Announcement: We will have a townhall meeting this Wednesday (7th of December) about Crazyradio 2.0 and the ideas about the new com-stack at 15:00 (3 pm) CET. Please follow the discussion here for more info.

As you have been very much aware of already if you have been reading the blog occasionally is that we went to Japan with the entire company to be at the International Conference on Intelligent Robots and Systems (IROS) in Kyoto, Japan. Besides eating great food, singing karaoke, and herding our fully onboard autonomous swarm at our stand, we also had some time to check out what kind of work was done with the Crazyflie in the proceeding papers and talks!
So just some generic statistics first:
- IROS had 1716 papers accepted
- We found 14 Crazyflie papers/posters and 2 workshop papers
- The three biggest topics we found the papers in were: SLAM, Multi-robot systems and Navigation & Motion planning, SLAM
At ICRA this year, we noticed that the Crazyflie/bolt were used to make unconventional platforms, like a mono-copter or transforming the Crazyflie to a Pogo stick. It was interesting to see that now at IROS, the focus seemed to be more on navigation, localization and even SLAM… also with unconventional sensors!
Navigation and SLAM with the Crazyflie
In the summer I (Kim) worked on a summer project with using ROS2 to try SLAM with the standard packages with the Flow deck and Multi-ranger. This was also to present the work at ROScon before that with the Crazyswarm2 project, the Crazyflie can be used as an actual robotic platform too! I’m glad that some researchers already figured this one out already, as there were quite some papers on SLAM! [6] and [12] made use of the flow & multi-ranger but made their own custom algorithms to do SLAM and mapping that was more tailored to the task than the standard SLAM packages out there meant for 360 degree lidars.
Very interestingly, there were several papers that uses unconventional sensors for this as well. [5] used a gas sensor to do both gas source localization and distributing mapping and [10] made their own echolocation deck with buzzer + microphones. Let’s see what other sensors will be explored in the future!
Safe Robot Learning Competition
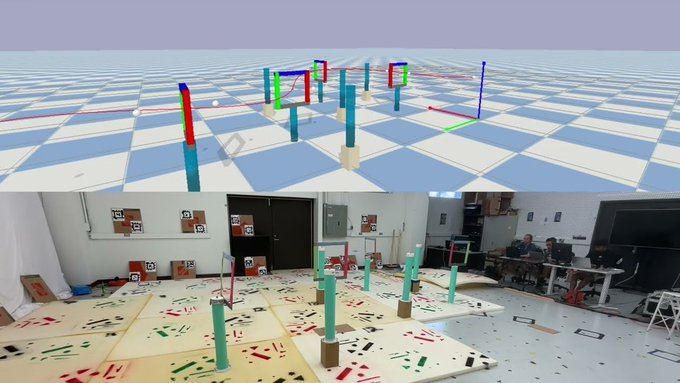
A special mention goes to the Safe Robot Learning competition, organized by the joined TU Munich and Utoronto’s the Learning system & robotics lab (formally known as the Dynamic Systems lab). In this competition, teams could participate with an online competition where they had to finish an obstacle course in simulation. From those that were successful, the finals were done with a real Crazyflie at a remote testbed in the University of Toronto, where the algorithms were put to the ultimate test! The simulation was done in the safe-control-gym framework [12], and the communication with the real Crazyflie was done with the ROS1 based Crazyswarm. We sponsored the first three places with a couple of Crazyflie bundles, so congrats to the winners!
List of IROS 2022 Papers featuring the Crazyflie
- Using Simulation Optimization to Improve Zero-shot Policy Transfer of Quadrotors Sven Gronauer, Matthias Kissel, Luca Sacchetto, Mathias Korte and Klaus Diepold
- Technical University of Munich
- Arxiv
- IEEE Xplore
- Downwash-aware Control Allocation for Over-actuated UAV Platforms Yao Su , Chi Chu , Meng Wang , Jiarui Li , Liu Yang , Yixin Zhu , Hangxin Liu
- Beijing Institute for General Artificial Intelligence (BIGAI)
- ArXiv
- IEEE Xplore
- Towards Specialized Hardware for Learning-based Visual Odometry on the Edge Siyuan Chen and Ken Mai
- Beijing Institute for General Artificial Intelligence (BIGAI)
- IEEE Xplore
- Polynomial Time Near-Time-Optimal Multi-Robot Path Planning in Three Dimensions with Applications to Large-Scale UAV Coordination Teng Guo, Siwei Feng and Jingjin Yu
- The State University of New Jersey
- ArXiv
- IEEE Xplore
- Video
- GaSLAM: An Algorithm for Simultaneous Gas Source Localization and Gas Distribution Mapping in 3D Chiara Ercolani, Lixuan Tang and Alcherio Martinoli
- Ecole Polytechnique Federale de Lausanne (EPFL),
- IEEE Xplore
- Efficient 2D Graph SLAM for Sparse Sensing Hanzhi Zhou, Zichao Hu, Sihang Liu and Samira Khan
- University of Virginia
- Preprint PDF
- IEEE Xplore
- Avoiding Dynamic Obstacles with Real-time Motion Planning using Quadratic Programming for Varied Locomotion Modes Jason White, David Jay, Tianze Wang, and Christian Hubicki
- Florida State University
- IEEE Xplore
- Dynamic Compressed Sensing of Unsteady Flows with a Mobile Robot Sachin Shriwastav, Gregory Snyder and Zhuoyuan Song
- University of Hawaii at Manoa, Honolulu
- ArXiv
- IEEE Xplore
- A Framework for Optimized Topology Design and Leader Selection in Affine Formation Control Fan Xiao, Qingkai Yang, Xinyue Zhao and Hao Fang
- Beijing Institute of Technology
- IEEE xplore
- Blind as a bat: audible echolocation on small robots Frederike Dumbgen Adrien Hoffet Mihailo Kolundzija Adam Scholefield Martin Vetterli
- Ecole Polytechnique Federale de Lausanne (EPFL)
- IEEE xplore
- Safe Reinforcement Learning for Robot Control using Control Lyapunov Barrier Functions Desong Du, Shaohang Han, Naiming Qi and Wei Pan
- Harbin Institute of Technology + TU Delft + University of Manchester
- Late breaking result poster
- Parsing Indoor Manhattan Scenes Using Four-Point LiDAR on a Micro UAV Eunju Jeong, Suyoung Kang, Daekyeong Lee, and Pyojin Kim
- Sookmyung Women’s University,
- Late breaking result poster
- Interactive Multi-Robot Aerial Cinematography Through Hemispherical Manifold Coverage Xiaotian Xu , Guangyao Shi , Pratap Tokekar , and Yancy Diaz-Mercado
- University of Maryland
- Note: Only mention of Crazyflie experiments in presentation
- Safe-control-gym: a Unified Benchmark Suite for Safe Learning-based Control and Reinforcement Learning in Robotics Zhaocong Yuan, Adam W. Hall, Siqi Zhou, Lukas Brunke, Melissa Greeff, Jacopo Panerati, Angela P. Schoellig
- University of Toronto
- Note: Used in the IROS 2022 Safe Robot Learning Competition with the Crazyflie
- IEEE Xplore
- Distributed Geometric and Optimization-based Control of Multiple Quadrotors for Cable-Suspended Payload Transport Khaled Wahba and Wolfgang Hoenig
- TU Berlin
- Workshop paper Decision making in multi-agent systems
- Customizable-ModQuad: a Versatile Hardware-Software Platform to Develop Lightweight and Low-cost Aerial Vehicles Diego S. D’Antonio, Jiawei Xu, Gustavo A. Cardona, and David Saldaña
- Lehigh university
- Workshop paper Miniature Robot Platforms for Full Scale Autonomous Vehicle Research
Let us know if we are missing any papers or information per papers! Once the IEEE xplore IROS 2022 proceedings have been published, we will update these too and put them on our research page.