Since the middle of January, Bitcraze has had two additional guests: us! We, Josefine & Max, are currently doing our master thesis at Bitcraze during our final semester at LTH.
Unfortunately, the pandemic means remote working which could have caused some difficulties with hardware and equipment accessibility. Fortunately, for us, our goal with the thesis is to emulate the Crazyflie 2.1 hardware in the open source software Renode. We can therefore do the work at home.
Since this is the first time either of us have tried to emulate hardware it is exciting to see if it will even be possible, especially as we do not know what limitations Renode might have. Thus far, four weeks in, there have been some hiccups and crashes but also progress and success. One example was when we got the USART up and running and it became possible to start printing debug messages and another was when the LED lights were connected and it was possible to see when they were turned on and off.
Example of output from partially implemented hardware.
If all goes well, the emulated hardware could be used as a part of the CI pipeline to automatically hunt for bugs. Academically, it would be used to further study testing methods of control firmware.
Getting a glimpse into the workings at Bitcraze and the lovely people working here has been most interesting and we are looking forward to the time ahead. Until next time, hopefully with a working emulation, Josefine & Max.
This week we have a guest blog post from Bárbara Barros Carlos, PhD candidate at DIAG Robotics Lab. Enjoy!
Quadrotors are characterized by their underactuation, nonlinearities, bounded inputs, and, in some cases, communication time-delays. The development of their maneuvering capability poses some challenges that cover dynamics modeling, state estimation, trajectory generation, and control. The latter, in particular, must be able to exploit the system’s nonlinear dynamics to generate complex motions. However, the presence of communication time-delay is known to highly degrade control performance.
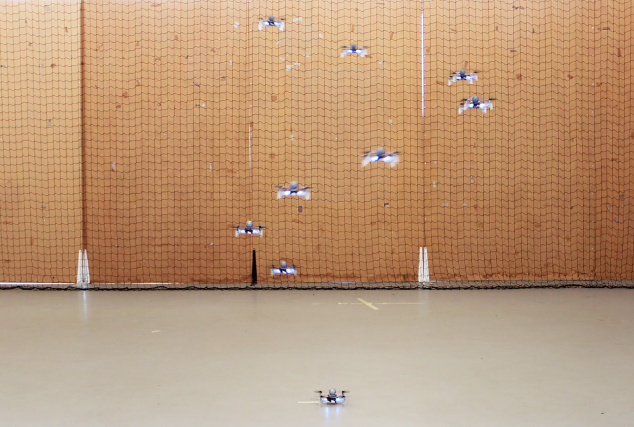
A composite image showing our real-time NMPC with time-delay compensation being used on the Crazyflie during the tracking of a helical trajectory.
In our recent work, we present an efficient position control architecture based on real-time nonlinear model predictive control (NMPC) with time-delay compensation for quadrotors. Given the current measurement, the state is predicted over the delay time interval using an integrator and then passed to the NMPC, which takes into account the input bounds. We demonstrate the capabilities of our architecture using the Crazyflie 2.1 nano-quadrotor.
Time-Delay Compensation
In our aerial system, because of the radio communication latency, we have delays both in receiving measurements and sending control inputs. Likewise, since we intend to use NMPC, the potentially high computational burden associated with its solution becomes an element that must also be taken into account to minimize the error in the state prediction.
Crazyflie NMPC response without considering the time-delay compensation.
To tackle this issue, we use a state predictor based on the round-trip time (RTT) associated with the sum of network latencies as a delay compensator. The prediction is computed by performing forward iterations of the system dynamic model, starting from the current measured state and over the RTT, through an explicit Runge Kutta 4th order (ERK4) integrator. Due to the independent nature of this operation, perfect delay compensation can be achieved by adjusting the integration step to be equal to the RTT. Thus, it is assumed that there is a fixed RTT, defined by τr, to be compensated.
Nonlinear Model Predictive Control
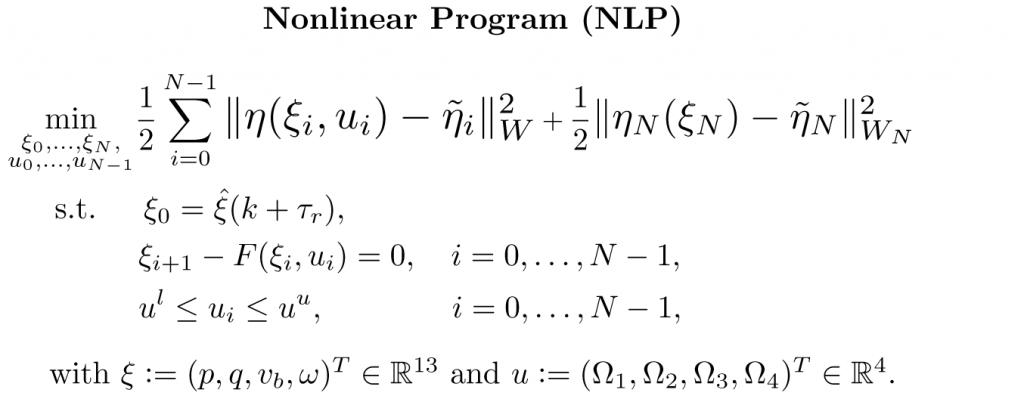
The NMPC controller is defined as the following constrained nonlinear program (NLP):
Therein, p denotes the inertial position, q the attitude in unit quaternions, vb the linear velocity expressed in the body frame, ω the angular rate, and Ωi the rotational speed of the ith propeller. The NLP is tailored to the Crazyflie 2.1 and is implemented using the high-performance software package acados, which solves optimal control problems and implements a real-time iteration (RTI) variant of a sequential quadratic programming (SQP) scheme with Gauss-Newton Hessian approximation. The quadratic subproblems (QP) arising in the SQP scheme are solved with HPIPM, an interior-point method solver, built on top of the linear algebra library BLASFEO, finely tuned for multiple CPU architectures. We use a recently proposed Hessian condensing algorithm particularly suitable for partial condensing to further speed-up solution times.
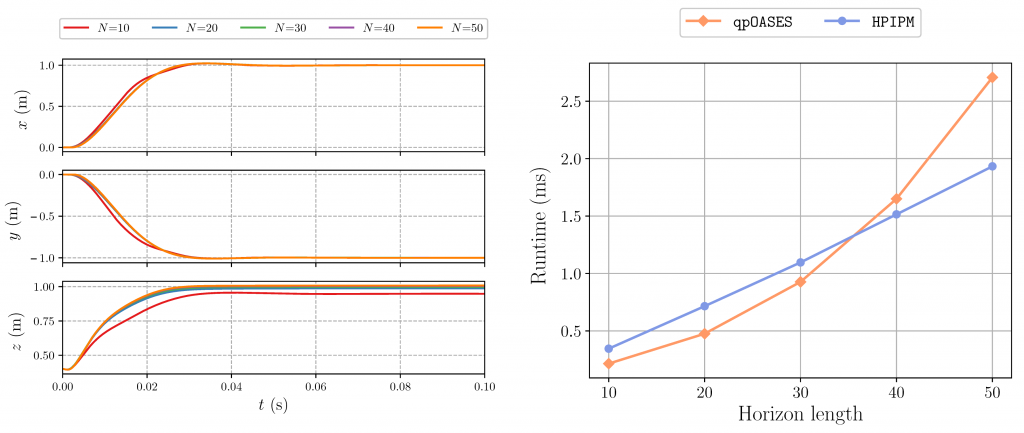
When designing an NMPC, choosing the horizon length has profound implications for computational burden and tracking performance. For the former, the longer the horizon, the higher the computational burden. As for the latter, in principle, a long prediction horizon tends to improve the overall performance of the controller. In order to select this parameter and achieve a trade-off between performance and computational burden, we implemented the NLP in acados considering: five horizon lengths (N = {10,20,30,40,50}), input bounds on the rotational speed of the propellers (lower bound = 0, upper bound = 22 krpm), discretizing the dynamics using an ERK4 integration scheme. Likewise, we compare the condensing approach with the state-of-the-art solver qpOASES against the partial condensing approach with HPIPM, concerning the set of horizons regarded.
Left: closed-loop trajectories comparing different horizon lengths. Right: average runtimes per SQP-iteration for different horizon lengths considering two distinct QP solvers.
As qpOASES is a solver based on active-set method, it requires condensing to be computationally efficient. In line with the observations found in the literature that condensing is effective for short to medium horizon lengths, we note that qpOASES is competitive for horizons up to approximately N = 30 when compared to HPIPM. The break-even point moves higher on the scale for longer horizons, mainly due to efficient software implementations that cover: (a) Hessian condensing procedure tailored for partial condensing, (b) structure-exploiting QP solver based on novel Riccati recursion, (c) hardware-tailored linear algebra library. Therefore, we chose horizon N = 50 as it offers a reasonable trade-off between deviation from the reference trajectory and computational burden.
Onboard Controller Considerations
How the onboard controllers (PIDs) use the setpoints of the offboard controller (NMPC) in our architecture is not entirely conventional and, thereby, deserves some considerations. First, the reference signals that the PID loops track do not fully correspond to the control inputs considered in the NMPC formulation. Instead, part of the state solution is used in conjunction with the control inputs to reconstruct the actual input commands passed as a setpoint to the Crazyflie. Second, a part of the reconstructed input commands is sent as a setpoint to the outer loop (attitude controller), and the other part is sent to the inner loop (rate controller). Furthermore, as the NMPC model does not include the PID loops, it does not truly represent the real system, even in the case of perfect knowledge of the physical parameters. As a consequence, the optimal feedback policy is distorted in the real system by the PIDs.
Closed-loop Position Control Performance
Our control architecture hinges upon a ROS Kinetic framework and runs at 66.67 Hz. The Crazy RealTime Protocol (CRTP) is used in combination with our crazyflie_nmpc stack to stream in runtime custom packages containing the required data to reconstruct the part of the measurement vector that depends on the IMU data. Likewise, the cortex_ros bridge streams the 3D global position of the Crazyflie, which is then passed through a second-order, discrete-time Butterworth filter to estimate the linear velocities.
To validate the effectiveness of our control architecture, we ran two experiments. For each experiment, we generate a reference trajectory on a base computer and pass it to our NMPC ROS node every τs = 15 ms. When generating the trajectories, we explicitly address the feasibility issue in the design process, creating two references: one feasible and one infeasible. In addressing this issue, we prove through experiments that the performance of the proposed NMPC is not degraded even when the nano-quadrotor attempts to track an infeasible trajectory, which could, in principle, make it deviate significantly or even crash.
Overall, we observe that the most challenging setpoints to be tracked are the positions in which, given a change in the motion, the Crazyflie has to pitch/roll in the opposite direction quickly. These are the setpoints where the distortion has the greatest influence on the system, causing small overshoots in position. The average solution time of the tailored RTI scheme using acados was obtained on an Intel Core i5-8250U @ 3.4 GHz running Ubuntu and is about 7.4 ms. This result shows the efficiency of the proposed scheme.
Outlook
In this work, we presented the design and implementation of a novel position controller based on nonlinear model predictive control for quadrotors. The control architecture incorporates a predictor as a delay compensator for granting a delay-free model in the NMPC formulation, which in turn enforces bounds on the actuators. To validate our architecture, we implemented it on the Crazyflie 2.1 nano-quadrotor. The experiments demonstrate that the efficient RTI-based scheme, exploiting the full nonlinear model, achieves a high-accuracy tracking performance and is fast enough for real-time deployment.
Bárbara Barros Carlos1, Tommaso Sartor2, Andrea Zanelli3, and Gianluca Frison3, under the supervision of professors Wolfram Burgard4, Moritz Diehl3 and Giuseppe Oriolo1.
1 B. B. Carlos and G. Oriolo are with the DIAG Robotics Lab, Sapienza University of Rome, Italy. 2 T. Sartor is with the MECO Group, KU Leuven, Belgium. 3 A. Zanelli, G. Frison, and M. Diehl are with the syscop Lab, University of Freiburg, Germany. 4 W. Burgard is with the AIS Lab, University of Freiburg, Germany.
Modular robotics implies in general flexibility and versatility to robots. In theory, you could design a modular robot basically on the way you would want it to be, by simply adding or removing modules from the already existing robot. Changing the robot configuration by adding more individuals, generally increases the system redundancy, meaning that now, there are probably many different ways to achieve a specific goal. From a naive standard point of view, more modules could imply in practice more robustness due to this redundancy. In fact, it does get more robust by the cost of becoming more complex, and probably harder to control. Added to that, other issues may arise when you take into account that your modular robot is flying, and how physical properties and actuation scales as the number of modules grow.
In the GRASP Laboratory at the University of Pennsylvania, one of our focuses is to allow robots to achieve a specific task. In this work, we present ModQuad-DoF, which is a modular flying platform that enlarges the configuration space of modular flying structures based on quadrotors (crazyflies), by applying a new yaw actuation method that relies on the desired roll angles of each flying vehicle. This research project is coordinated by Professor Mark Yim , and led by Bruno Gabrich (PhD candidate).
Scaling Modular Robots
Scaling modular robots is a very challenging problem that usually limits the benefits of modularity. The sum of the performance metrics (speed, torque, precision etc.) from each module usually does not scale at the same rate as the conglomerate physical properties. In particular, for ModQuad, saturation from individual motors would increase as the structures became larger leading to failure and instability. When conglomerate systems scale up in the number of modules, the moment of inertia of the conglomerate often grows faster than the increase in thrust capability for each module. For example, the increase in the moment of inertia for a fifth module added to four modules in a line can be approximated by the mass of the module times half the distance to the center squared. This quadratic increase gives us the intuition that the required yaw actuation grows faster than the actuation authority.
Yaw Actuation
An inherit characteristic of quadrotors is to have their yaw controlled by the drag moments from each propeller. For ModQuad as more modules are docked together, a decreased controllability in yaw is noticed as the structure becomes larger. In a line configuration the structure’s inertia grows quadratically with the distance of each module to the structure center of mass. On the other hand the drag moments produced scales linearly with the number of modules.
The new yaw actuation method relies on the fact that each quadrotor is capable to generate an individual roll enabled by our new cage design. By working in coordinated manner, each crazyflie can then generate structure moments from moment arms provided by the propellers given its roll and its distance from the structure’s center of mass.
Cage Design
The Crazyflie 2.0 is the chosen platform to enable thrust and attitude to the individual modules. The flying vehicle measures 92×92×29 mm and weights 27 g while its battery lasts around 4 minutes for the novel design proposed. In this work the cage performs as pendulum relative to the flying vehicle. The quadrotor is joined to the cage through a one DOF joint. The cages are made of light-weight materials: ABS for the 3-D printed connectors and joints, and carbon fiber for the rods.
Although the flying vehicle does not necessarily share same orientation as the cage, the multiple connected cages do preserve same orientation relative to each other. With the purpose of allowing such behavior, we used Neodymium Iron Boron (NdFeB) magnets as passive actuators to enable rigid cage connections. Docking is only allowed at the back and front face of the modules, and each one of these faces contains four magnets. Those passive actuators have dimensions of 6.35 × 6.35 × 0.79 mm with a bonding force of 1 kg.
Structure Flying Performance
Conclusions
ModQuad-DoF is a flying modular robotic structure whose yaw actuation scales with increased numbers of modules. ModQuad-DoF has a one DOF jointed cage design and a novel control method for the flying structure. Our new yaw actuation method was validated conducting experiments for hovering conditions. We were able to perform two, four and, six modules cooperatively flying in a line with yaw controllability and reduced loss in thrust. In future work we aim to explore the structure controllability with more robots in a line configuration, and exploring different solutions for the desired roll angles. Possibly, with more modules in the structure, only a few would be required to roll in order to maintain a desired structure yaw. Given that, we could explore the control allocation for each module in a specific structure configuration, and dependent on its desired behavior. Further, structures that are not constrained to a line will also be tested using the basis of the controller proposed in this work.
We have a guest blog post this week from Christopher Banks at Georgia Tech, where he tells us about their work with the Robotarium. Enjoy!
Multi-Agent Aerial Robotics
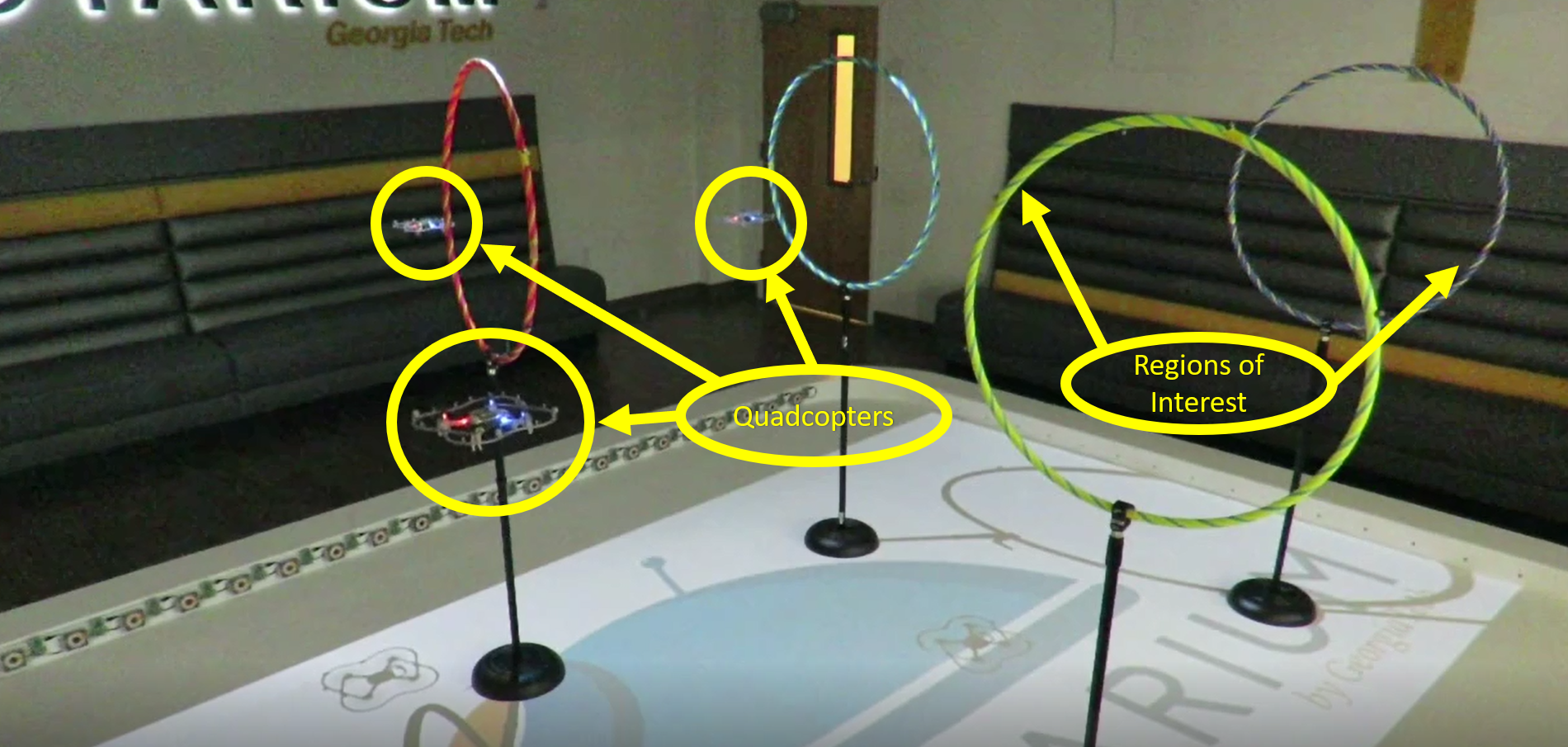
In the GRITS Lab we focus on autonomous control and coordination of multi-robot systems with applications in – but not limited to – optimal control, constraint-based control, and hardware development. We are home to the Robotarium [1], a remotely accessible swarm robotics testbed that is free for anyone around the world to use for academic and educational purposes. We have integrated Crazyflies into the Robotarium as the main vehicle for aerial robot swarms due to their small size, quiet operation, and high maneuverability . Also, due to their low inertia, they pose minimal harm to their surroundings if system failures occur. Their small size and robust nature are well suited for flying in an indoor testbed like the Robotarium. As we work towards extending the operation of the Crazyflies in the Robotarium to external users, we encountered some important research questions: How do we guarantee the quadcopters remain “safe” (undamaged) while minimizing modifications to user inputs? How do we develop an easy to use interface for external users, with experience ranging from novice to expert? What commands can be used by external users to control a swarm of robots? This post will briefly describe the ongoing research aimed at solving these questions.
Safety Guarantees
To ensure hardware safety while flying experimental algorithms we have developed Control Barrier Functions (CBFs) for quadcopters, allowing users to give nominal control inputs while obeying some safety constraints for the system (e.g. collision-free trajectory following). In the video below, we give four Crazyflies the commands to fly in a circle. A fifth Crazyflie is then told to fly to waypoints that will intersect the circle and attempt to collide with the circling quadcopters. Using CBFs a central controller can modify the inputs given to Crazyflies near collision to ensure safe velocity commands that are close as possible to the user intended control [2] . These CBFs can also be designed to ensure safety by bounding the quadcopters to a designated region of the testbed, giving additional safety constraints by protecting areas outside of the motion capture system during flights.
Quadcopters execute pre-planned flight trajectories designed to collide and use CBFs to avoid collisions.
User Interfaces
We have also used the Crazyflies to understand how remote users can best interact with the Robotarium both at the interface level and in planning. One project involved studying the effectiveness of graphical user interfaces (GUIs) on swarm robotic control. Two GUIs were developed with different interaction modalities. The GUIs were designed to map user inputs to a set of hoops placed in the Robotarium. One GUI (shown in Fig. 1) provided users the ability to draw paths through a touchscreen interface on a two-dimensional map and then map those inputs to trajectories for a team of robots. The other GUI (illustrated in Fig. 2) allowed users to input a sequence of desired hoops for a team of robots and execute trajectories based on the input.
Figure 1: A GUI that maps hand-drawn paths to inputs for a group of Crazyflies
Figure 2: A GUI that maps the string of indexed hoops as inputs for a group of Crazyflies.
Multi-Agent Planning
In planning, we looked at how multi-agent planning can be approached using high-level specifications. These high-level specifications allow users to develop plans requiring groups of robots to visit regions of interest (see Fig. 3) and trajectories are generated automatically. To represent these specifications, we use a logic formalism known as temporal logic to encode a preferred sequence of plan execution. As an additional step, users could include constraints on the trajectory by minimizing a cost using stochastic sampling. For more details, see the attached video demonstrating task allocation in a fire-fighting scenario.
Figure 3: Using the multi-agent planning framework, users give high-level specifications that plan trajectories for quadcopters to visit regions of interest (hoops) in the Robotarium.
A optimizing task allocation framework that assigns quadcopters a set of tasks based on user specifications.
Future Directions
As we continue to expand the capabilities of the Robotarium we are looking into how to develop long term autonomy for the Crazyflies. This includes autonomous charging as well as remote access for the lab and other users. We hope to use the Lighthouse system as a method for long term tracking since the Crazyflie will know its position instead of relying on passive tracking from a Vicon system. Our plans also include a lab-based simulator for in house projects related to the Crazyflies as well as updating our system to incorporate Crazyswarm to make control of the Crazyflies easier in implementation. In addition to this, in order to accommodate unknown users, we will have to figure out a control scheme that encourages use from a wide variety of users ranging from novices in quadcopter control to experts. We’ll keep Bitcraze updated on the Robotarium’s progression towards fully autonomous aerial swarms!
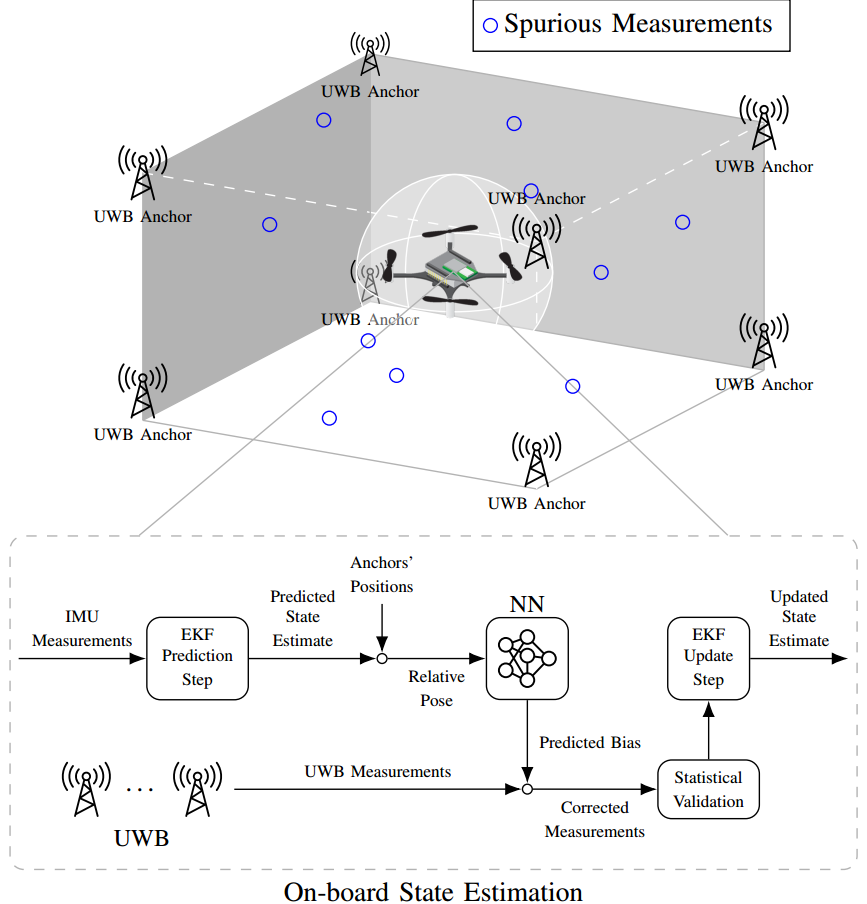
Accurate indoor localization is a crucial enabling technology for many robotic applications, from warehouse management to monitoring tasks. Ultra-wideband (UWB) localization technology, in particular, has been shown to provide robust, high-resolution, and obstacle-penetrating ranging measurements. Nonetheless, UWB measurements are still corrupted by non-line-of-sight (NLOS) communication and spatially-varying biases due to doughnut-shaped antenna radiation pattern. In our recent work, we present a lightweight, two-step measurement correction method to improve the performance of both TWR and TDoA-based UWB localization. We integrate our method into the Extended Kalman Filter (EKF) onboard a Crazyflie and demonstrate a closed-loop position estimation performance with ~20cm root-mean-square (RMS) error.
A stylized depiction of our UWB indoor localization system and the schematics of the proposed estimation framework.
Methodology
UWB measurement errors can be separated into two groups: (1) systematic bias caused by limitations in the UWB antenna pattern and (2) spurious measurements due to NLOS and multi-path propagation. We propose a two-step UWB bias correction approach exploiting machine learning (to address(1)) and statistical testing (to address (2)). The data-driven nature of our approach makes it agnostic to the origin of the measurement errors it corrects.
(1) Neural Network Bias Correction
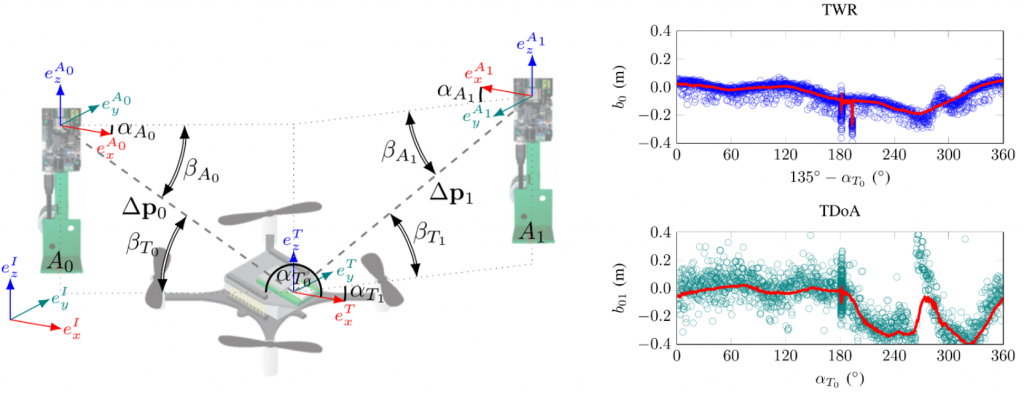
The doughnut-shaped antenna radiation pattern causes the relative poses of anchors and tags to have a noticeable impact on the received signal power, which leads to systematic, predictable biases. To empirically demonstrate the systematic measurement errors resulting from varying the relative pose between anchors and tags, we placed two DWM1000 UWB anchors at a distance of 4m and collected both TWR and TDoA UWB range measurements for the UWB tag mounted on top of a Crazyflie spinning around its own z-axis.
Left: schematics of the ranges (∆p’s), azimuth (α’s) and elevation angles (β’s) defining the relative poses of tag T and anchors A0, A1 when collecting the systematic bias measurements. Right: the neural network’s inferred bias (in red) with respect to the tag’s varying azimuth angle towards anchor T0, αT0, plotted against the UWB raw measurements.
We choose to leverage the nonlinear representation power of neural networks to learn the systematic bias which only depends on anchor-tag relative poses. Considering the limited onboard computation power, we select a fully connected neural network with 50 neurons in each of two layers with ReLU activation. To represent the relative pose between the UWB tag and anchors, we select the relative distance ∆p and roll, pitch, and yaw angles of the quadcopter as the input features x for the network. As we used fixed anchors, we do not include their poses as inputs (this level of generalization is left for future work). Given sufficient training data, the spatially-varying measurement bias can be described by a nonlinear function b=f(x) captured by the trained neural network.
(2) Outlier (Spurious Measurements) Rejection
Besides our learning-based bias correction, we use a quadcopter’s dynamic model to filter inconsistent UWB range measurements. Given the estimated velocity v and maximum acceleration amax, we can compute the maximum distance dmax a quadcopter can cover during time ∆t. Based on this information, we can reject unattainable measurements before fusing them into the EKF by comparing the measurement innovation with dmax.
Moreover, we use a statistical hypothesis test to further classify potential outlier measurements. Since the measurement innovation vector is assumed to be distributed according to a multivariate Gaussian distribution, the normalized sum of squares of its values should follow a Chi-square distribution. We use the Chi-square hypothesis test to determine whether a measurement innovation is likely coming from this distribution.
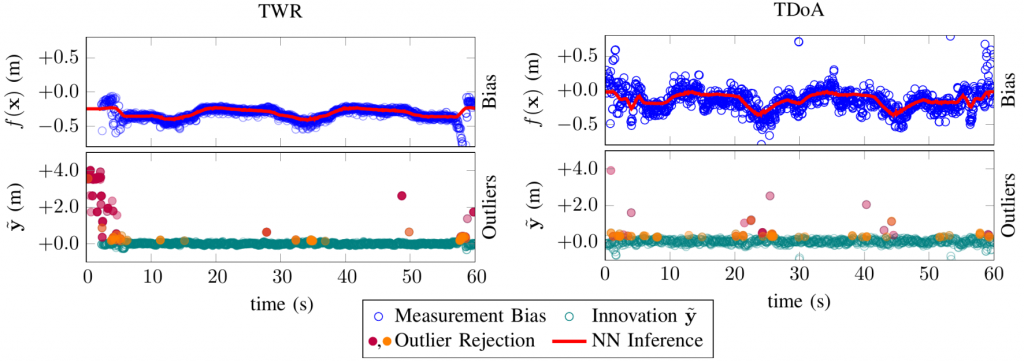
UWB measurement bias f (x) prediction performance of the trained neural network (in red) compared to the actual measurement errors (blue dots) as well as the role of model-based filtering (purple dots) and statistical validation (orange dots) in rejecting outlier measurement innovations (teal dots) during a 60” flight experiment.
Data Collection and Training
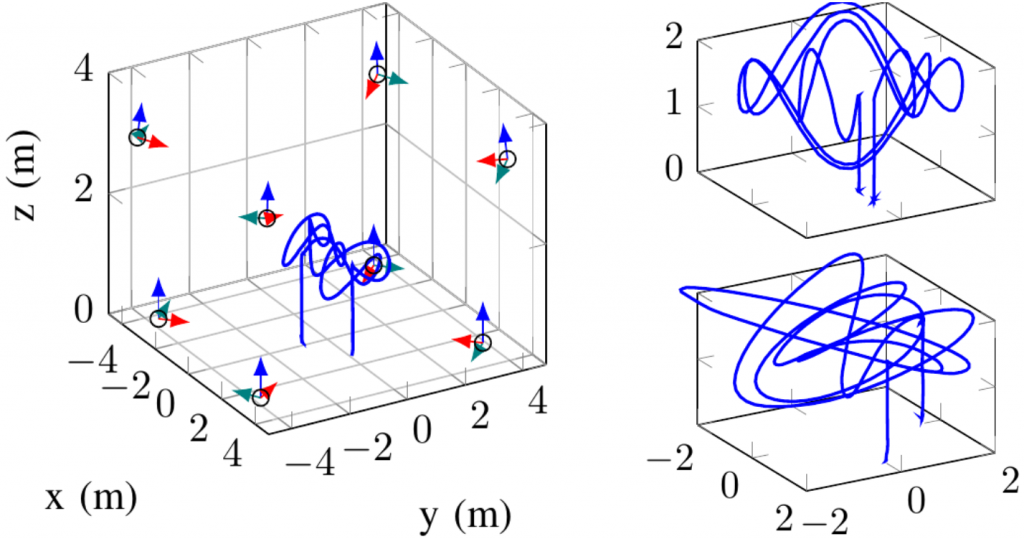
We use a Crazyflie 2.0 quadcopter and the Loco Positioning System (LPS)’s UWB DW1000 modules as our research platforms. Our calibration approach runs on the Crazyflie STM32 microcontroller within the FreeRTOS real-time operating system. We equipped a cuboid flying arena with 8 UWB anchors, one for each vertex. The anchor positions were measured using a Leica total station theodolite.
Left: three-dimensional plot of our flight arena showing the positions and poses of the eight UWB DW1000 anchors (each facing towards its own x-axis, i.e., the red versor). Right: two of the training trajectories we flew to collect the samples that we used to train our neural network-based bias estimator
For all experiments, the ground truth position of the Crazyflie was provided by 10 Vicon cameras. The neural network was trained using PyTorch. To perform inference on the Crazyflie’s microcontroller, we re-use PyTorch’s trained weights in a plain C re-implementation. Since the DW1000 modules in the LPS provide UWB measurements every 5ms, the neural network inference runs at 200Hz during flight as well. Our outlier rejection method is also implemented in plain C and merged with the onboard EKF.
Close-loop Position Estimation Performance
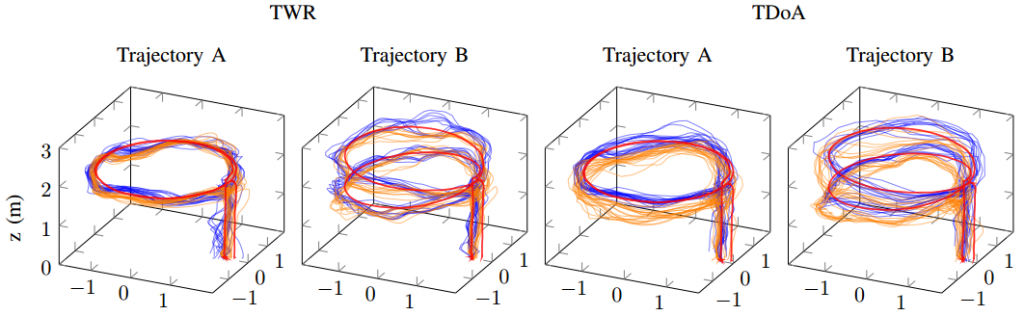
We demonstrate the position estimation and close-loop performance of the proposed methods by flying a Crazyflie quadcopter along planar and non-planar circular trajectories (which were not among the trajectories used for training). A comparison between the estimation error of (A) the UWB localization estimate enhanced with outlier rejections and (B) the estimated enhanced with both outlier rejection and neural network bias compensation is conducted in our experiments for both TWR and TDoA2 modes. We repeated all of our experiments 10 times with a target velocity of 0.375m/s. The quadcopter trajectories during these flight tests are displayed in the following plots.
Flight paths and the tracking performance of our approach with (in blue) and without (in orange) the neural network bias correction for two reference trajectories (planar and non-planar circular orbits) and both UWB modes (TWR and TDoA).
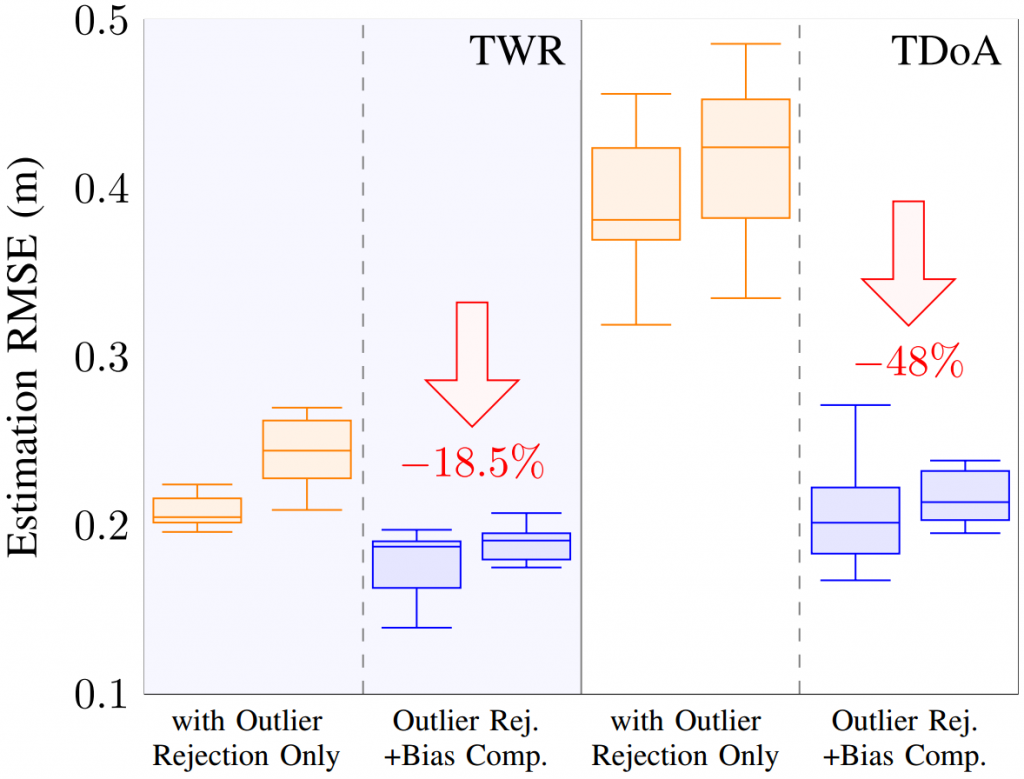
The distributions of the RMS estimation errors are summarized into a box plot. TWR-based ranging results in better localization performance than TDoA. However, we observe that, with our neural network bias compensation, the average RMS error of TDoA localization is around 0.21m, which is comparable to that of TWR-based localization (~0.19m). Thanks to the neural network bias compensation, the average reduction in the RMS error is ~18.5% and 48% for TWR and TDoA, respectively. Most notably, this result suggests that bias compensation might help closing the performance gap between TWR- and TDoA-based localization.
Root mean square error (RMSE) of the quadcopter position estimate before (in orange) and after (in blue) the neural network calibration step for both TWR and TDoA ranging modes. Each pair of box plots refers to a planar reference trajectory (left of each pair) and a reference trajectory with varying z (right of each pair), showing a greater performance enhancement for the latter.
Outlook
In this work, we presented a two-step methodology to improve UWB localization—for both TWR- and TDoA-based measurements. We used a lightweight neural network to model and compensate for pose-dependent and spatially-varying biases and an outlier rejection mechanism to filter spurious measurements. Through several real world flight experiments tracking different trajectories, we showed that we are able to improve localization accuracy for both TWR and TDoA, granting safer indoor flight. In our future work, we will include the anchors’ pose information to allow our method to further generalize to previously unobserved indoor environments, with different anchor configurations.
Feel free to contact us if you have any questions or ideas: wenda.zhao@robotics.utias.utoronto.ca. Please cite this as:
<code>@article{wenda2020learning,
title={Learning-based Bias Correction for Ultra-wideband Localization of Resource-constrained Mobile Robots},
author={Wenda Zhao and Abhishek Goudar and Jacopo Panerati and Angela P. Schoellig},
journal={arXiv preprint arXiv:2003.09371},
year={2020}
}</code>
This week we have a guest blog post from Joseph La Delfa.
DroneChi is a Human Drone interaction experience that uses the Qualisys motion capture system that enables the Crazyflie to react to movements of your body. At the Exertion Games Lab in Melbourne Australia, we like to design new experiences with technology where the whole body can be the controller and is involved in the experience.
When we first put these two technologies together we realised two things.
It was super easy to keep your attention on a the drone as it flew around the room reacting to your movements.
As a result it was also really easy to reflect on and refine ones own movements.
We thought this was like meditation meditated by a drone, and wanted to investigate how to further enhance this experience through design. We thought the smooth movements were especially mesmerising and so I decided to take beginner Tai Chi lessons; to get an appreciation of what it felt like to move like a Tai Chi student.
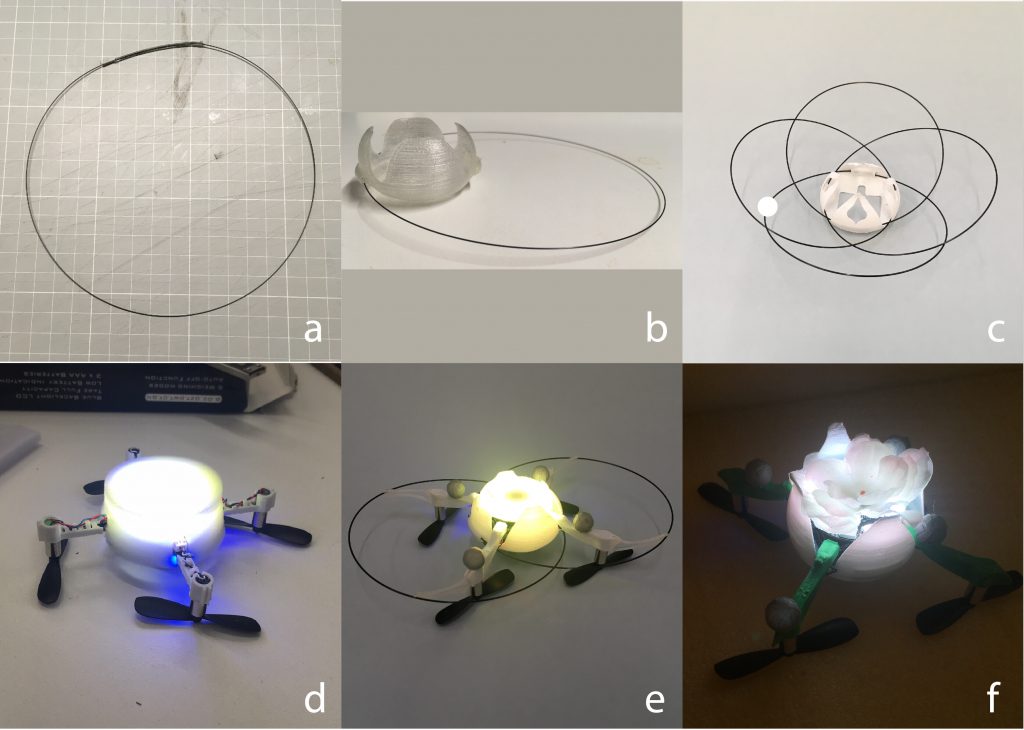
We undertook an 8 month design program where we simultaneously designed the form and the interaction of the Crazyflie. The initial design brief was pretty simple, make it look and feel light, graceful and from nature. In Tai Chi you are asked all the time to imagine a flower, the sea or a bird as you embody its movements, we wanted to emulate these experiences but without verbal instruction. Could a drone facilitate these sorts of experiences through it’s design?
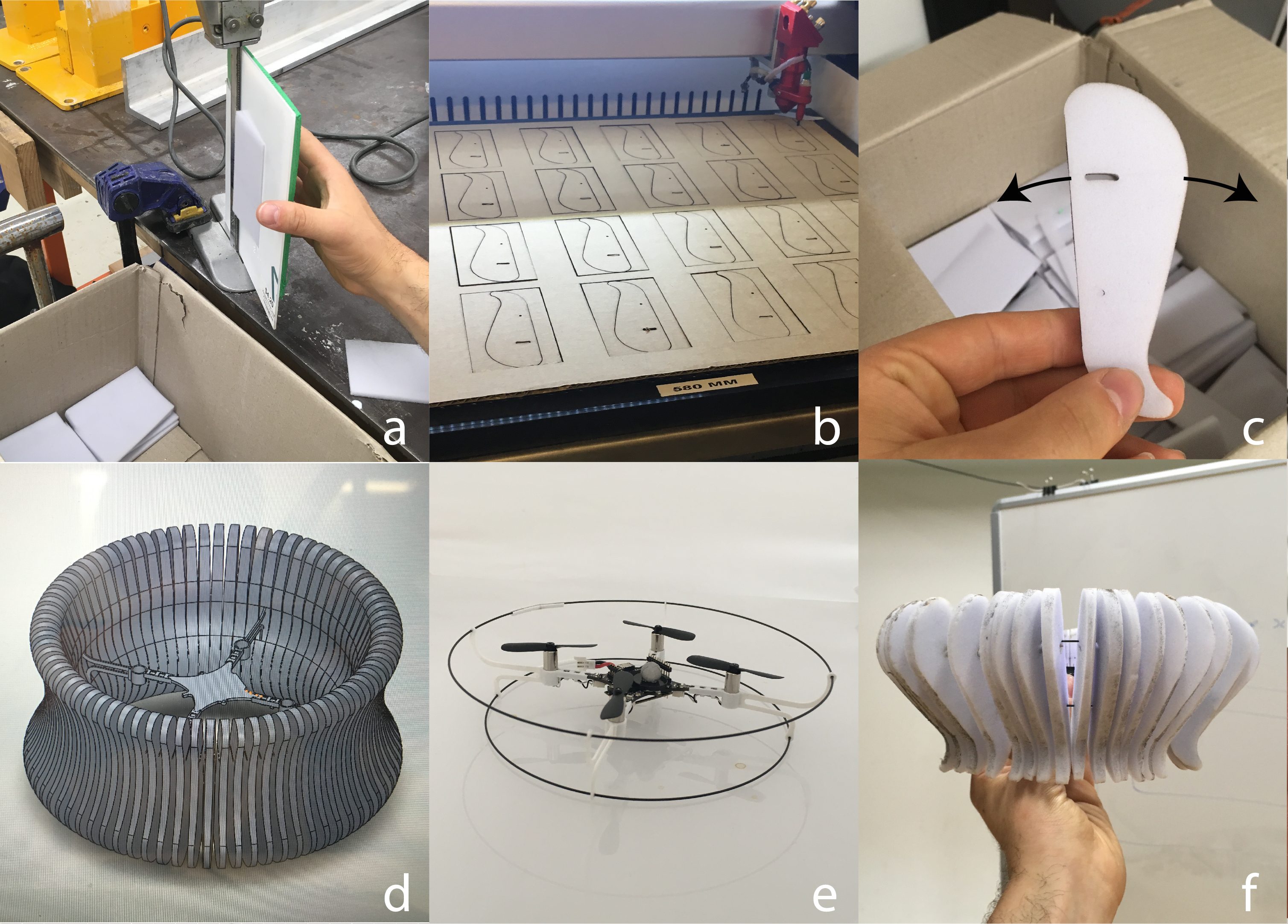
We will present a summarised version of how the form and the interaction came about. Starting with a mood board, we collated radially symmetrical forms from nature to match a drone’s natural weight distribution.
We initially went with a jelly fish, hoping to emulate their “push gliiide” movement by articulating laser cut silhouettes (see fig c). This proved incredibly difficult, after searching high and low for a foam that was light enough for the Crazyflie to lift, we just could not get it to fly stable.
However, we serendipitously fell into the flower shape by trying to improve how we joined the carbon rods together in a loop (fig b below). By joining them to the main hull we realised it looked like a petal! This set us down the path of the flower, we even flipped the chassis so that the LED ring faced upwards (cheers to Tobias for that firmware hack).
Whilst this was going on we were experimenting with how to actually interact with the drone. Considering the experience was to be demonstrated at a major conference we decided to keep the tracking only to the hands, this allowed quick change overs. We started with cardboard pads, experimented with gloves but settled on some floral inspired 3D printed pads. We were so tempted to include the articulation of the fingers but decided against it to avoid scope creep! Further to this, we curved the final hand pads (fig d) to promote the idea of holding the drone, inspired by a move in Tai Chi called “holding the ball”.
As a beginner practicing Tai Chi I was sometimes overwhelmed by the number of aspects of my movement that constantly needed monitoring, palms out, heel out, elbow slightly bent, step forward etc. However in brief moments it all came together and I was able to appreciate the feelings of these movements as opposed to consciously monitoring them. We wanted this kind of experience when learning DroneChi so we devised a way of mapping the drone to the body to emulate this. After a few iterations we settled on the “mid point” method as seen below.
The drone only followed the midpoint (blue dot above) if it was within .2m of it. If it was outside of this range it would float away slowly from the participant. This may seem like a lot, but with little in the way of visual guidance (eg a laser pointer or an augmented display) a person can only rely on the proprioceptive feedback from their own body. We used the on board LED ring on the drone to let the person know at least when they are close, but that is all the help they got. As a result this takes a lot of concentration to get right!
In the end we were super happy with the final experience, in the study participants reported tuning into their bodies when using the drone, as well as experiencing a unique sort of relationship to the drone; not entirely like a pet and also like an extension of the body. We will be investigating both findings from the study through the design and testing of a new system on the Crazyflie. We see this work contributing to more intimate designs for human drone interactions as well as a being applicable to health contexts such as rehabilitation.
CrazyFlies are great for indoor applications, thanks to their maneuverability and ubiquitous character. Its small size, however, limits sensor quality and compute capability. In our recent work we present source seeking onboard a CrazyFlie by deep reinforcement learning. We show a general methodology for deploying deep neural networks on heavily constrained nano drones, using full 8-bit quantization and input scaling.
Our fully autonomous light-seeking CrazyFlie
Problem definition
Source seeking can be interesting in a variety of contexts. We focus on light seeking, as seen in nature. Many insects rely on light, either for survival or navigation. Light seeking in aerial robotics has many applications, such as finding the exit out of a dark room.
Our goal is to fully autonomously find a light source, using only the onboard Micro Controller Unit (MCU) and deep reinforcement learning.
Crazyflie configuration
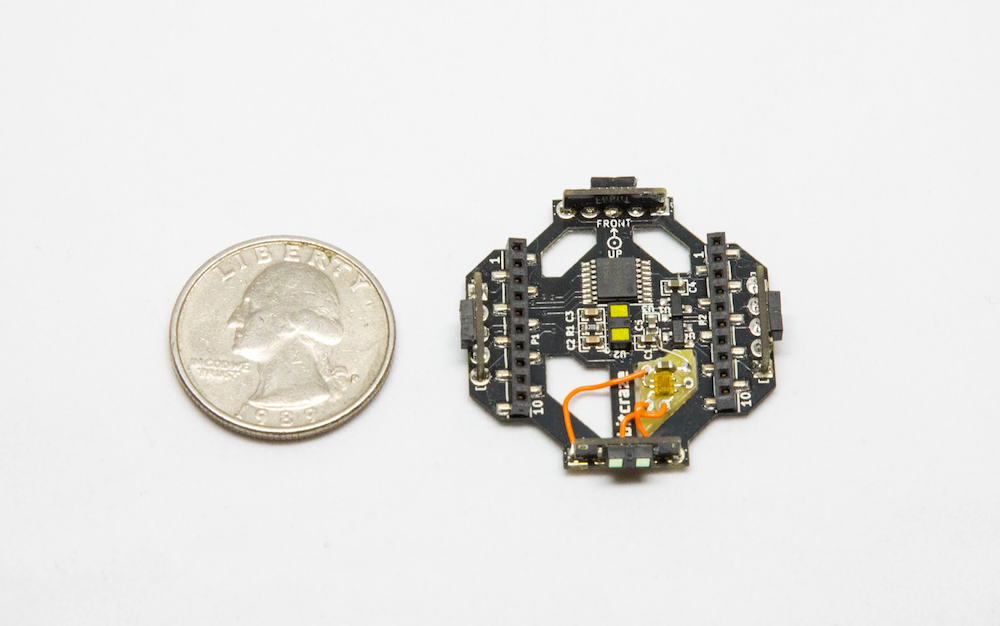
Our fully autonomous nano drone uses several standard and custom sensors. We use the multiranger and flowdeck for position control and obstacle avoidance.
The Multiranger deck with our custom light sensor
We add a custom light sensor, based on the Adafruit TSL2591 sensor. The custom light sensor nicely fits in the multiranger deck, adding little mass and inertia (total vehicle mass is 33 grams).
CrazyFlie 2.1 with multiranger, flowdeck and light sensor
Algorithm
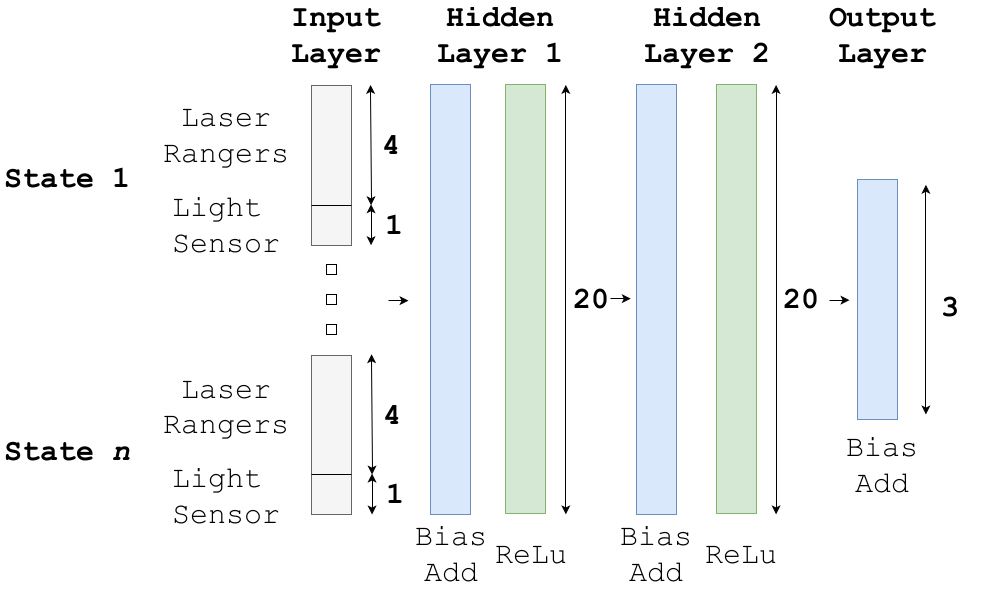
We use a deep reinforcement learning algorithm with a discrete action space. The neural network policy has laser rangers and light readings (current and past values) as input. The neural network tells the drone to rotate left, right or fly forward. We train a neural network with 2 hidden layers of both 20 nodes, featuring bias add and relu activation functions. The input layer is a vector with a length of 20 (4 states), which, compared to images, greatly reduces computational effort.
DQN policy architecture
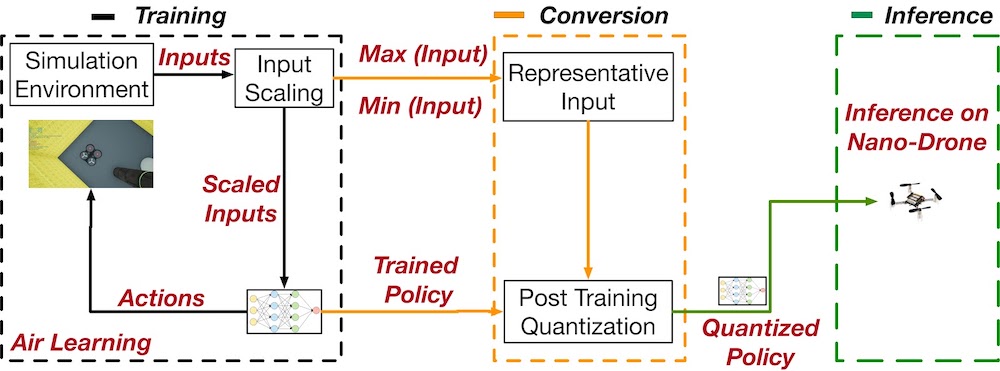
Simulation and conversion
We train our agent in simulation using the Air Learning simulation platform, after which we fully quantize the neural network to 8-bit integers.
To maintain accuracy after quantization, we have come up with quantization innovations. Both input layer and all tensors in the network need to have a pre-defined [min,max] range in float32, to convert to 8-bit integers.
Air Learning pipeline
In the input layer, not all inputs have the same range. That is, a laser ranger can have values from 0 to 5 meters while our light sensor may return a value between 0 and 300 lux. To avoid this issue, we scale all inputs to the same range.
Additionally, the tensors in the network need to have an assigned [min,max] range for quantization. To achieve this, we input a range of representative input into the unquantized model, and read out the values of intermediate layers. With this strategy, we arrive at a 2.9x speed-up compared to float32 inference.
Implementation
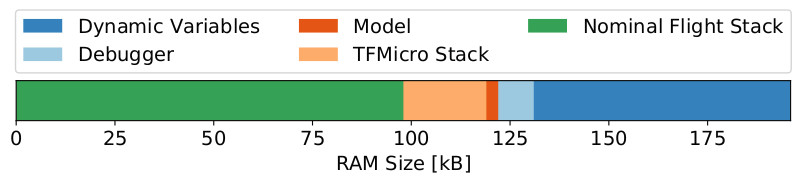
We use Tensorflow Lite to deploy our tensorflow models in C on the CrazyFlie. The TFMicro Stack, together with the actual model, almost completely fill up the available RAM.
RAM utilization on the CrazyFlie 2.1
The total amount of RAM available on the CrazyFlie 2.1 is 196kB, of which only 131kB is available for static allocation at compile time. The Bitcraze software stack uses 98kB of RAM, leaving only 33kB available for our purposes. The TFMicro stack takes up 24kB, thus leaving 9kB for the actual model (e.g., weights, bias terms).
We also analyzed CPU usage, and noticed a high amount of interrupts by the ‘stabilizer’ thread, i.e., the PID controllers. Because of these interrupts, inference of our model takes 46.4 times longer than it would have been without interruption.
Our quantized model is 3kB. If it were an FP32 model, it would have taken 12kB, which would not have fitted in the available memory. We were able to run inference at 4Hz, compared to the estimated 1.4Hz of the same but unquantized model.
In a practical sense, we noticed a decreased level of stability when increasing model size. Occasionally the drone would reboot randomly while flying. Possible causes for this behavior are RAM overflow and task scheduling problems in RTOS. Besides, we observed variation in performance loss after quantization. Some of our trained models would just keep rotating after quantization, while our final model demonstrates robust source seeking behavior. This degree of uncertainty can possibly be avoided using quantization aware training.
Finally, flying in a dark room without a position estimate can be challenging. The PID controllers heavily rely on information provided by the Flow Deck. This information is limited when little light is present while flying over a floor containing little features. To fix this, we added mats with texture on the ground, adding features and enabling stable flight in a dark room.
Flight tests
To validate our results in simulation, we created a cluttered environment with a light source. We randomly initialized the drone in the room, and hereby observed a success rate of 80% in a total of 105 flight tests. By varying the environment and initial drone position, we learned more about the inner workings of our algorithm.
Experiment testing environment
We learned that the algorithm performs better with more obstacles, and that a closer initial position improves performance. Generally, source seeking far away from the source seems really hard. Almost no variation in source strength exists between different measurements, and the drone observes mostly noise.
Outlook
With our methodology, we were able to perform fully autonomous source seeking using deep reinforcement learning on a Cortex-M4 MCU. We hope our methodology will be applicable to other TinyML applications where resources are heavily constrained. Developing custom accelerators for a specific workload is time-consuming and expensive, while general purpose MCU’s are cheap and widely available. With our methodology, we unlock new applications for learning algorithms on heavily constrained platforms.
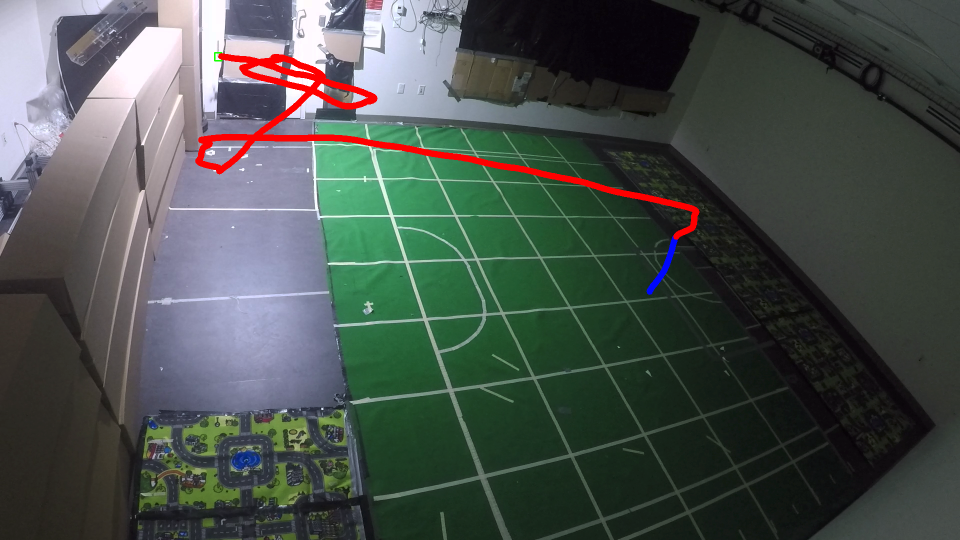
Direct path to source in empty room, blue = take-off
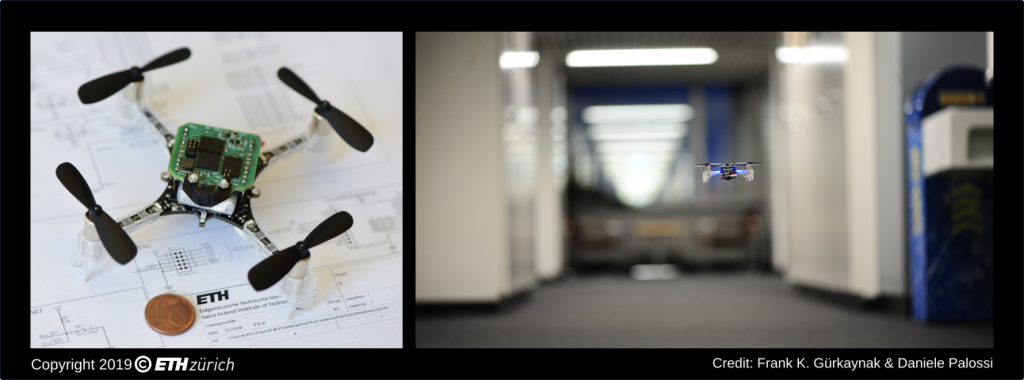
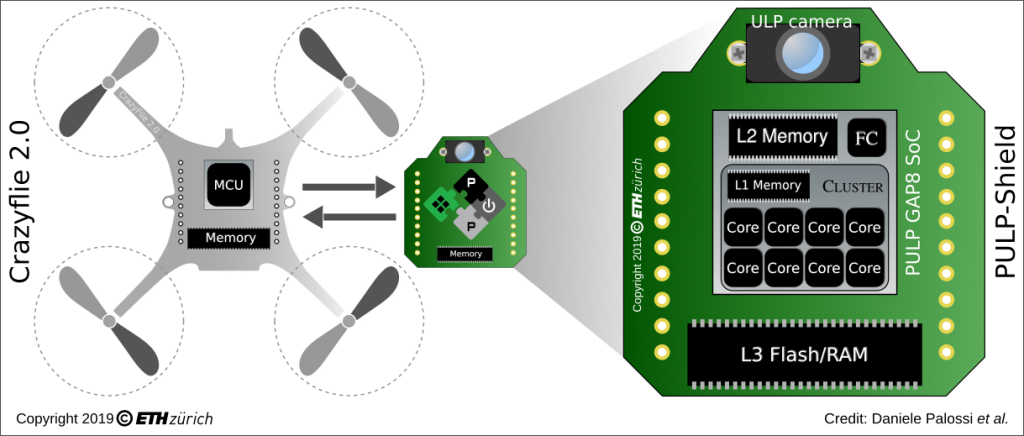
Hi everyone, here at the Integrated and System Laboratory of the ETH Zürich, we have been working on an exciting project: PULP-DroNet. Our vision is to enable artificial intelligence-based autonomous navigation on small size flying robots, like the Crazyflie 2.0 (CF) nano-drone. In this post, we will give you the basic ideas to make the CF able to fly fully autonomously, relying only on onboard computational resources, that means no human operator, no ad-hoc external signals, and no remote base-station! Our prototype can follow a street or a corridor and at the same time avoid collisions with unexpected obstacles even when flying at high speed.
PULP-DroNet is based on the Parallel Ultra Low Power (PULP) project envisioned by the ETH Zürich and the University of Bologna. In the PULP project, we aim to develop an open-source, scalable hardware and software platform to enable energy-efficient complex computation where the available power envelope is of only a few milliwatts, such as advanced Internet-of-Things nodes, smart sensors — and of course, nano-UAVs. In particular, we address the computational demands of applications that require flexible and advanced processing of data streams generated by sensors such as cameras, which is beyond the capabilities of typical microcontrollers. The PULP project has its roots on the RISC-V instruction set architecture, an innovative academic and research open-source architecture alternative to ARM.
The first step to make the CF autonomous was the design and development of what we called the PULP-Shield, a small form factor pluggable deck for the CF, featuring two off-chip memories (Flash and RAM), a QVGA ultra-low-power grey-scale camera and the PULP GAP8 System-on-Chip (SoC). The GAP8, produced by GreenWaves Technologies, is the first commercially available embodiment of our PULP vision. This SoC features nine general purpose RISC-V-based cores organised in an on-chip microcontroller (1 core, called Fabric Ctrl) and a cluster accelerator of 8 cores, with 64 kB of local L1 memory accessible at high bandwidth from the cluster cores. The SoC also hosts 512kB of L2 memory.
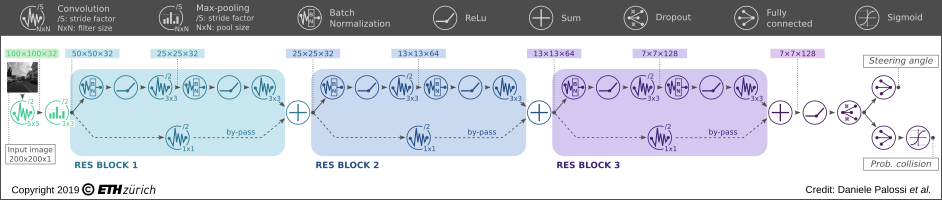
Then, we selected as the algorithmic heart of our autonomous navigation engine an advanced artificial intelligence algorithm based on DroNet, a Convolutional Neural Network (CNN) that was originally developed by our friends at the Robotic and Perception Group (RPG) of the University of Zürich. To enable the execution of DroNet on our resource-constrained system, we developed a complete methodology to map computationally-intense deep neural networks on the PULP-Shield and the GAP8 SoC. The network outputs two pieces of information, a probability of collision and a steering angle that are translated in dynamic information used to control the drone: respectively, forward velocity and angular yaw rate. The layout of the network is the following:
Therefore, our mission was to deploy all the required computation onboard our PULP-Shield mounted on the CF, enabling fully autonomous navigation. To put the problem into perspective, in the original work by the RPG, the DroNet CNN enabled autonomous navigation of big-size drones (e.g., the Bebop Parrot). In the original use case, the computational power and memory was not a problem thanks to the streaming of images to a remote base-station, typically a laptop consuming 30-100 Watt or more. So our mission required running a similar workload within 1/1000 of the original power. To make this work, we combined fixed-point arithmetic (instead of “traditional” floating point), some minimal modification to the original topology, and optimised memory and computation usage. This allowed us to squeeze DroNet in the ultra-small power budget available onboard. Our most energy-efficient configuration delivers 6 frames-per-second (fps) within only 64 mW (including all the electronics on the PULP-Shield), and when we push the PULP platform to its limit, we achieve an impressive 18 fps within just 3.5% of the total CF’s power envelope — the original DroNet was running at 20 fps on an Intel i7.
Do you want to check for yourself? All our hardware and software designs, including our code, schematics, datasets, and trained networks have been released and made available for everyone as open source and open hardware on Github. We look forward to other enthusiasts contributions both in hardware enhancement, as well as software (e.g., smarter networks) to create a great community of people interested in working together on smart nano-drones. Last but not least, the piece of information you all were waiting. Yes, soon Bitcraze will allow you to enjoy of our PULP-shield, actually, even better, you will play with its evolution! Stay tuned as more information about the “code-name” AI-deck will be released in upcoming posts :-).
This week we have a guest blog post from Javier Burgués. Enjoy!
I would like to introduce you a rather unknown application of the CrazyFlie 2.0 (CF2): chemical sensing. Due to its small form-factor, the CF2 is an ideal platform for carrying out gas sensing missions in hazardous environments inaccessible to terrestrial robots and bigger drones. For example, searching for victims and hazardous gas leaks inside pockets that form within the wreckage of collapsed buildings in the aftermath of an earthquake or explosion.
To evaluate the suitability of the CF2 for these tasks, I developed a custom deck, named the MOX deck, to interface two metal oxide semiconductor (MOX) gas sensors to the CF2. Then, I performed experiments in a large indoor environment (160 m2) with a gas source placed in challenging positions for the drone, for example hidden in the ceiling of the room or inside a power outlet box. From the measurements collected in motion (i.e. without stopping) along a predefined 3D sweeping path that takes around 3 minutes, the CF2 builds a map of the gas distribution and identifies the most likely source location with high accuracy.
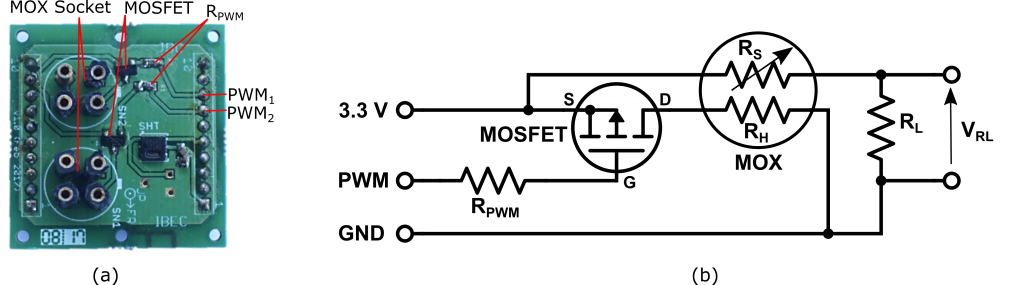
1. MOX deck
The MOX deck (Fig. 1a) contains two sockets for 4-pin Taguchi-type (TGS) gas sensors, a temperature/humidity sensor (SHT25, Sensirion AG), a dual-channel digital potentiometer (AD5242BRUZ1M, Analog Devices, and two MOSFET p-type transistors (NX2301P, NEXPERIA). I used TGS 8100 sensors (Figaro Engineering) due to its compatibility with 3.0 V logic, power consumption of only 15 mW (the lowest in the market as of June 2016) and miniaturized form factor (MEMS). Since the sensor heater uses 1.8V, two transistors (one per sensor) reduce the applied power by means of pulse width modulation (PWM). The MOX read-out circuit (Fig. 1b) is a voltage divider connected to the μC’s analog-to-digital converter (ADC). The voltage divider is powered at 3.0 V and the load resistor (RL) can be set dynamically by the potentiometer (from 60 Ω to 1 MΩ in steps of 3.9 kΩ). Dynamic configuration of the load resistor is important in MOX gas sensors due to the large dynamic range of the sensor resistance (several orders of magnitude) when exposed to different gas concentrations. The sensors were calibrated (by exposing them to several known concentrations) to convert the raw output into parts-per-million (ppm) concentration units.
Figure 1. (a) MOX deck (without gas sensors); (b) Schematic of the conditioning electronics for each MOX sensor.
The initialization task of the deck driver configures the PWM, initializes the SHT25 sensor, sets the wiper position of both channels of the potentiometer and adds the MOX readout registers to the list of variables that are continuously logged and transmitted to the base station. The main task of the deck driver reads the MOX sensor output voltage and the temperature/humidity values from the SHT25 and sends them to the ground station at 10 Hz.
2. Experimental Arena, External Localization System and Gas Source
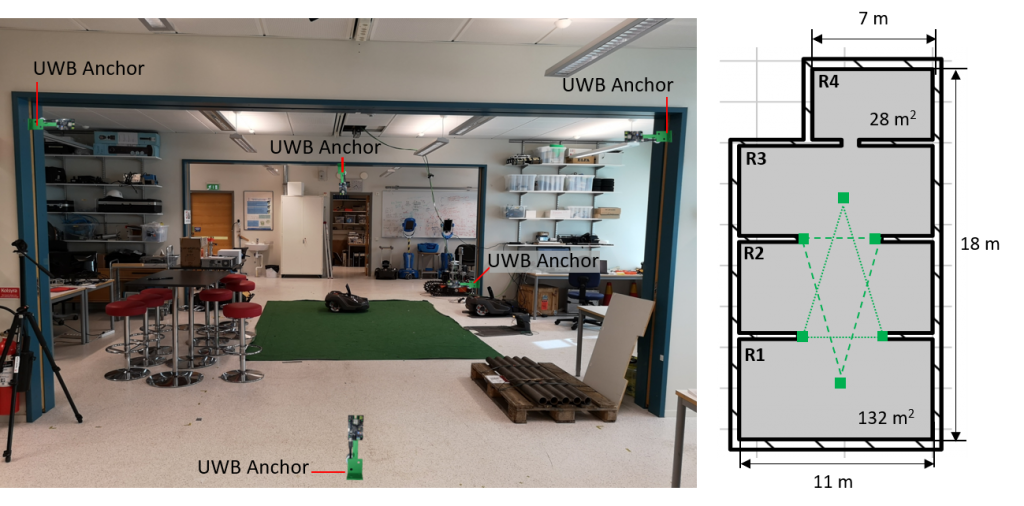
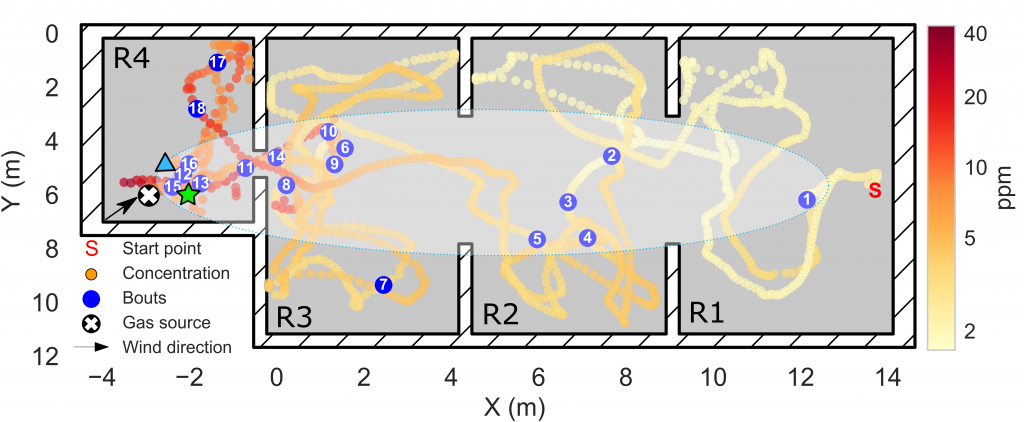
Experiments were performed in a large robotics laboratory (160 m2 × 2.7 m height) at Örebro University (Sweden). The laboratory is divided into three connected areas (R1–R3) of 132 m2 and a contiguous room (R4) of 28 m2 (Fig. 2). To obtain the 3D position of the drone, I used the Loco positioning system (LPS) from Bitcraze, based on ultra-wide band (UWB) radio transmitters. Six LPS anchors were positioned in known locations of the experimental arena and one LPS tag was fixed to the drone. The six LPS anchors were placed in the central area of the laboratory, shaped in two inverted triangles (below and above the flight area).
Figure 2. Experimental arena. The green squares indicate the position of the UWB anchors, which are positioned along two inverted triangles (green lines).
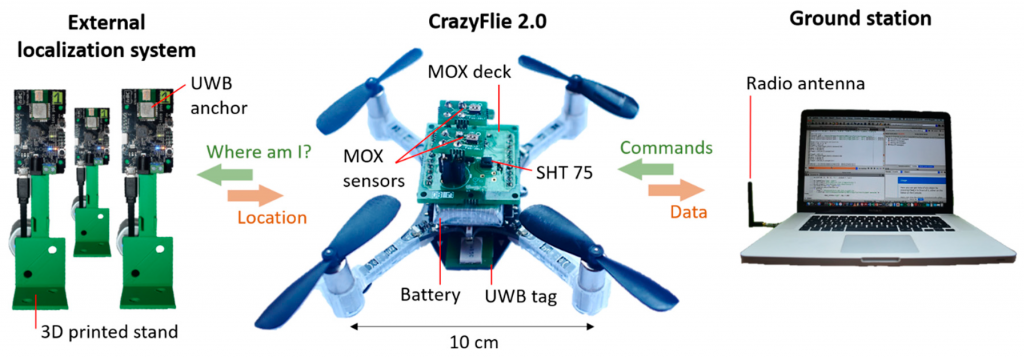
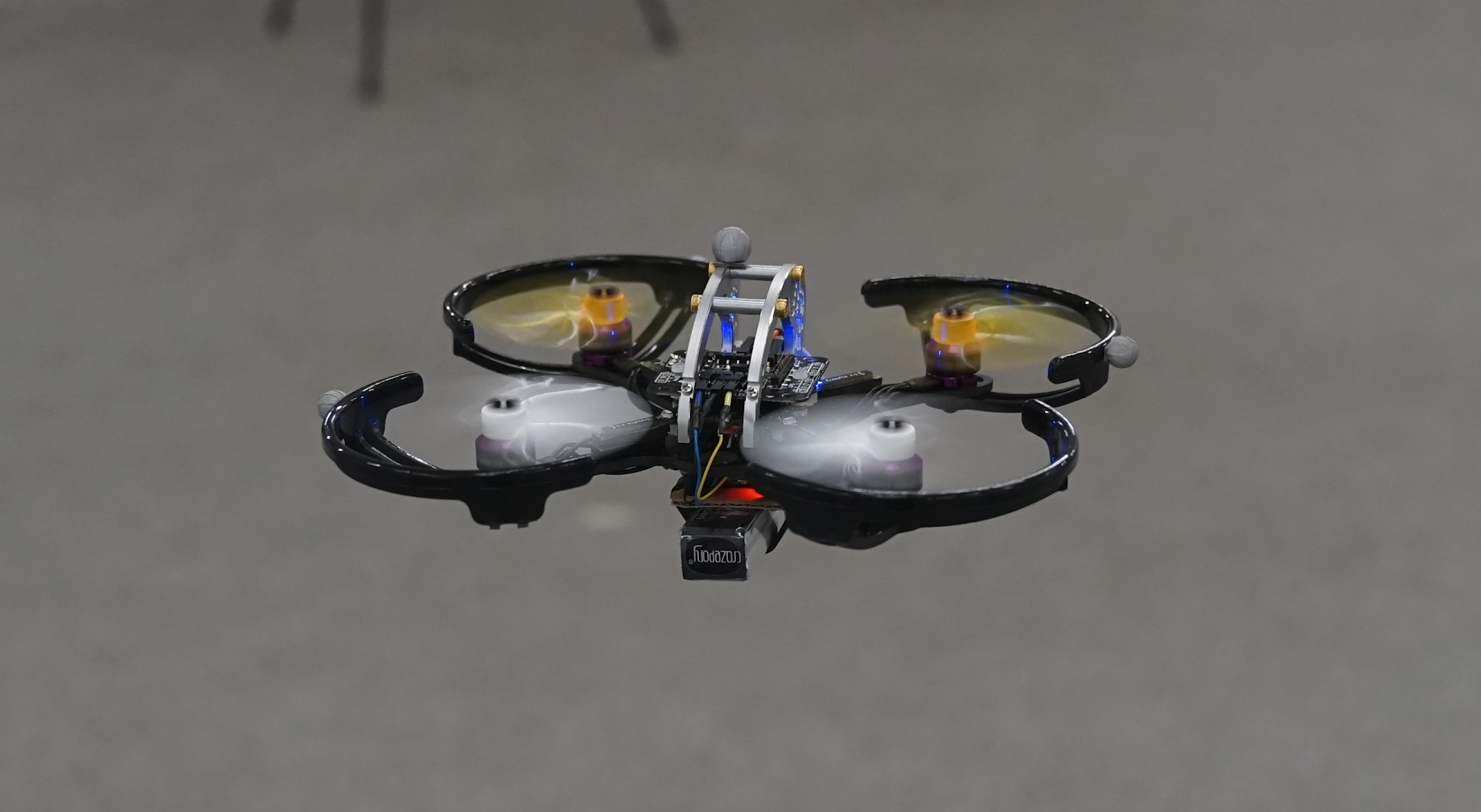
Figure 3. The CrazyFlie 2.0 equipped with the MOX deck and the UWB tag (center) gets its 3D position from the LPS system (left). The location and sensor data are communicated to the ground station (right) over the 2.4 GHz ISM band.
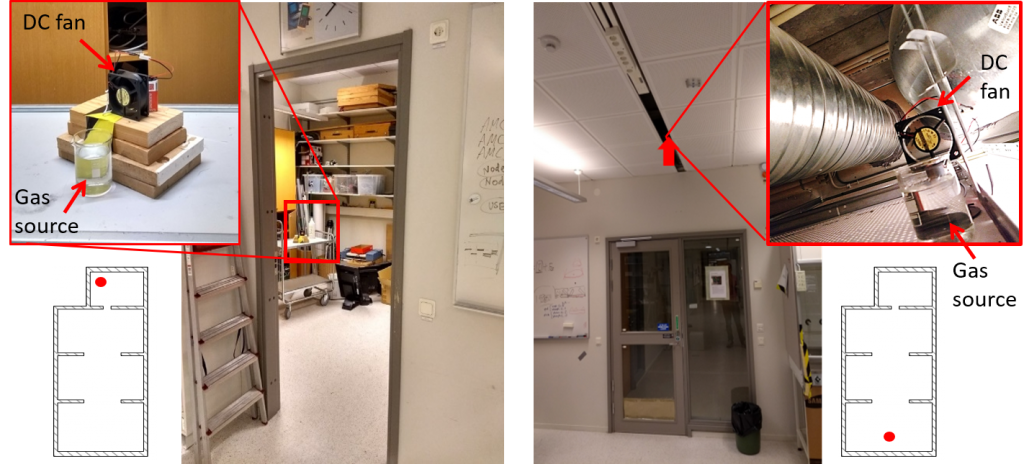
A gas leak was emulated by placing a small beaker filled with 200 mL of ethanol 96% in different locations of the arena (Fig. 4). Ethanol was used because it is non-toxic and easily detectable by MOX sensors. Two experiments were carried out to check the viability of the proposed system for gas source localization and mapping in complex environments. In the first experiment, the gas source was placed on top of a table (height = 1 m) in the small room (R4). In the second experiment, the source was placed inside the suspended ceiling (height = 2.7 m) near the entrance to the lab (R1). Since the piping system of the lab runs through the suspended ceiling, the gas source could represent a leak in one of the pipes. A 12 V DC fan (Model: AD0612HB-A70GL, ADDA Corp., Taiwan) was placed behind the beaker to facilitate dispersion of the chemicals in the environment, creating a plume. The experiments started five minutes after setting up the source and turning on the DC fan.
Figure 4. Gas source location in two experiments. (left) Experiment 1: inside small room; (right) Experiment 2: hidden in suspended ceiling.
3. Navigation strategy
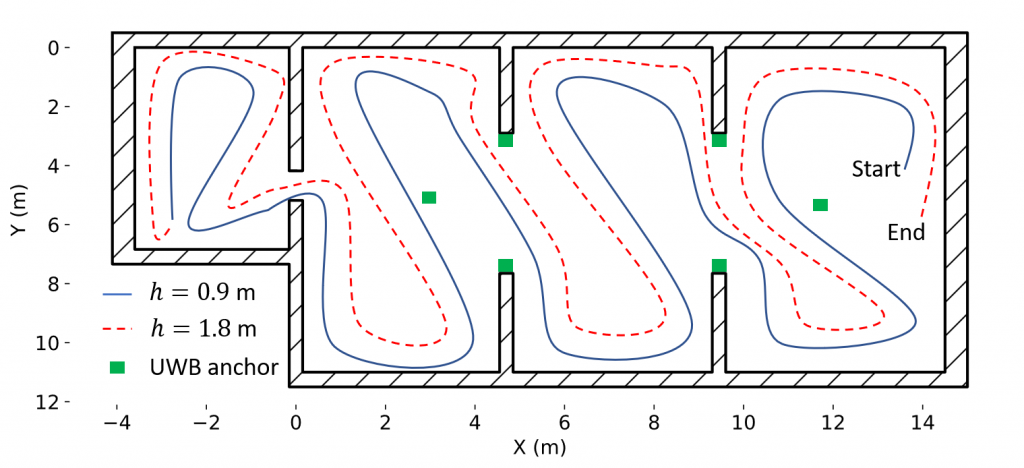
The drone was sent to fly along a predefined sweeping path consisting of two 2D rectangular sweepings at different heights (0.9 m and 1.8 m), collecting measurements in motion (Fig. 5). These two heights divide the vertical space of the lab in three parts of equal size. Flying first at a lower altitude minimizes the impact of the propellers’ downwash in the gas distribution. For safety reasons, the trajectory was designed to ensure enough clearance around obstacles and walls, and people working inside the laboratory were told to remain in their seats during the experiments. The ground station communicates the flight path to the drone as a sequence of (x,y,z) waypoints, with a target flight speed of 1.0 m/s. The CF2 reports the measured concentration and its location to the ground station every 100 ms.
Figure 5. Predefined navigation strategy based on zig-zag sweeping at two heights (0.9 and 1.8 m).
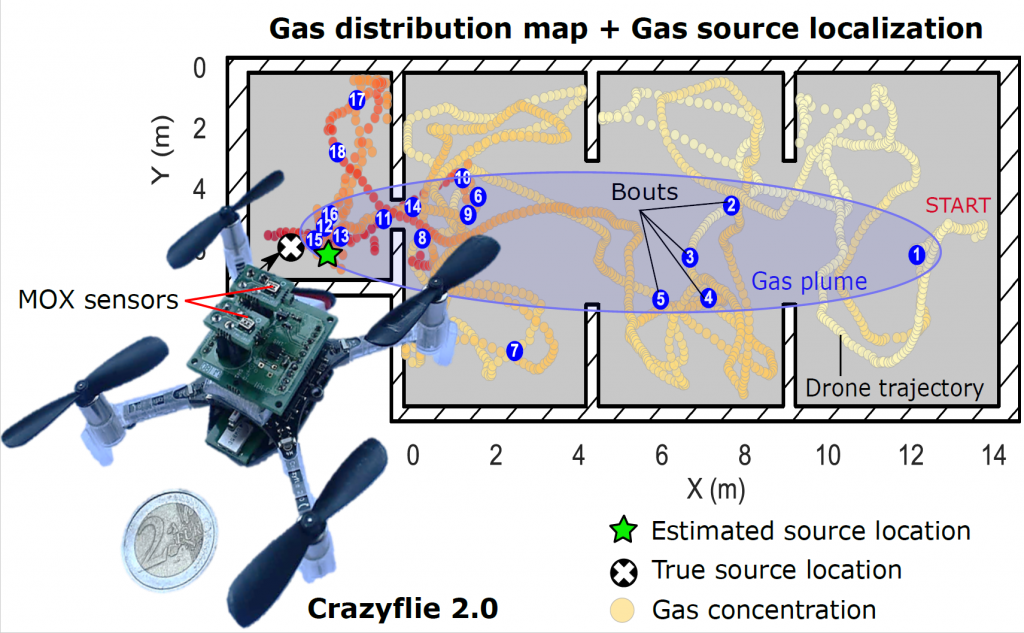
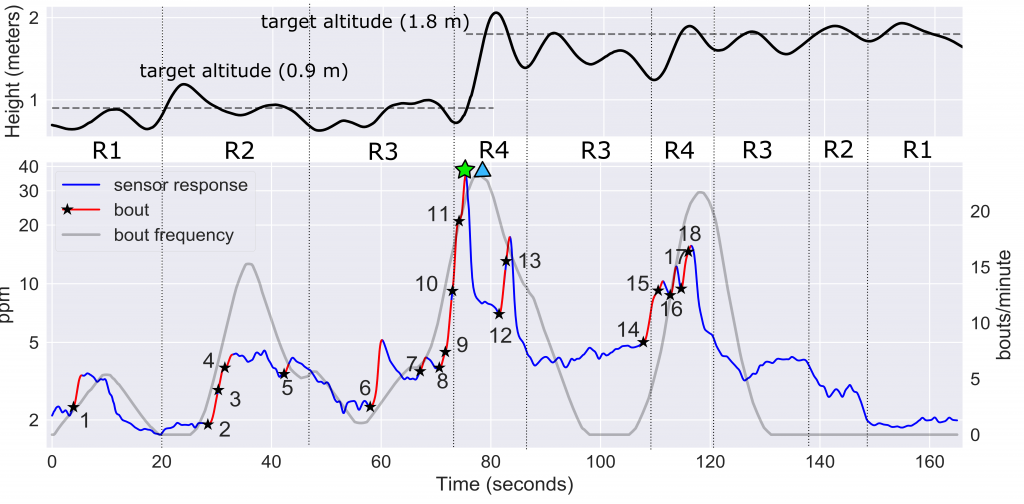
At the end of the exploration, the ground station uses all the received information to compute a 3D map of the instantaneous concentration and the ’bouts’. A ’bout’ is declared when the derivative of the sensor response exceeds a certain threshold. Bouts are produced by contact with individual gas patches and some authors use them instead of the instantaneous response (which is more affected by the slow response time of chemical sensors). For gas source localization, we compare two approaches: using the cell with maximum value in the concentration map or using the cell with maximum bout frequency. The bout frequency (bouts/min) is computed as the bout count in a 5 second sliding window multiplied by 12 (to convert it to bouts/min).
4. Results
In the first experiment, the drone took off near the entrance of the lab (R1), 17 meters downwind of a gas source located in the other end of the laboratory (R4). From the gas distribution map (Fig. 6a) it is evident that the gas source must be in R4, because the maximum concentration (35 ppm) was found there while concentrations below 5 ppm were measured in the rest of the lab. The gas plume can be outlined from the location of odor hits. The highest odor hit density (25 hits/min) was found also in R4. The cells corresponding to the maximum concentration (green start) and maximum odor hit frequency (blue triangle) were found at 0.94 and 1.16 m of the true source location, respectively.
Figure 6a. 2D map of the instantaneous concentration (ppm) measured in Experiment 1 (in log scale). The odor hits are represented by blue circles. A hand-drawn ellipse outlines the approximate plume shape based on the location of odor hits.
Figure 6b. (top) Trajectory of the CF2 along the z-axis. (bottom) Temporal evolution of the measured concentration (ppm) on a log scale, with odor hits highlighted in red (the black star indicates the start of an odor hit). The identifiers R1–R4 indicate the area of the map in which the drone is flying at each moment. The maximum instantaneous concentration and the maximum odor hit frequency are indicated by a green star and a blue triangle, respectively.
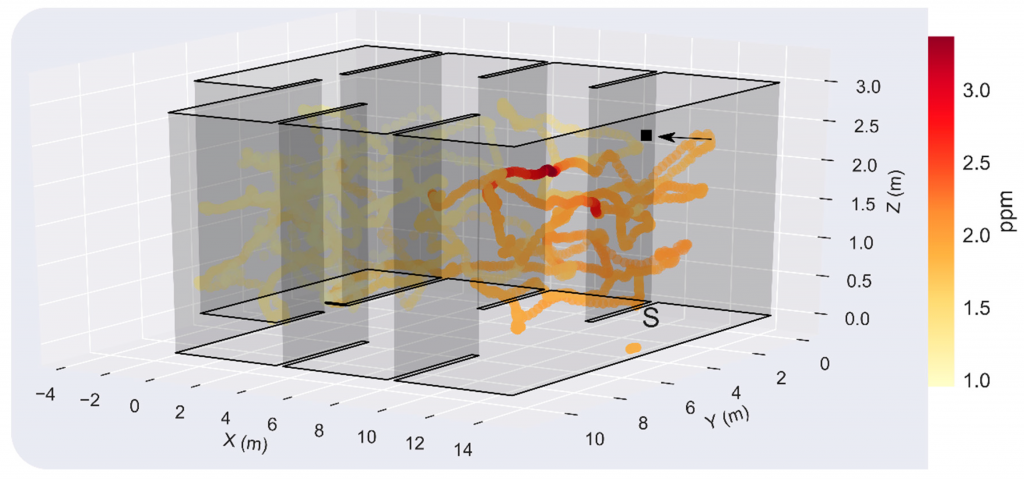
In the second experiment, the gas source was located just above the starting point of the exploration, hidden in the suspended ceiling (Fig. 7). The resulting maximum concentration in the test room was measured when the drone flew at h=1.8 m, highlighting the importance of sampling in 3D for localization and mapping of elevated gas sources. However, since the source is presumably not directly exposed to the environment, concentrations below 3 ppm were found in most locations of the room, which complicates the gas source localization task. The concentration and odor hit maps suggest that the gas source is located in the division between R1 and R2, which represents a localization error of 4.0 and 3.31 m, respectively.
Figure 7. 3D map of the instantaneous concentration (ppm) in Experiment 2. The black square indicates the gas source location (x,y,z) = (14.0, 5.2, 2.7) m, the black arrow the wind direction (positive x-axis) and the letter ‘S’ the starting point of the drone (x,y,z) = (13.5, 5.2, 0.0) m.
5. Conclusions
These results suggest that the CF2 can be used for gas source localization and mapping in large indoor environments. In contrast to previous works in which long measurement times were taken at predefined or adaptively chosen sampling locations, a rough approximation of such maps can be obtained in very short time with concentration measurements acquired in motion. The obtained gas distribution maps seem coherent with respect to the true source location and wind direction, and not only enable the detection of the source with relatively small localization errors but also provide a rich visual interpretation of the gas distribution.
If you are interested in more details about this work, take a look at the journal paper or drop me an email at <jburgues8 at gmail dot com> or leave a comment on the blog!
Here at the USC ACT Lab we conduct research on coordinated multi-robot systems. One topic we are particularly interested in is coordinating teams consisting of multiple types of robots with different physical capabilities.
A team of three quadrotors all controlled with Crazyflie 2.0 and a Clearpath Turtlebot
Applications such as search and rescue or mapping could benefit from such heterogeneous teams because they allow for more flexibility in the choice of sensors and locomotive capability. A core challenge for any multi-robot application is motion planning – all of the robots in the team need to make it to their target locations efficiently while avoiding collisions with each other and the environment. We have recently demonstrated a scalable method for trajectory planning for heterogeneous robot teams utilizing the Crazyflie 2.0 as the flight controller for our aerial robots.
A Crazier Swarm
To test our trajectory planning research we wanted to assemble a team with both ground robots and multiple sizes of aerial robots. We additionally wanted to leverage our existing Crazyswarm software and experience with Crazyflie firmware to avoid some of the challenges of working with new hardware. Luckily for us the BigQuad deck offered a straightforward way to super-size the Crazyflie 2.0 and gave us the utility we needed.
With the BigQuad deck and off-the-shelf components from the hobbyist drone community we built three super-sized Crazyflie 2.0s. Two of them weigh 120g (incl. battery) with a motor-to-motor size of 130mm, and the other is 490g (incl. battery and camera) with a size of 210mm.
120g, 130mm
490g, 210mm
We wanted to pick components that would be resistant to crashing while still offering high performance. To meet these requirements we ended up picking components inspired by the FPV drone racing community where both reliable performance and high-impact crashes are expected. Full parts lists for both platforms are available here
Integrating the new platforms into the Crazyswarm was fairly easy. We first had to re-tune the PID controller gains to account for the different dynamics of the larger platforms. This didn’t take too long, but we did crash a few times — luckily the components we chose were able to handle the crashes without any breakages. After tuning the platforms behave very well and are just as easy to work with as the original Crazyflie 2.0. We additionally updated the Crazyswarm package to be able to differentiate between BigQuad and regular Crazyflie types and those updates are now available for use by anyone!
In future work, we are excited to do hands-on experiments with a prototype of the CF-RZR. This new board seems like a promising upgrade to the CF 2.0 + BQD combination as it has upgraded components, an external antenna, and a standardized form factor. Hopefully we will see the CF-RZR as part of the Crazyswarm in the near future!