Last week we reached a milestone for our Loco Positioning System: we got 5 Crazyflie 2.0 to fly in a swarm with Time Difference of Arrival measurements. This is a great step closer to making the LPS leave the early-access state.
Until now, positioning has been done using a method called Two Way Ranging (TWR). The advantage of TWR ranging is that it allows us to easily get ranges to the anchors by actively pinging them in sequence. Based on these ranges we can then calculate the current Crazyflie position and control the Crazyflie to move to a wanted position. The big drawback though is that since each Crazyflie has to actively transmit packets to ping anchors, flying many Crazyflie means sharing the air and so the more we want to fly the less ranging each Crazyflie can do. In other words: it does not scale.
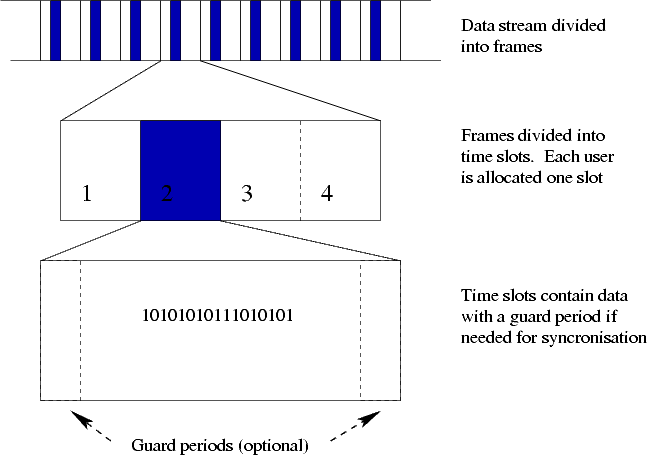
TDoA measurement consist of measuring the difference of flight time between packets coming from different anchors and this is harder to achieve since the anchor clocks must be synchronized to each other. The killer feature of TDoA is that it can be implemented using unidirectional packet sent from the anchor system and received by the tag/Crazyflie. It means that as soon as you get one Crazyflie flying with TDoA, you can get as many as you want since the Crazyflies do not have to transmit anything.
This is what happened last week: on Thursday evening we got 1 Crazyflie to fly with TDoA measurements. On Friday we tried 3 and then 5 without much effort. It was just matter of modifying the ROS launchfile to connect more crazyflies, a copy-paste operation.
First #crazyflie #swarm flight with TDoA and #locopositioning. Friday fun! pic.twitter.com/fRmbE9PfHU
— Bitcraze (@Bitcraze_se) November 25, 2016
Then
TDoA scales! Bigger #swarm. 5 #crazyflies with #locopositioning pic.twitter.com/nacgRGrucp
— Bitcraze (@Bitcraze_se) November 25, 2016
There still seems to be a margin for progression to get even more stable flight with TDoA and we are also working on making the LPS and Swarm work with our Python client which will make it easier to use outside a robotic lab.
If you want to try the (very experimental!) TDoA mode with your loco positioning system we have documented how to get it to work on the wiki.
Thanks a lot to the growing community that is supporting us and allow us to move faster towards a Crazyflie swarm.