Before the holidays we said that we would be doing some testing with attaching a GPS receiver to the Crazyflie. For now it’s just a bit of a quick hack, but we are planning on doing more development. Here’s a quick summary of where we’re currently at (yes, that’s a bad joke..).
We attached a GPS module based on the u-blox MAX-7 chip which is interfaced using the UART. The initial plan was to interface it using I2C, but this will probably not work out. We thought that we could use the I2C interface for reading out the data via a normal memory map (like an EEPROM), but the module will continuously stream the data on the bus. This means that the module probably won’t play nice with other devices on the bus (which kind of defeats the purpose of the bus in the first place). So UART it is. By default the module sends NMEA data every second over the interface. There’s lots of information to get here, but what we focused on was the fix status of the module and latitude/longitude/altitude. Currently the firmware doesn’t contain any string library so parsing data from strings sent on the UART isn’t that easy. Instead we decided to just forward all the incoming data on the UART to the CRTP console. On the client side the NMEA data is picked up from the console and parsed. This data is then visualized using KDE Marble, where the position is shown on a map fetched from OpenStreetMap.
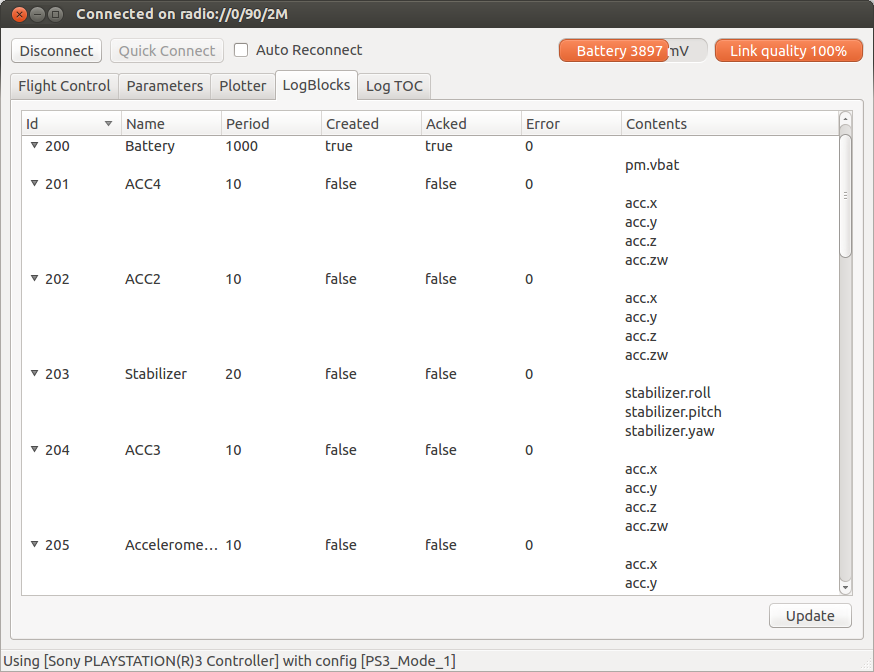
So what now? Well, there’s a few things more that we would like to do. First of all the data shouldn’t be sent over the CRTP console, the logging framework should be used for this. So we need to parse the lat/long/alt/fix data coming from the module and place into variables that can be logged. But there’s functionality that we would like that doesn’t fit within the logging/parameter framework, so a new gps port will be added. Using this port we are planning on making more data available (like information about satellites). But the main reason for this new port is to be able to send data to the GPS implementation in order to implement A-GPS to minimize the time to get a position fix. So by downloading the GPS almanac online and uploading via the radio to the Crazyflie the first time to fix should be shortened considerably.
If you would like to give it a try then have a look at the GPS hacks page om the Wiki for instructions. Note that on Ubuntu 13.10 (and probably other distros as well) the Marble build doesn’t include the Python bindings, so you will have to build Marble from source and enable them. If you would like to play around a bit with Marble here are some docs: Python examples and C++ API. If you don’t have a GPS module but still want to try it, then enable the DebugDriver. It will send fake lat/long/alt data to the UI. Oh, and if you figure out how to plot a path over the map, let us know ;-)
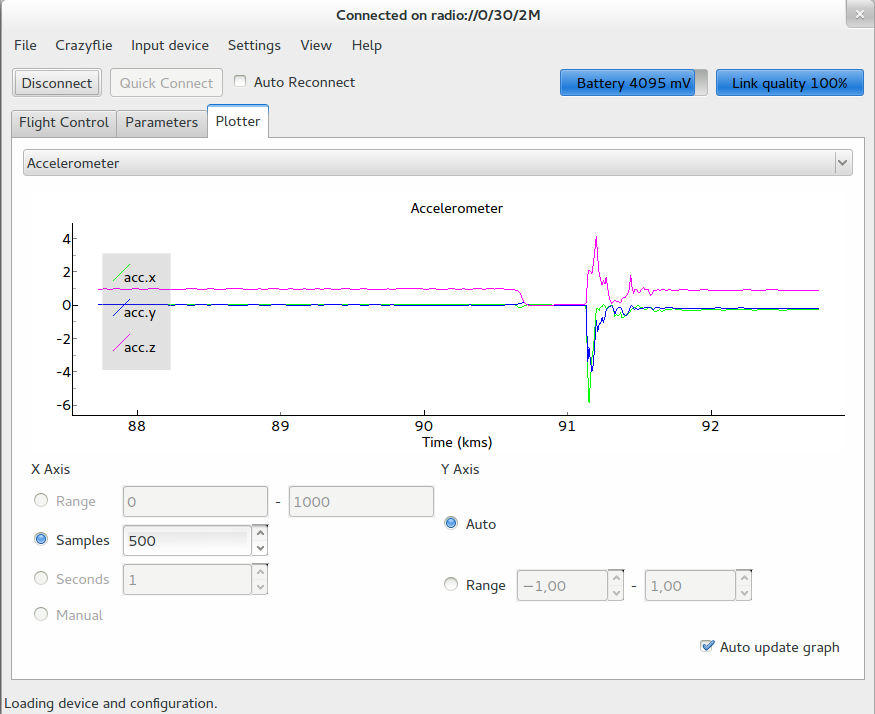
A quick note about dependencies for specific tabs in the Crazyflie python client. New tabs are added to the cfclient by creating a python file in the lib/cfclient/ui/tabs directory. So if you would like to add a tab for GPS you would just create a GpsTab.py file and this will automatically be picked up when the application starts up. Since we are now adding some dependencies that are just for specific tabs (like Marble for the GPS and PyQtGraph for the Plot) we have also added some decency checking. This means that if you don’t have Marble or PyQtGraph installed when starting the cfclient these tabs will still be listed in the menus, but will be disabled.
Finally, don’t forget about our holiday competition where you can win Crazyflies! There’s still one more week to go before it ends.
[pe2-gallery album=”http://picasaweb.google.com/data/feed/base/user/115721472821530986219/albumid/5964703597351683761?alt=rss&hl=en_US&kind=photo” ]