We’re happy to announce that release 2026.04 is now available. This update introduces a dedicated CRTP port for the supervisor subsystem and a radio startup gate for more reliable early connections, along with a number of smaller bug fixes and quality-of-life improvements. Alongside the release, we’re launching a new crazyflie-demos repository with self-contained examples demonstrating real-world use cases. Thanks to our community contributors for their valuable additions to this release.
Major changes
Demos repository The new dedicated crazyflie-demos repository hosts more complex examples that combine features or subsystems to demonstrate best practices and real-world use cases. Every demo in the new repository is self-contained, with pinned software versions.
CRTP supervisor port A new dedicated CRTP port provides direct access to the supervisor subsystem, consolidating supervisor-related commands that had historically ended up on unrelated ports. Arming, crash recovery, and emergency stop commands now go through this port instead of being spread across the platform and localization ports. The old ports still accept these commands for backward compatibility. The new port also exposes supervisor state (armed, flying, tumbled, crashed, etc.) through a direct query, so clients no longer need to set up a log block just to check supervisor status.
Radio startup gate The STM32 now signals the nRF51 when it’s ready to receive radio packets. Previously, if a client connected during boot, packets could arrive before the firmware was ready to handle them, causing lockups.
Lighthouse calibration saving fix Fixed a bug that made saving lighthouse calibrations unreliable: a signature mismatch in a memory-read failure callback could leave the memory subsystem locked, blocking further reads until reconnect.
We’re happy to announce that release 2025.09 is now available. This update includes Python 3.13 support and improved battery voltage compensation, along with enhanced trajectory control capabilities. The release also features substantial stability and architectural work that lays the groundwork for upcoming features and products. Thanks to our community contributors for their valuable additions to this release.
Major changes
Python 3.13 support Added support for Python 3.13, with preparations already in place to ensure faster compatibility when Python 3.14 releases.
Improved battery voltage compensation Enhanced voltage compensation for Crazyflie 2.1, 2.1+, and 2.1 with thrust upgrade kit provides more consistent flight performance across battery discharge cycles. Crazyflie Brushless battery voltage compensation coming soon. Thanks to @Rather1337 for this contribution.
Manual flight setpoint packet New generic commander packet type for manual flight that allows dynamic switching between Angle and Rate modes for roll and pitch without re-flashing the firmware.
Fully relative trajectories Trajectories can now be initiated relative to the drone’s current yaw, not just position. This enables fully relative trajectory execution where subsequent trajectories maintain the drone’s current orientation. Thanks to @johnnwallace for this contribution.
Modular deck discovery architecture Replaced OneWire-only deck discovery with a modular backend system that supports multiple discovery protocols. This enables future deck communication methods while maintaining full backward compatibility with existing decks.
We’re happy to announce that release 2025.02 is now available. This update includes fixes and improvements for the Crazyflie 2.1 Brushless, along with stability enhancements for the AI-deck.
We are happy to announce that release 2024.10 is now available! Special thanks to our community contributors for their valuable input and code contributions in this release!
Before we start settling down and preparing for Christmas, it’s time for another release! The last one was before the summer in July, and we’ve had quite a few changes on the development master branch that we’d like to share. You can now download the latest Cfclient through pip and install the newest firmware on the Crazyflie to 2023.11 via the CFclient.
Latest changes in CFclient and Cflib
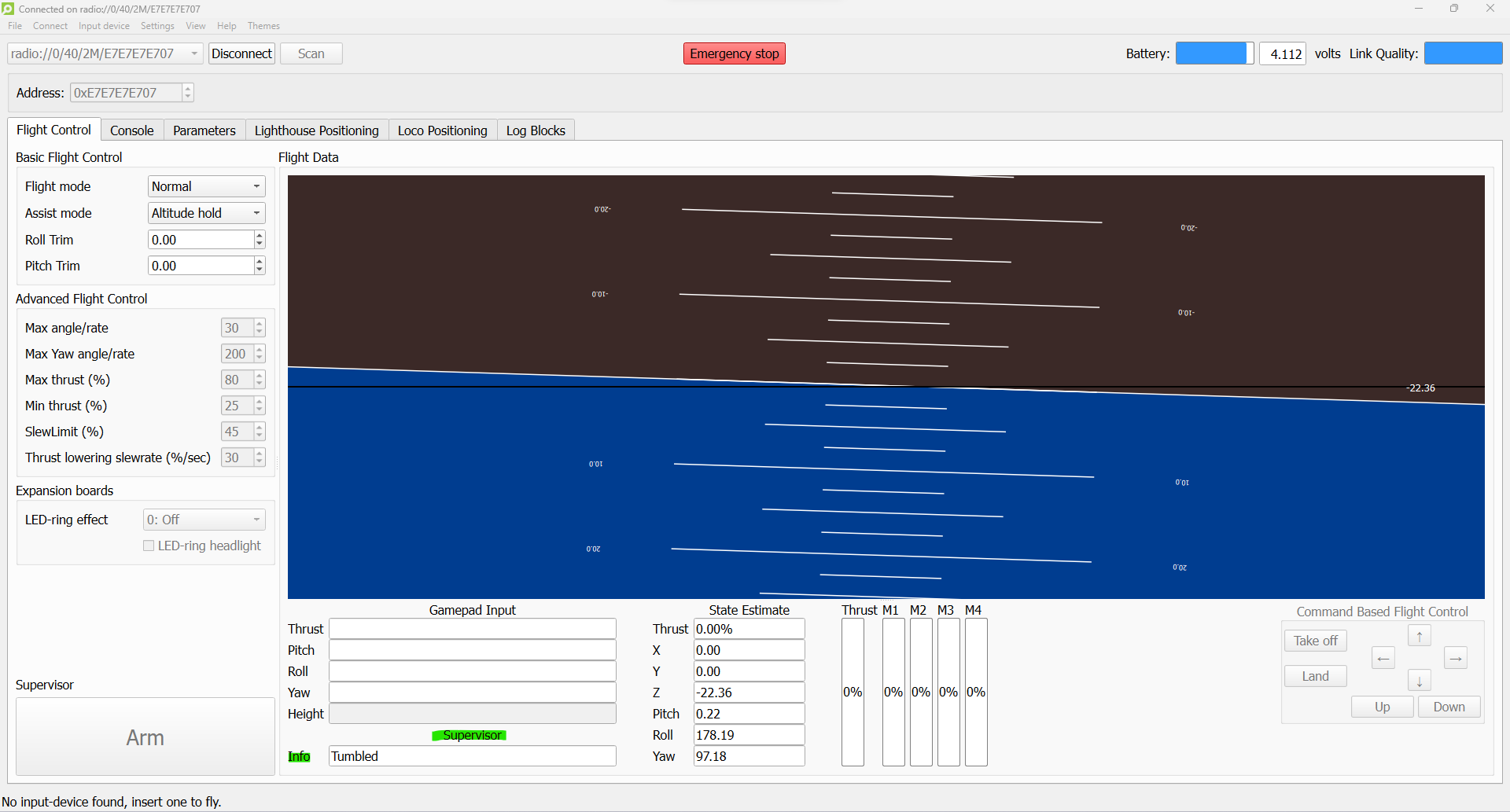
The most significant change in the CFclient is that we have finally transitioned from QT5 to QT6 for the GUI graphics. Additionally, we have addressed some issues with the toolboxes. Finally, we have added an information box to indicate the state of the supervisor, such as whether the Crazyflie is considered tumbled, flying, or if a restart is required because it is locked.
Cfclient when the crazyflie is tumbled with supervisor info
For the backend, namely the Crazyflie Python library, some important changes have been implemented. Along with fixes to the parameter and logging framework, full-state setpoints have been introduced. This feature has existed in firmware for a while due to the Crazyswarm1 project (now Crazyswarm2), but it wasn’t implemented in the cflib until now. Additionally, it’s now necessary to use `notify_setpoint_stop` in cases of switching between high-level setpoints and regular position setpoints. There is also a generic motion capture example now based on the libmotioncapture library.
Note that even though the CFclient has been converted to QT6, there are several examples in the Cflib folder that have not been updated yet. This will be fixed soon, and a ticket has been created for it. Additionally, in the Bitcraze-VM, there have been some reported issues with QT6 (see this ticket).
Latest changes in the firmware
The firmware has undergone some important changes too. On the STM side of things, the hybrid TDOA mode has been merged (check out this recent blog post). This feature is still considered experimental, so please refer to the documentation for the right settings. Additionally, support for the supervisor information box in the CFclient has been added. To utilize it, both the firmware and CFclient need to be updated. There is also a new example demonstrating communication between gap8 and cpx. Last but not least, it is now possible to create Python bindings for portions of the Kalman filter, mainly for the Loco positioning system. On the other hand, the NRF firmware has no added functionalities except for some build changes and fixes.
Crazyradio2 + LPS tools
We’ve also made some improvements in other firmware or tools. Starting with the Crazyradio2, which includes fixes for broadcasting (important for you Crazyswarm2 folks!). We also aimed to make a new release of LPS tools since we heard that people were experiencing issues with USB devices. Unfortunately, there are some problems with the GitHub release actions, so that will likely be delayed. For anyone facing USB issues, you can install the LPS tools from source with Python following the ReadMe’s instructions.
As we already announced last week in the Monday blog post, we will be having a developer meeting this Wednesday (6th Dec, 3 pm CET) regarding the Flow deck (refer to this discussion thread for joining information). Since we usually don’t fill up the entire hour, the last part of the developer meeting is available for some generic support questions face-to-face (online), including questions about the release!
There is a new fresh release of both the firmware and the python library and client! The last release (2022.01) was from 2 months ago but we already added quite some extra functionality so we wanted to make a snapshot of this before continuing on other priorities.
Kbuild on CF firmware
One of the biggest changes that you will notice, is that there is now a new way to configure your Crazyflie firmware before building it. The old config.mk is gone and you will now need to either automatically generate a config file or generate one with the menuconfig, of which kbuild is most known for. For more information, please read the blogpost about this latest change, for the exception that we do prefer the users to use ‘make cf2_config’ as instructed in the 2022.03 version of the repo documentation.
Platform support for Bolt
We now defined the Bolt as a different platform. That means that for each release, there should now also be a bolt flavor zip file, next to the cf2 and tag zips, as you can see in the release page. Moreover, if you want to build the firmware to be Bolt compatible, you would first need to do ‘make bolt_defconfig’ to generate the needed configs with kbuild. For more information of how to add your own custom platform, please check out these instructions.
2+ Lighthouse base stations (experimental)
For those that feel constrained by the max 2 lighthouse base station support in the firmware and client, this functionality is now part of the release. This blogpost will explain more about this, and it is still experimental in nature, as you would need to reconfigure the firmware with… you guessed it: Kbuild! Also the geometry estimation needs to be done as a separate python script as well all from the Crazyflie python library. No worries, if you still prefer using the cfclient, it still uses the old way of estimating if you click the button, but just remember that you would need to do something extra in order to get 2+ base station support.
New VM release
We were also made aware of a pretty big error in the bitcraze VM, namely that we still used the old git:// type url for github repositories. IN the new release of the bitcraze VM this should be fixed, so please download the new one, or fix it yourself in your current VM by changing the remote URLs of the github repos you are working on to https://.
We are thrilled to announce the new 2022.1 release of the Crazyflie firmwares, library and client! There have been a lot of bug fixes, polishing and new features and we are glad we finally get to share it with all of you.
Noteworthy features and fixes
The features and fixes listed here is only a subset of all the bug fixes and other additions we have done in the last six months. For a more complete view, please check the release notes on GitHub.
Along with all the new features, bug fixes and general polish of our software we have also spent time making sure our documentation is up-to-date and relevant! You can check it out on our website. Do not forget to check out the individual repositories documentation. And the tutorial page has gotten some love this cycle, check it out!
Please go forth and install this new release and please file issues with any problem you find!
Where to get it?
The firmware images for the Crazyflie STM firmware and the Crazyflie NRF firmware should already be available through the cfclient. And if you want to download them yourself you can find them at https://github.com/bitcraze/crazyflie-firmware/releases.
The Crazyflie Client and the Crazyflie Python library are available through Pypi (The Python Package Index), to install them you can use the following commands:
$ python3 -m pip install --upgrade cfclient # to install or upgrade the Crazyflie client
$ python3 -m pip install --upgrade cflib # to install or upgrade the Crazyflie Python libraryCode language:PHP(php)