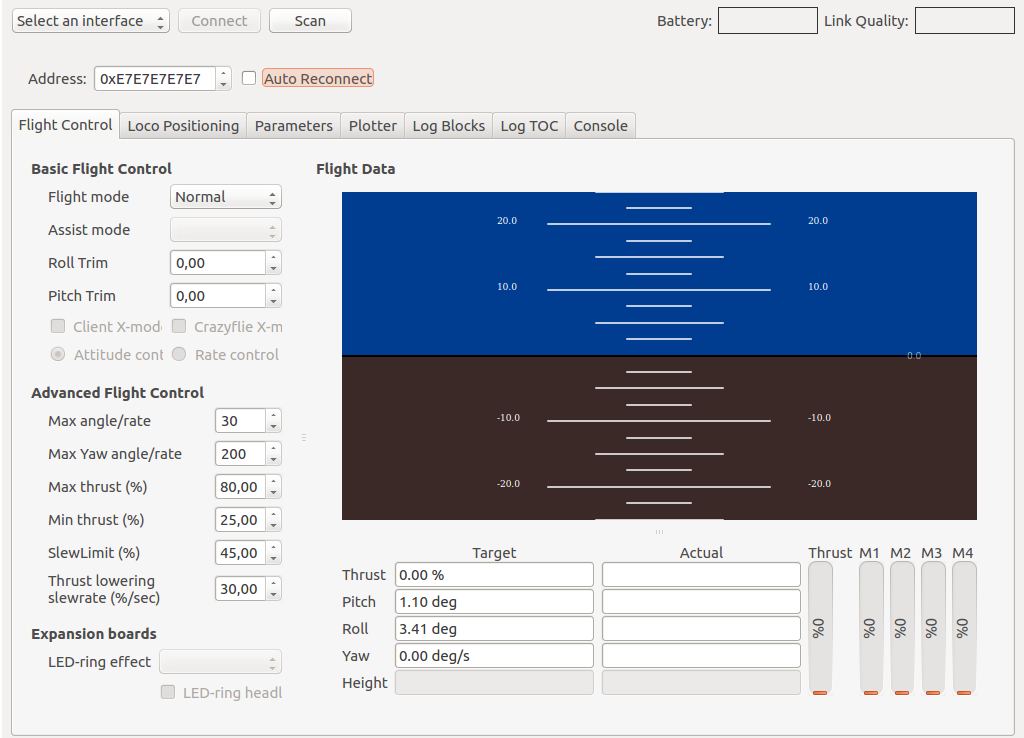
Crazyflie PC client
The Crazyflie PC client, is what we consider the reference client. It supports connecting one Crazyflie using the Crazyradio (PA) dongle or direct USB connection to Crazyflie 2.0. It supports the full Crazyflie telemetry (ie. log), parameters (ie. params) and firmware update. It has support for all the Crazyflie 2.0 deck that can use client support. It is updated each time it is needed when new functionalities are added in the Crazyflie which makes it actively developed and maintained by the community and Bitcraze. A bluetooth link has not been prioritize so far since its multi-platform implementation is non-obvious and bluetooth will introduce some latency and lower the radio bandwidth compared to Crazyradio. However, if anyone would want bluetooth support for the Crazyflie PC client, we welcome contributions :-). The Crazyflie PC client is using the crazyflie-lib-python to communicate with the Crazyflie.
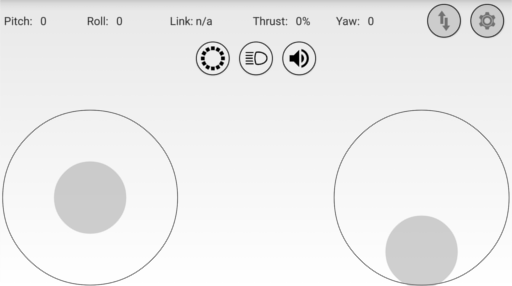
We have three mobile clients on our Github. They have various level of functionality depending on community involvement. Our philosophy is to have the mobile clients at least able to control a Crazyflie, this allows to use them to test Crazyflies without requiring to setup a computer. We will help and support anyone that is interested in adding functionalities to the mobile clients but we generally do not have time to add much functionalities by ourselves.
The Andoid crazyflie client is currently maintained by Fred from the community. It is mobile Crazyflie client with the most feature. It supports both Crazyradio and Bluetooth link. Using Crazyradio it currently supports the part of telemetry and parameter required to support a couple of deck like the led-ring and buzzer deck and supports updating the firmware. Using bluetooth there is currently no telemetry, parameter or firmware update functionality so no deck support. Development is in progress to support more decks and to bring the bluetooth link to the same functionality as the Crazyradio link. The Android client is written in Java and Fred has developed a Crazyflie Java library that is used in the Android client but that can also be used in any other Java program.
Crazyflie Android client
The iOS Crazyflie client, works on iPhone and iPad. It supports bluetooth link. It does not have any telemetry or parameter support, so no deck control support. It has firmware update support over bluetooth. It has mainly been developed by me with great contributions from the community for, among others, the port to swift. The iOS client is written in swift. The Crazyflie and Bluetooth part of the code could be a good starting point if anyone wanted to make a native mac Crazyflie client.
Crazyflie iOS client
Finally we have a prototype of a Windows UWP client developed by theseankelly. It supports Bluetooth low energy. It currently does not supports any telemetry or parameters. It is working both on Windows phone and on Windows 10 on computer, it is currently the only way to connect a Crazyflie using Bluetooth from a laptop. The windows client supports manual control of the Crazyflie using a gamepad or with gesture using HoloLens. This original set of functionality makes it both the most simple and the most advanced Crazyflie client :-).
If you are interested in developing for any of these client, of by making your own, feel free to make a ticket on the relevant github repo or open a thread in the forum. We migh not have much time to develop for the mobile clients, but we will always be glad to help and guide anyone that wants to implement software in relation with the Crazyflie. The Crazyflie clients (running in a computer or phone) and the Crazyflie firmwares (running in the Crazyflie itself) are open source and in active development, it means that is possible to modify both side, this makes it a great target to experiments and to play around with new ideas :-).
We have seen a big interest in flying swarms of Crazyflies and there are many challenges in doing so. The USC ACT Lab has developed Crazyswarm, a collection of software and firmware that allows to fly big swarms of Crazyflie using a motion capture system. This project has been used by USC and other universities to fly the most impressive swarms of Crazyflie 2.0 to date.
We are very happy that we together with Wolfgang and James, the main developer of Crazyswarm, have started to merge the firmware part into the official Crazyflie firmware. Merging the code will have two great consequences: people will be able to use Crazyswarm with a Crazyflie 2.0 running the stock firmware and everybody else will be able to use functionalities that has been developed for Crazyswarm.
There is currently a couple of parts that are in the works. The state controller has been merged already. There is currently some discussion on Github on how to merge the high-level commander, a commander that would allow the Crazyflie to autonomously follow trajectories as well as other high level commands. Finally there will be some work required to adapt the Kalman filter to make it more suited to accepts measurements from a motion capture system. The Crazyflie was not developed as an autonomous platform from the beginning but it is becoming one in big part thanks to the great contributions from the community.
A great thanks to James and Wolfgang for their effort in merging CrazySwarm in the Crazyflie code-base!
Out of stock
Unfortunately we miscalculated how much China slows down during Chinese new year which has caused some products to become out of stock. One of them is the Crazyradio PA which is also causing some bundles to become out of stock as well. The good news is that the products are in transit to the warehouse and will hopefully be back in stock any day now. Until then you can use the “Item out of stock – notify me!” functionality to get notified as soon as the product is back in stock.
We just released a new version of the Bitcraze VM, version 2018.01. Nothing very new in this version, the VM has been rebuilt so that all the projects included in it are now up-to-date. This solves an issue where the Crazyflie client was blocked in the previous revision.
The current VM is running a quite old version of Ubuntu, the 14.04 LTS version. We are planning at refreshing the VM by making a new one when Ubuntu 18.04 LTS is released.
Since the Crazyflie 1 time we have been documenting the VM as a standard development environment. This has a couple of advantages:
We can distribute a fully setup development environment that has minimal dependencies with the host system
If someone has a problem with the VM, there is a bit chance we can reproduce and fix it, everyone is running the same system
Everything is pre-setup so it should be fairly quick to get started with the actual firmware or software development
However the VM solution also has drawbacks:
It requires to install and somewhat configure VirtualBox or other virtual machine software
It has some cost in performance, mostly for USB as it slows down the communication with the Crazyflie
The USB implementation seems to have bugs on Windows, which makes the communication with the Crazyflie buggy. This is currently the biggest problem!
So, the situation is not ideal, and we would love to get some feedback from the community.
There are two very different parts in the system: the lib and client in Python, and the firmwares in C.
Starting development of the python parts, on Windows/Mac/Linux, is fairly straightforward. Basically one has to install python and git, clone the projects, install dependencies and it runs. Different python IDEs can be used and work pretty much out of the box.
Starting development for the embedded C part can be a bit more challenging. On Linux and Mac it is pretty easy since it only requires to download the arm-embedded-gcc compiler and adding it to the path. On windows things are a bit more complex because you also need Make and I haven’t yet figured-out the best way to install that. Having an IDE requires to configure Eclipse CDT.
What do you think about the VM as a development environment and would you prefer other solutions like documentation for each operating system on how to install a development environment?
We have been writing a couple of times already about the new TDoA2 algorithm for the Loco Positioning System. A TDoA mode has been experimental from the day we released the LPS but we are now proud to announce that TDoA is an official positioning mode for the Loco Positioning System and the Crazyflie.
Practically it means that the Loco Positioning System now has an officially supported mode to locate and fly a swarm of Crazyflie 2.0.
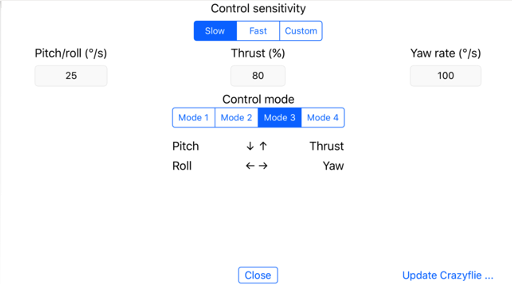
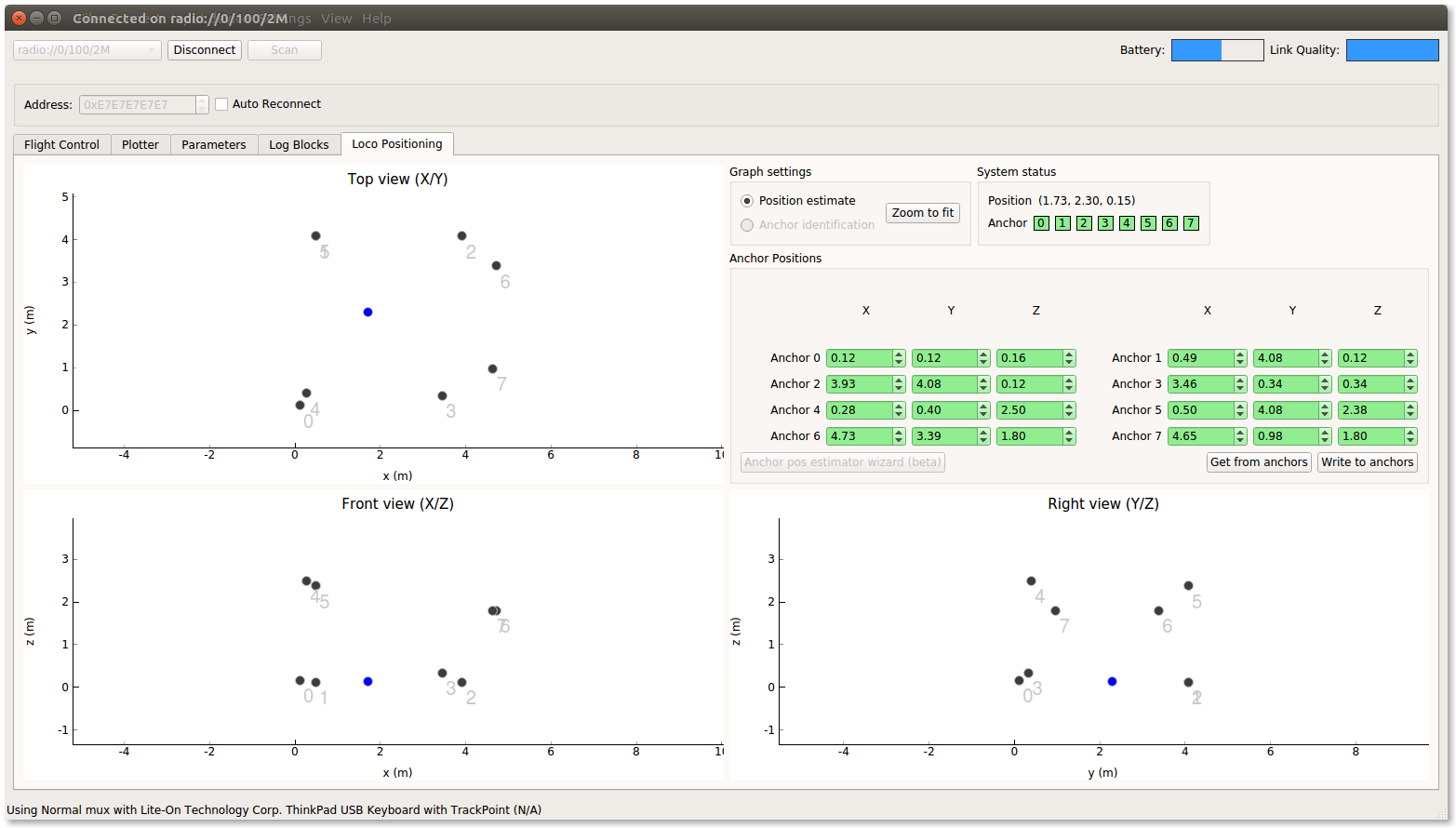
We have worked these last weeks at updating documentation, the “Getting started” tutorial and releasing all the affected firmware and software. One of our goals was to make the new TDoA mode as seamless and as easy as possible to work with, this meant having everything working without having to recompile the Crazyflie or any other part of the system. The Crazyflie is now detecting the LPS mode automatically and it is possible to configure the anchors position and ranging mode remotely from the within Crazyflie client LPS tab.
If you have 8 anchors and want to convert your local positioning system to TDoA, this can be done very easily by following the new version of the getting started with loco positioning system guide.
If you want more information about the different positioning modes, we have also updated the system description.
A couple of weeks ago, I was visiting 34C3, the Chaos Communication Congress, with Fred. The trip was not ‘official’ business for Bitcraze but more of a personal interest, the Congress is a great place to be and I hope to be able to go next year. While there, we found out that Foosel was there too, she is the developer and maintainer of the Octoprint project (Our 3D printer would be much less useful without Octoprint …). It was awesome to finally meet her in real life, she has been in the Crazyflie comunity since the beginning and we have never been able to meet even though we did a couple of maker faire in Germany.
Meeting the community in person is always awesome, this is one of the best part of going to conferences.
At the end of the month we will be at FOSDEM in Belgium, Fred will be there too, he is planning to demo Crazyflie at the Eclipse booth. If anyone else is coming please let us know, we can improvise a Crazyflie meetup there.
Later in the year, in good Bitcraze style, we have not planned anything yet. Last year we went to ICRA which was a very good experience and we might be leaning for IROS this year. Let us know if there is any conference at which you would like to meet us and we will consider going.
The Loco Positioning System (LPS) default working mode is currently Two Way Ranging (TWR), it is a location mode that has the advantage of being pretty easy to implement and gives good positioning performance for most use cases and anchor setups. This was a very good reason for us to start with it. Though, TWR only supports positioning and flying of one or maybe a couple of Crazyflies, while it is not a solution to fly a swarm.
One solution to fly a swarm is an algorithm called Time Difference of Arrival (TDoA). We have had a prototype implementation for a while but we experienced problems with outliers, most of them where due to the fact that we where loosing a lot of packets and thus using bad data.
To solve these issues, TDoA2 makes two changes:
Each packet has a sequence number and each timestamps is associated with the sequence number of the packet it has been created from
The distances between anchors are calculated and transmitted by the anchors
A slightly simplified explanation follows to outline why this helps (a more detailed explanation of how TDoA works is available in the wiki).
We start by assuming that all timestamps are available to the tag, this is done by transmitting them in the packets from the anchors to the copter.
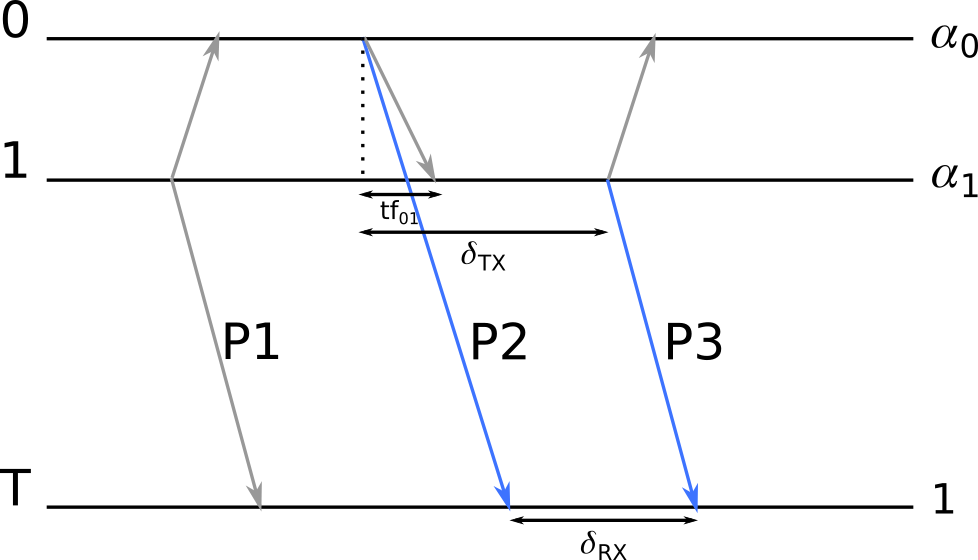
The end goal is to calculate the difference of time of arrival between two packets from two different anchors. Assuming we have the transmission time of the packets in the same clock, all we need to do is to subtract the time between the two transmissions with the time between the two receptions:
0 – anchor 0, 1 – anchor 1, T – Tag (that is the LPS deck on the Crazyflie)
To do so we need to have the time it took for the packet to travel between the two anchors, this will enable us to calculate the transmit time of P2 in anchor 1, this can be done by calculating the TWR time of flight between the two anchors, this would require the tag to receive 3 packets in sequence:
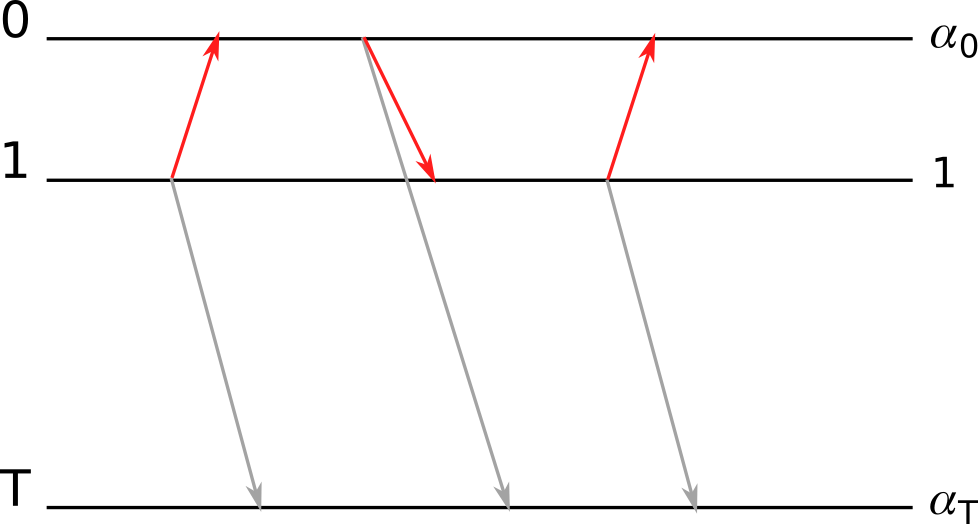
So now for the part where TDoA2 helps: previously we had to have the 3 packets in sequence in order to calculate a TDoA, if any one of these where missing the measurement would fail or worse, it could give the wrong result. Since we did not have sequence numbers, it was hard to detect packet loss. Now that we have sequence numbers, we can understand when a packet is missing and discard the faulty data. We also do not have to calculate the distance between anchors in the tag anymore, it is calculated by the anchors themselves. This means that we can calculate a TDoA with only two consecutive packets which increases the probability of a successful calculation substantially.
To reduce packet loss even more, we have also added functionality to automatically reduce the transmission power of the NRF radio (the one talking to the Crazyradio dongle) when the LPS deck is detected. It has turned out that the NRF radio transmissions are interfering with UWB radio reception, and since most indoor use cases does not require full output power we figured that this was a good trade-off.
The results we have seen with the new protocol is quite impressive: TDoA is usually very sensitive to the tag being inside the convex hull, so much so that with the first TDoA protocol we had to start the Crazyflie from about 30cm up to be well within the convex hull. This is not required anymore and the position is still good enough to fly even a bit outside of the convex hull. The outliers are also greatly reduced which makes this new TDoA mode behave very close to the current TWR mode, but with the capability to locate as many Crazyflies as you want:
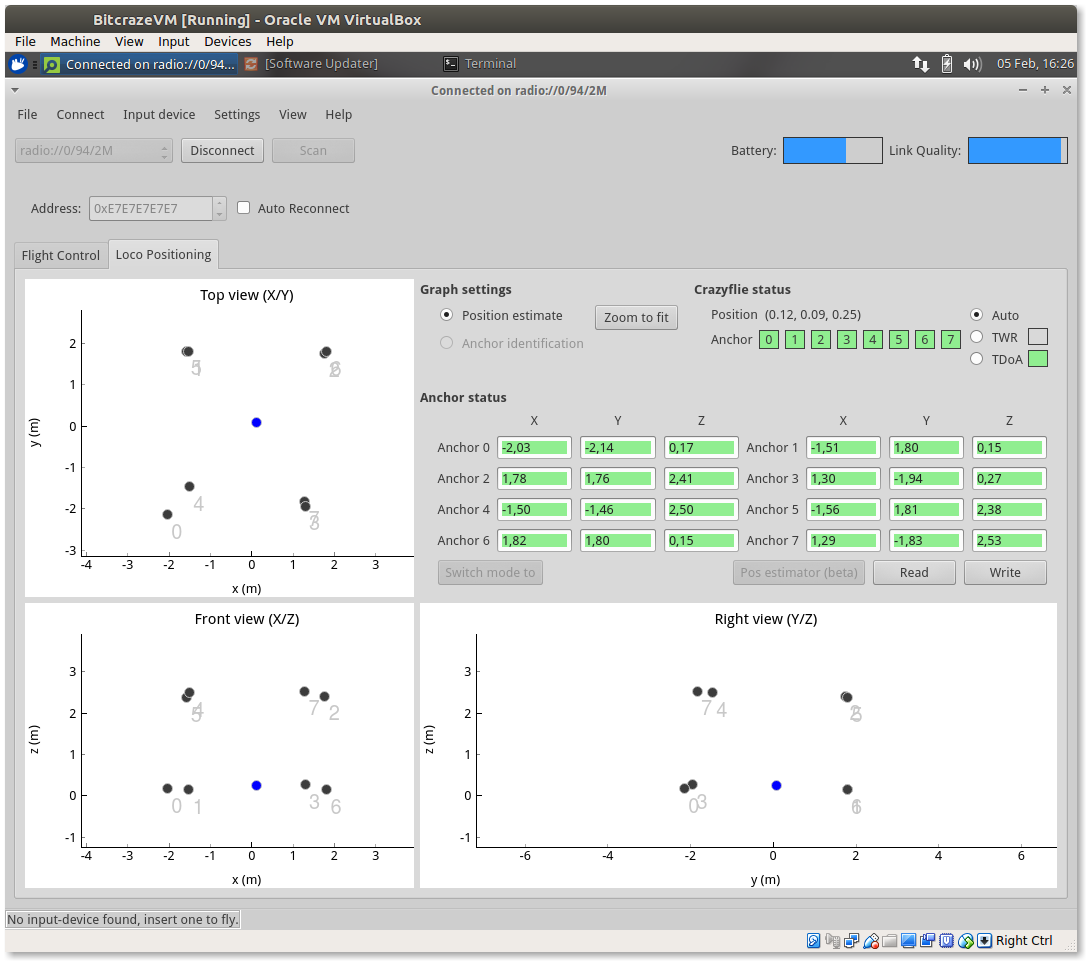
Added to that, we have also implemented anchor position handling in the TDoA2 protocol and this means that it is now as easy to setup a system with TDoA2 as with TWR:
We are now working on finishing the last functionality, like switching between algorithms (TWR and TDoA) and on writing a “getting started guide”. When that is done TDoA will become an official mode for the LPS.
In the mean time, if you are adventurous, you can try it yourself. It has been pushed in the master branch of the Crazyflie firmware and the LPS node firmware. You should re-flash the Crazyflie firmware, both STM32 and nRF51, from master and the anchors from master too.
It has been a while since we have made a blog post about the the community and quite a lot has happened, and is about to happen, so we though we would do an update for this Monday post.
Fred, the Crazyflie android client community maintainer was visiting us last week. He is making great progress on the Java Crazyflie lib that is going to be used in the Android client as well as in PC clients. The lib is still experimental but when finished it will allow to connect and use a Crazyflie from any Java program, there has already been some successful experimentation done using it from Processing.
Thanks to Sean Kelly, the Crazyflie 2.0 is now officially supported by the Betaflight flight controller firmware. Betaflight is a flight controller firmware used a lot in the FPV and drone racing community. This is the announcement by theseankelly in the forum:
Betaflight 3.2 was officially released this month. This is the first release that contains the Crazyflie 2.0 target by default, so you don’t need to clone and build from source anymore. It’s available as a target in the betaflight configurator from the google chrome store! I’ve tested it out and it works as expected. Haven’t tested the BigQuad variant, but that’s also available in the app by default.
The Crazyswarm project, by Wolfgang Hoenig and James A. Preiss from USC ACTlab has been presented at ICRA 2017. It is a framework that allows to fly swarms of Crazyflie 2.0 using a motion capture system. There is currently some work done on merging the Crazyswarm project into the Crazyflie master branch, this will make it even easier to fly a swarm of Crazyflie. In the meantime the project is well documented and can be used by anyone that has a couple of Crazyflies and a motion capture system.