So we are now back in the cold and dark Sweden after about a weeks visit to a warm and nice Shenzhen, China. Every time we go there something major has happened. When we visited last time, about a year ago, cash was king. Now apparently payments are done with QR codes, even in small lunch restaurants. And I was kind of proud about the BankID and Swish payments we have here is Sweden, until now… Another observation we did was that there are now a lot of colorful rental bikes which can be found about everywhere and which can be rented for around 1 RMB/hour. A great way of resource sharing and pushing Eco-friendly transportation. It has it downside though as piles of bikes could be commonly found and e.g. written about by theguardian.
Aside from the above observations the Maker Faire Shenzhen was one of the reasons we came to visit. As Shenzhen is called the “the silicon valley for hardware” we had pretty high expectations when coming to the Maker Faire. Even though it was a great Faire it did not really reach our high expectations but it is growing fast and I’m pretty sure in a couple of years it is the Maker Faire to be at. A quick summarize, robotics was one of the top categories of products on the faire. 3D printers which are popular on European and US faires was not that common which surprised us. Now let the pictures do the talking:
We exhibited on the faire sharing booth with Seeedstudio where we showed an autonomous sequence on top of a table using the flow deck. By pressing a button, the Crazyflie 2.0 would take of, fly in a circle, come back and land roughly in the same spot. It was a very engaging demo catching many peoples attention and especially the kids. The kids constantly wanted to press the button and interact with the Crazyflie.
All the interaction made us very happy and next time we will try to add the obstacle avoidance deck to make it even more engaging.
Unfortunately the Crazyradio PA is out of stock in our store and is estimated back around December 1. Until then please checkout our distributors for availability.
Grasping objects is a hard task that usually implies a dedicated mechanism (e.g arm, gripper) to the robot. Instead of adding extra components, have you thought about embedding the grasping capability to the robot itself? Have you also thought about whether we could do it flying?
In the GRASP Laboratory at the University of Pennsylvania, we are concerned about controlling robots to perform useful tasks. In this work, we present the Flying Gripper! It is a novel flying modular platform capable of grasping and transporting objects with the help of multiple quadrotors (crazyflies) working together. This research project is coordinated by Professor Mark Yim and Professor Vijay Kumar, and led by Bruno Gabrich (PhD candidate) and David Saldaña (Postdoctoral researcher).
Inspiration in Nature
In nature, cooperative work allows small insects to manipulate and transport objects often heavier than the individuals. Unlike the collaboration in the ground, collaboration in air is more complex especially considering flight stability. With this inspiration, we developed a platform composed of four cooperative identical modules where each is based on a quadrotor (crazyflies) within a cuboid frame with a docking mechanism. Pair of modules are able to fly independently and physically connect by matching their vertical edges forming a hinge. Four one degree of freedom (DOF) connections results in a one DOF four-bar linkage that can be used to grasp external objects. With this platform we are able to change the shape of the flying vehicle during flight and use its own body to constrain and grasp an object.
Flying Gripper Design and Motion
In the proposed modular platform, we use the Crazyflie 2.0. Its battery life lasts around seven minutes, though in our case battery life time is reduced due to the extra weight. The motor mounting was modified from the standard design, we tilted the rotors 15 degrees. This was necessary as more yaw authority was required to enable grasping as a four-bar. However, adding this tilt reduces the lifting thrust by 3%. Axially aligned cylindrical Neodymium Iron Boron (Nd-FeB) magnets, with 1/8″ of diameter and 1/4″ of thickness are mounted on each corner enabling edge-to-edge connections. The cylindrical magnets have mass of 0.377g and are able to generate a force of 0.4 kg in a tangential connection between two of the same magnets. This forms a strong bond when two modules connect in flight. Note that the connections are not rigid – each forms a one DOF hinge.
The four attached modules results in a one DOF four bar linkage in addition to the combined position and attitude of the conglomerate. The four-bar internal angles are controlled by controlling the yaw attitude of each module. For example, two modules rotate clockwise and other two modules rotate counter-clockwise in a coordinated manner.
Grasping Objects
Collaborative manipulation in air is an alternative to reduce the complexity of adding manipulator arms to flying vehicles. In the following video we are able to see the Flying Gripper changing its shape in midair to accomplish the complex task of grasping a wished coffee cup. Would you like some coffee delivery?
This work was developed by:
Bruno Gabrich, David Saldaña, Vijay Kumar and Mark Yim
It has been a while since we have made a blog post about the the community and quite a lot has happened, and is about to happen, so we though we would do an update for this Monday post.
Fred, the Crazyflie android client community maintainer was visiting us last week. He is making great progress on the Java Crazyflie lib that is going to be used in the Android client as well as in PC clients. The lib is still experimental but when finished it will allow to connect and use a Crazyflie from any Java program, there has already been some successful experimentation done using it from Processing.
Thanks to Sean Kelly, the Crazyflie 2.0 is now officially supported by the Betaflight flight controller firmware. Betaflight is a flight controller firmware used a lot in the FPV and drone racing community. This is the announcement by theseankelly in the forum:
Betaflight 3.2 was officially released this month. This is the first release that contains the Crazyflie 2.0 target by default, so you don’t need to clone and build from source anymore. It’s available as a target in the betaflight configurator from the google chrome store! I’ve tested it out and it works as expected. Haven’t tested the BigQuad variant, but that’s also available in the app by default.
The Crazyswarm project, by Wolfgang Hoenig and James A. Preiss from USC ACTlab has been presented at ICRA 2017. It is a framework that allows to fly swarms of Crazyflie 2.0 using a motion capture system. There is currently some work done on merging the Crazyswarm project into the Crazyflie master branch, this will make it even easier to fly a swarm of Crazyflie. In the meantime the project is well documented and can be used by anyone that has a couple of Crazyflies and a motion capture system.
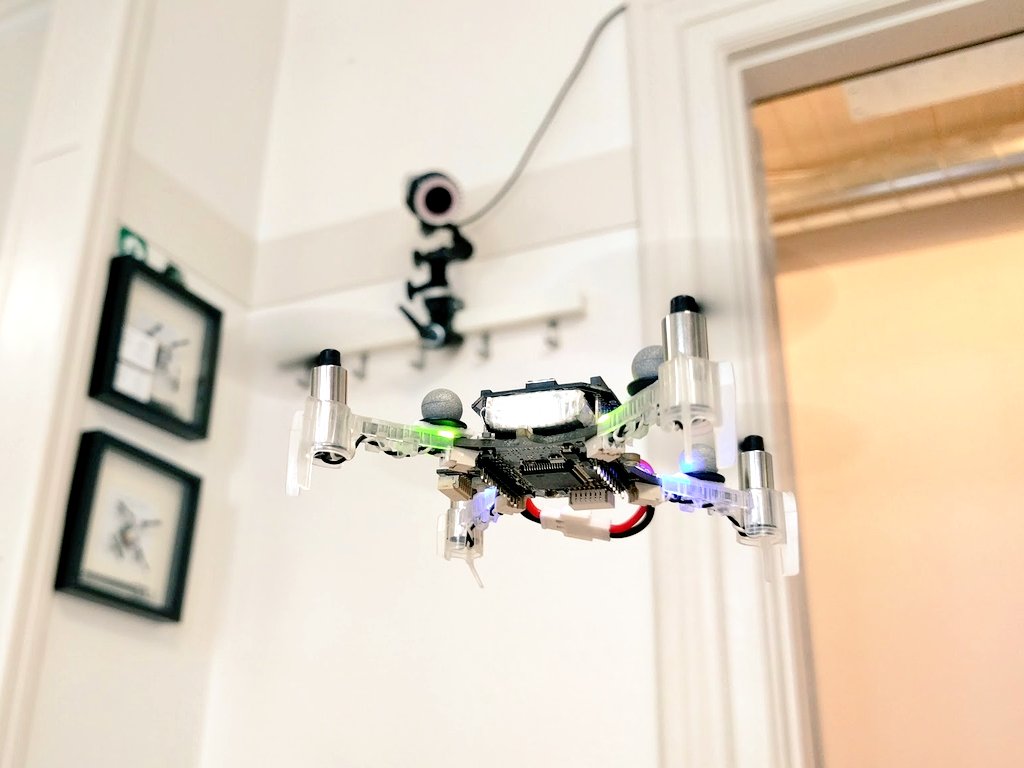
A few weeks ago we wrote about a new prototype that we call “the obstacle avoidance deck”. Basically it’s a deck fitted with multiple VL53L0x ToF distance sensors that measures the distance front/back, right/left and up of the Crazyflie 2.0. Combined with the Flow deck this gives you an X/Y/Z robot that you can program fly around avoiding obstacles which doesn’t need any external positioning system.
After implementing firmware support for the deck (see #253 and #254) we’ve finally had a chance to do some initial testing, see the video below. In the current implementation we’re doing the measurements in the firmware but using the logging framework to get all the distances into a Python script which does the movement control. Since we have the Flow deck attached we can control the Crazyflie 2.0 in velocity mode, which means we can say things like “Go forward with 0.5 m/s until the forward sensor shows a distance lower than 50cm” or “Go forward 1 m/s for 1s and rotate to measure the distance to all objects”. Since there’s no real-time requirements we can move the complexity of the algorithm from the firmware into external scripting which makes it a lot easier to develop. Now we’re really eager to start setting up obstacle courses and time how fast we can move though them :-)
The results from the testing shows that our two main concerns aren’t an issue: The sensors doesn’t seem to interfere with each other and we can sample them all at high-enough frequency without occupying the bus too heavily (currently we’re doing 20Hz). The next step is figuring out the requirements (i.e how many VL53L0x sensors are needed, do we really need the back one?) and a mechanical solution for attaching the sensors in production. If there’s any feedback let us know now and we’ll try to get it into the design. Also, we really need a new name for the board. Any suggestions?
The idea is that we can detect the proximity of the hand with the ranging sensor contained in the flow breakout and detect how the hand is moving with the optical flow sensor. The flow sensor is very similar to an optical mouse sensor so we are just inverting the concept to move the environment (the hand) instead of moving the flow sensor against a table. Using an Arduino Leonardo our hack is recognized as a regular mouse by any computer.
As a result, it works quite well but it requires some training to get the mouse to go where we want. We would not use this as our regular pointing device any time soon but we think is a nice example of what can be achieved with the flow breakout board:
As we announced recently, the Flow deck for the Crazyflie has been released. There was a high demand the first days and we were unfortunately out of stock in the store for a short time, but now we are restocked and the deck is available again. We also got a shipment of a few production Flow decks to the office, and of course we wanted to play a bit with them to find the limits. During development of the deck we only had one or two working prototypes at a time, but now there were manny, so what could we do?
Swarm with the Flow deck
Aggressive flying
So far we have flown slowish when using the Flow deck and we know that works, but what about more aggressive manoeuvres? We modified the flowsequenceSync.py script in the examples directory of the crazyflie-lib-python library. The original script flies a figure 8 at 0.5 m/s, and we spiced it up to do 1.5 m/s instead.
It works pretty well as you can see in the video but we get a drift for every finished figure 8 and we have not really figured out yet the origin of this error. There are a number of potential error sources but it needs further investigation to be fully understod.
Flying one Crazyflie above another
What if one Crazyflie flies above another? How will that affect the performance of the Flow deck? The optical flow sensor is in essence a camera detecting the motion of the floor, a Crazyflie passing through the field of view could potentially confuse the system.
We set up two Crazyflies to fly on a straight line in opposite directions, one 0.5 m above the other. The result was that the top Crazyflie was almost not affected at all when the other passed under it, just a small jerk. The lower one on the other hand, passed through the turbulence of the top one and this caused it to swing quite a lot, though it managed to more or less continued in the correct direction it was decidedly out of track. As expected, flying above another Crazyflie is not a good idea, at least not too close.
Flying a swarm with the Flow deck
When flying with the Flow deck all navigation is based on dead reckoning from the starting position, is it possible to fly a swarm using this technique? We thought that by putting the Crazyflies in well known starting positions/orientations and feed them trajectories that do not cross (or pass over each other) it should be possible. The start turned out to be critical as the system is a bit shaky at altitudes under 10 cm when the sensors on the Flow deck are not working very well yet. Sometimes the Crazyflie moves slightly during take-off and this can be a showstopper if it rotates a bit for instance, as the trajectory also will be rotated. It worked pretty well in most cases but sometimes a restart was required.
We were inspired by the Crazyswarm from USC and decided to fly 5 Crazyflies with one in the center and the other 4 spinning around it. Note the center Crazyflie turning but staying on the spot.
We used the Swarm class in the python library to control the 5 Crazyflies. The code used to connect to the Crazyflies one by one which takes quite some time, we changed it to a parallel connect while we were at it and got a significant speed up.
It is a lot of fun playing with the Flow deck and scripting flights. I know it might be silly, but we laugh the hardest when we fail and crash, the more spectacular the crash the more happiness!
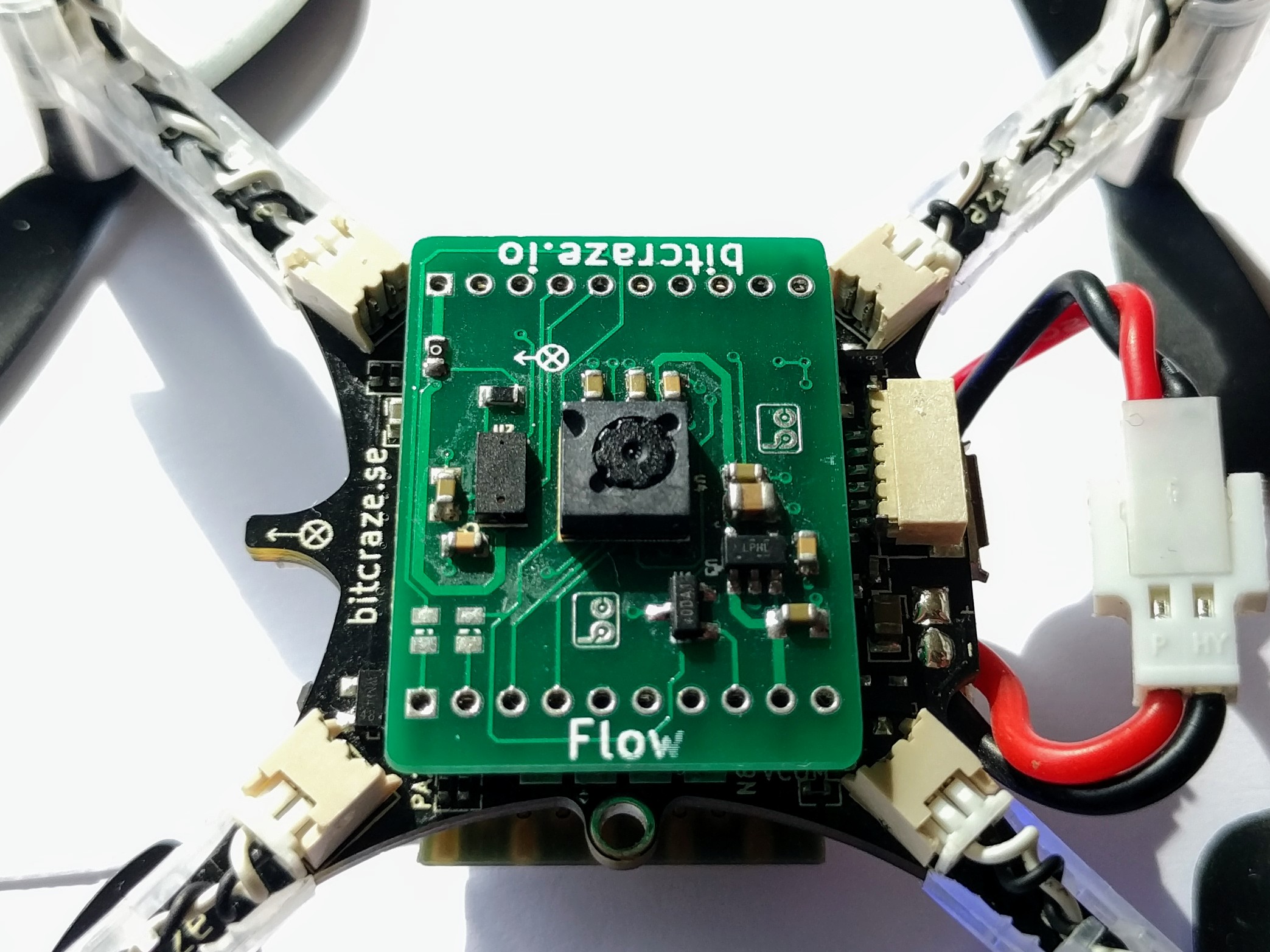
The Flow breakout
For other robotics projects that don’t use the Crazyflie, remember that the same functionality as the Flow deck delivers soon will be available in the Flow breakout board. It is compatible with Arduino and other hosts.
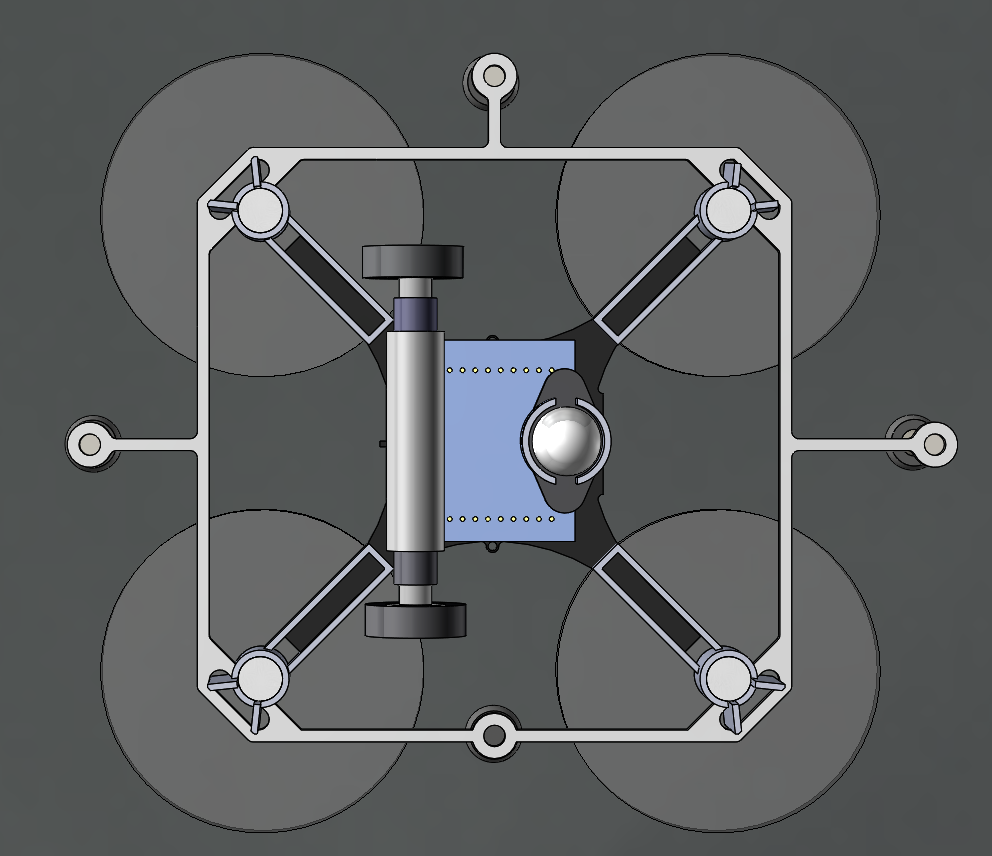
Robots that can both fly and drive – in particular wheeled drones – are actually somewhat of a rarity in robotics research. Although there are several interesting examples in the literature, most of them involve creative ways of repurposing the wings or propellers of a flying robot to get it to move on the ground. Since we wanted to test multi-robot algorithms, we needed a robot that would be robust, safe, and easy to control – not necessarily advanced or clever. We decided to put an independent driving mechanism on the bottom of a quadcopter, and it turns out that the Crazyflie 2.0 was the perfect platform for us. The Crazyflie is easily obtainable, safe, and (we can certify ourselves) very robust. Moreover, since it is open-source and fully programmable, we were able to easily modify the Crazyflie to fit our needs. Our final design with the wheel deck is shown below.
A photo of the Crazyflie 2.0 with the wheel deck.
A model of the Crazyflie 2.0 with the wheel deck from the bottom
The wheel deck consists of a PCB with a motor driver; two small motors mounted in a carbon fiber tube epoxied onto the PCB; and a passive ball caster in the back. We were able to interface our PCB with the pins on the Crazyflie so that we could use the Crazyflie to control the motors (the code is available at https://github.com/braraki/crazyflie-firmware). We added new parameters to the Crazyflie to control wheel speed, which, in retrospect, was not a good decision, since we found that it was difficult to update the parameters at a high enough rate to control the wheels well. We should have used the Crazyflie RealTime Protocol (CRTP) to send custom data packages to the Crazyflie, but that will have to be a project for another day.
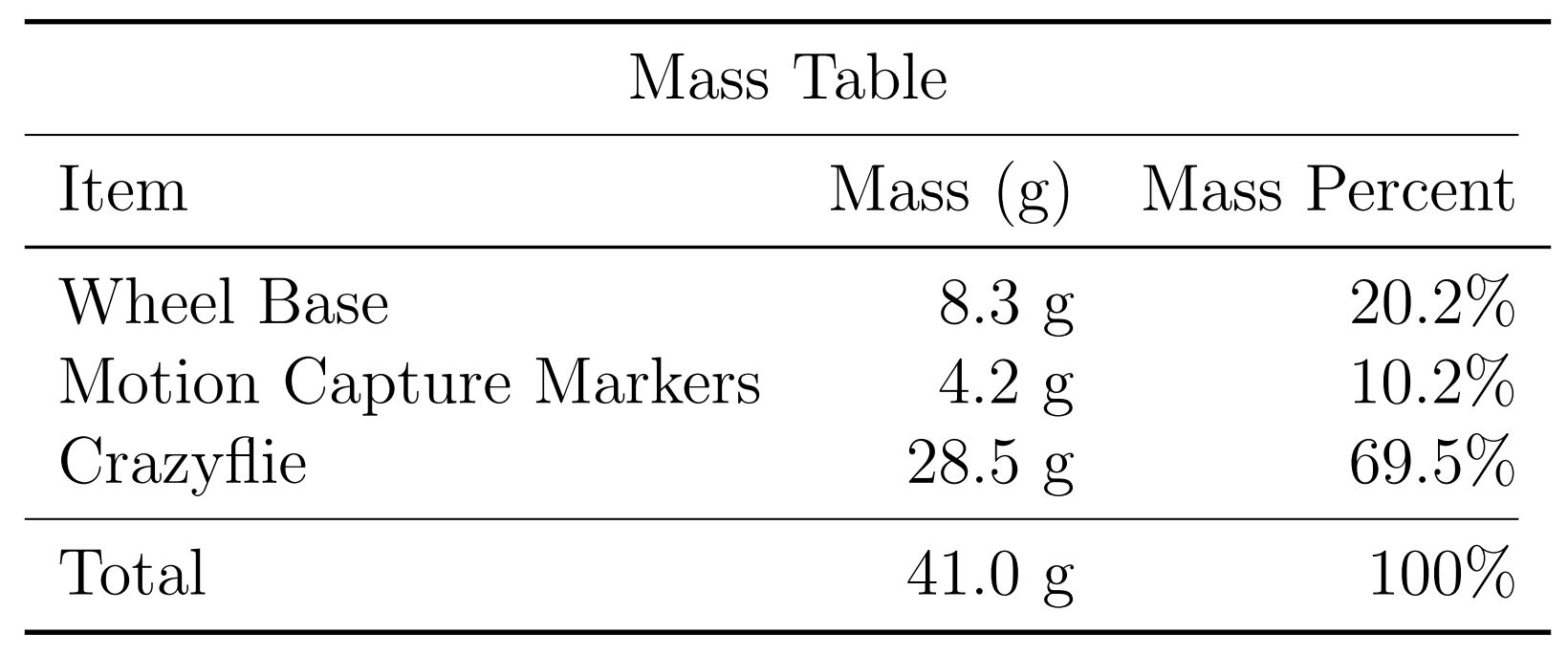
The table below shows the mass balance of our miniature ‘flying car.’ The wheels added 8.3g and the motion capture markers (we used a Vicon system to track the quads) added 4.2g. So overall the Crazyflie was able to carry 12.5g, or ~44% of its body weight, and still fly pretty well.
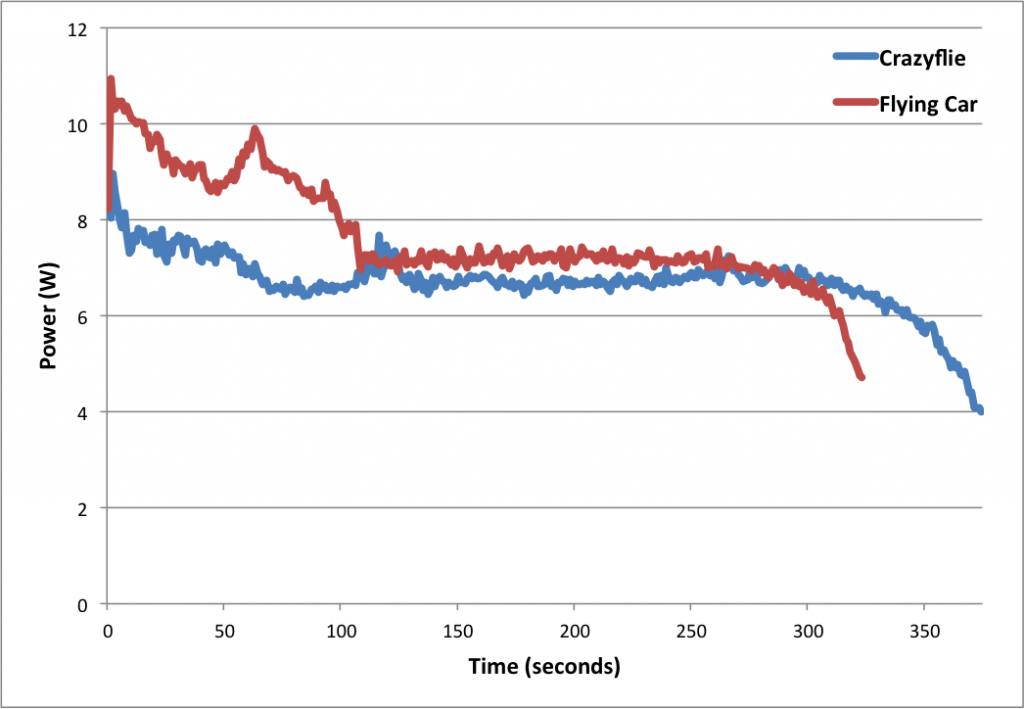
Next we measured the power consumption of the Crazyflie and the ‘Flying Car.’ As you can see in the graph below, the additional mass of the wheels reduced total flight time from 5.7 minutes to 5.0 minutes, a 42-second or 12.3% reduction.
Power consumption of the Crazyflie vs. the ‘Flying Car’
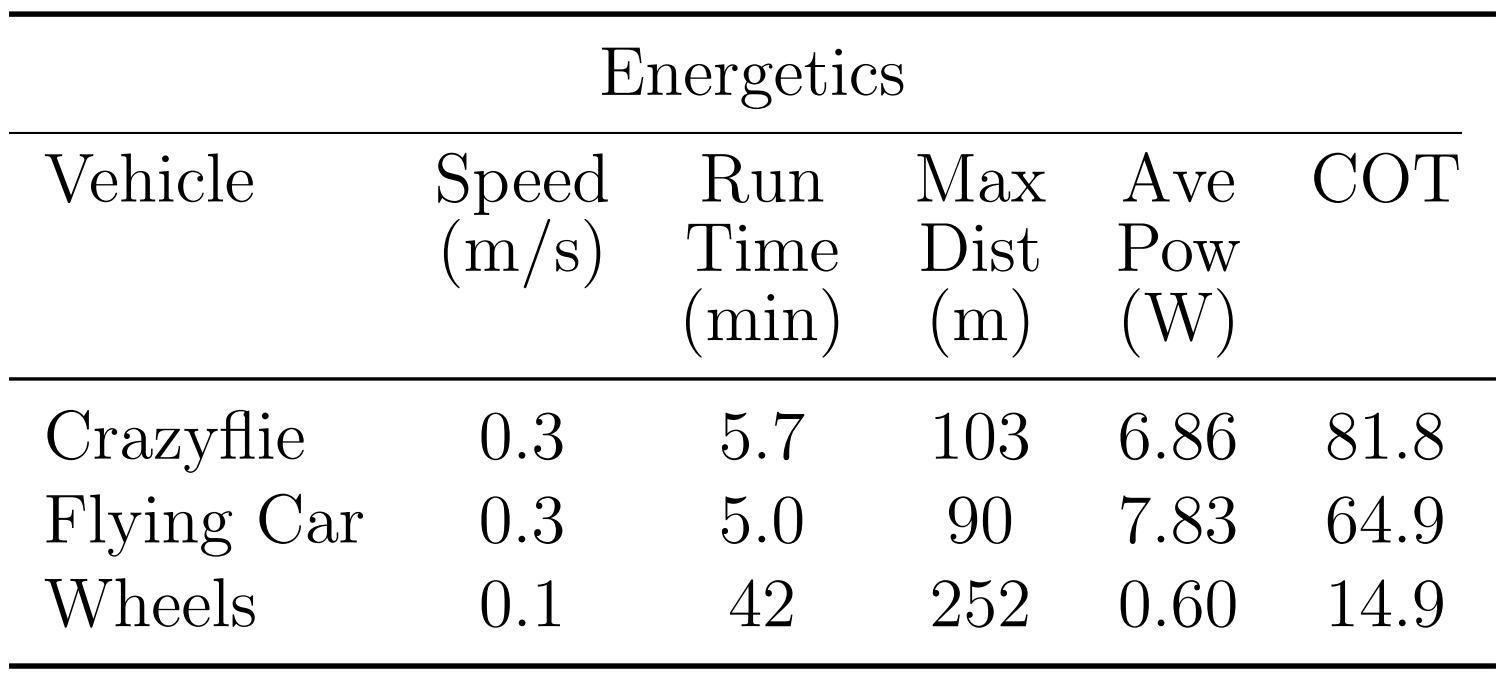
The table below shows more comparisons between flying without wheels, flying with wheels, and driving. The main takeaways are that driving is much more efficient than flying (in the case of quadcopter flight) and that adding wheels to the Crazyflie does not actually reduce flying performance very much (and in fact increases efficiency when measured using the ‘cost of transport’ metric, which factors in mass). These facts were very important for our planning algorithms, since the tradeoff between energy and speed is the main factor in deciding when to fly (fast but energy-inefficient) versus drive (slow but energy-efficient).
Controlling 8 Crazyflies at once was a challenge. The great work by the USC ACT Lab (J. A. Preiss, W. Hönig, G. S. Sukhatme, and N. Ayanian. “Crazyswarm: A Large Nano-Quadcopter Swarm,” ICRA 2017. https://github.com/USC-ACTLab/crazyswarm) has made our minor effort in this field obsolete, but I will describe our work briefly. We used the crazyflie_ros package, maintained by Wolfgang Hönig from the USC ACT Lab, to interface with the Crazyflies. Unfortunately, we found that a single Crazyradio could communicate with only 2 Crazyflies at a time using our methods, so we had to use 4 Crazyradios, and we had to make a ROS node that switched between the 4 radios rapidly to send commands. It was not ideal at all – moreover, we had to design 8 unique Vicon marker configurations, which was a challenge given the small size of the Crazyflies. In the end, we got our system to work, but the new Crazyswarm framework from the ACT Lab should enable much more impressive demos in the future (as has already been done in their ICRA paper and by the Robust Adaptive Systems Lab at Carnegie Mellon, which they described in their blog post here).
We used two controllers, an air and a ground controller. The ground controller was a simple pure pursuit controller that followed waypoints on ground paths. The differentially steered driving mechanism made ground control blissfully simple. The main challenge we faced was maximizing the rate at which we could send commands to the wheels via the parameter framework. For aerial control, we used simple PID controllers to make the quads follow waypoints. Although the wheel deck shifted the center of mass of the Crazyflie, giving it a tendency to slowly spin in midair, overall the system worked well given its simplicity.
Once we had the design and control of the flying cars figured out, we were able to test our path planning algorithms on them. You can see in the video below that our vehicles were able to faithfully follow the simulation and that they transitioned from flying to driving when necessary.
Our work had two goals. One was to show that multi-robot path planning algorithms can be adapted to work for vehicles that can both fly and drive to minimize energy consumption and time. The second goal was to showcase the utility of flying-and-driving vehicles. We were able to achieve these goals in our paper thanks in part to the ease of use and versatility of the Crazyflie 2.0.
A couple of weeks ago Qualisys visited us at the Bitcraze office, they came with the Miqus motion capture system that they installed temporary in the office. This gave us the opportunity to play with their motion capture system and the Crazyflie 2.0 :-).
It was our first hands-on experience with a motion capture system. We were eager to try the algorithms that have been developed for the loco positioning system with the more precise position information offered by the motion capture. The result was above our expectations. You get a bit amazed when it is just sitting there in the air. The normally difficult in-air photo shoot became a breeze since you suddenly have plenty of time to focus and shoot.
After running a couple of simple stabilized flight demos, we endeavored to run the ICRA demo with motion capture instead of our loco positioning system. As the loco positioning deck isn’t needed it was removed and instead the measured position was sent using Crazyradio. Doing so made the demo work pretty much out of the box. The ICRA demo had 2 buttons, one for playing a pre-recorded trajectory and one for recording a path and playing it back as soon as the Crazyflie is dropped. Both modes worked seamlessly without requiring any code change. We tried the path recording and playback functionality and were pretty impressed by the precision:
We look forward of meeting and working more with Qualisys. One goal is to provide better information, documentation and tools to get started with Crazyflie in a motion capture system.
For a while now we have been selling the BigQuad deck which makes it possible to transform the CF2 to control a bigger sized drone. It does so by becoming the quadrotor control board, controlling external brushless motor controllers, which allows to scale up the size. This can be very convenient when trying out/developing new things as it first can be tested on the small CF2 and later scaled up by attaching it to a bigger quad. However for a more permanent setup it is a bit bulky, so we have been playing around a bit and designed something in the middle. The result is a stand alone control board targeting quads around 0.1 – 0.5kg.
We call it the CF-RZR as it is inspired by the smaller sized racers with some fundamental differences. It is designed with a higher level of autonomous functionality in mind and being easy to repair while still being fully compatible with the CF2 firmware and decks. Listing the biggest features of the current prototype:
Fully compatible with the CF2 firmware, expansion decks as well as radio.
Connectors to attach motor controllers (still possible to solder though) so it is easy to build and repair.
Power distributions built into controller board. (Max ~8A per motor controller though)
Motor controllers can be switched of by the system so the system can go into deep sleep and consume around 50uA.
Voltage input 1S-4S (3V to 17V)
Standard mounting (M3 mounting holes placed 30.5mm square)
External antenna for increased range
To summarize, the strength of the CF2 but in a little bit bigger package :-). Last week we got a chance to test fly it for the first time. We used a off the shelf racer frame, ESC and motors. At first it did not fly that well at all but after some PID tuning it became pretty stable and we had a lot of fun :-).
We would love your feedback, good/bad idea, what do you like/dislike etc!
We had a booth where we demoed autonomous flight with the Crazyflie 2.0 and the Loco Positioning system, without any external computer in the loop. The core of the demo was that the Crazyflie had an onboard trajectory sequencer that enabled it to fly autonomously along a path, based on the position from the Loco Positioning system.
We had a pre programmed path that we used most of the time, since it enabled us to start the demo and the leave the Crazyflie without any further manual interference from our side (except changing battery). The other option was to manually record a path for the Crayzflie to retrace by moving it around in the flying space. When we dropped it (detecting zero gravity) the onboard sequencer and controller took over to replay the recorded path. This mode was very useful when showing the accuracy and performance of the system by recording a short sequence of one point and just leaving the Crazyflie to hover. We had mounted a deck with two buttons on the Crazyflie that we used to chose which mode to use.
The code used for the demo is available at github for anyone to play with.
Optical flow
We also showed our brand new Flow deck that we will release soon. It is a deck that is mounted underneath the Crazyflie with a downwards facing optical flow sensor. The sensor is in essence what is used in an optical mouse but with a different lens that enables it to track motion further away. The output from the deck is delta X and Y for the motion of the Crazyflie and can be used by the onboard controller to control the position. We will publish more information in this blog soon.
We had a great time talking to all you interesting, bright and awesome people. Thanks for all feedback, sharing ideas and telling us about your projects!