The summer has reached Sweden but this summer is not an ordinary summer. Coming from a pandemic spring, and not really knowing what the world is going to be like next, is not a situation we are used to. The covid situation in Sweden is looking a lot better now but we still have to be cautious and travel around as little as possible. That mean we will have a “homecation” or “hemester” as we say in Swedish.
We will recharge our batteries and get new inspiration and will try to embrace the “homecation”. During this time the pace at the Bitcraze office will be a bit slower but we will continue to ship products, answer emails, help you in the forum etc as usual all summer. The remaining time will be spent mainly on cleaning up as we normally do during summer. This includes bug fixing, documentation improvements, finishing small things that never gets done, etc. To summarize, improvements in general.
Who knew propellers would be that hard? Already from the very beginning with the Crazyflie 1.0, we had problems with very unbalanced propellers resulting in reduced flight performance. The fix at that time was to manually test and sort out the bad propellers. This worked well until the manufacturer’s injection mould got too worn down and we had to reject a lot of propellers. The manufacturer didn’t want to continue selling us the propellers unless we accepted them all. The hunt for a new manufacturer begun and after trying several, we finally, just in time for the Crazyflie 2.1, found one that could deliver well balanced propellers.
That could have been the end of a happy story but recently we found out that the new propellers tend to break too easily. The root cause seems to be that the center hole is too tight, causing tension in the plastic which makes it more fragile and prone to break.
Typically broken propeller
We don’t fully understand when this started but it looks like it was not that frequent in the beginning when the Crazyflie 2.1 was released and that it has increased from the batch manufactured in the end of July 2019. We don’t have data on how many propellers are bad but our estimation is around 20-40% and it is booth CW and CCW propellers. It also includes the spare part bundles manufactured in the second half of 2019.
Currently out main focus is to fix this propeller manufacturing issue. As soon as we have done so, we will lunch some form of replacement propeller program so that those of you that have gotten many bad propellers can get new ones for free. We don’t have any time estimate right now, and due to the world covid-19 crisis we have a feeling it can take a while. We are very sorry about this!
Insert propeller so it sits firmly, but not further
Workaround
There is an easy, but not ideal, workaround for this and that is to not push the propeller all the way down on the shaft. Instead stop when force is getting high and it holds the propeller in place. This will prevent the tension in the propeller to become big enough to break.
For those that have ordered after the 16th of March we have fixed the propellers by drilling the center hole slightly larger. This solves the problem for those units until we have fixed the root cause at the manufacturer.
When there is a possibility to name a release with only two’s and zero’s one has to take that opportunity right! Adding to that, it was about time to make a new release, and there is actually another reason. As we wrote about in the “What’s up 2020” blog post, it’s time to look back, finish up and make things more stable. This includes improving documentation, more examples/tutorials etc. With this release we create a good baseline to start this work from.
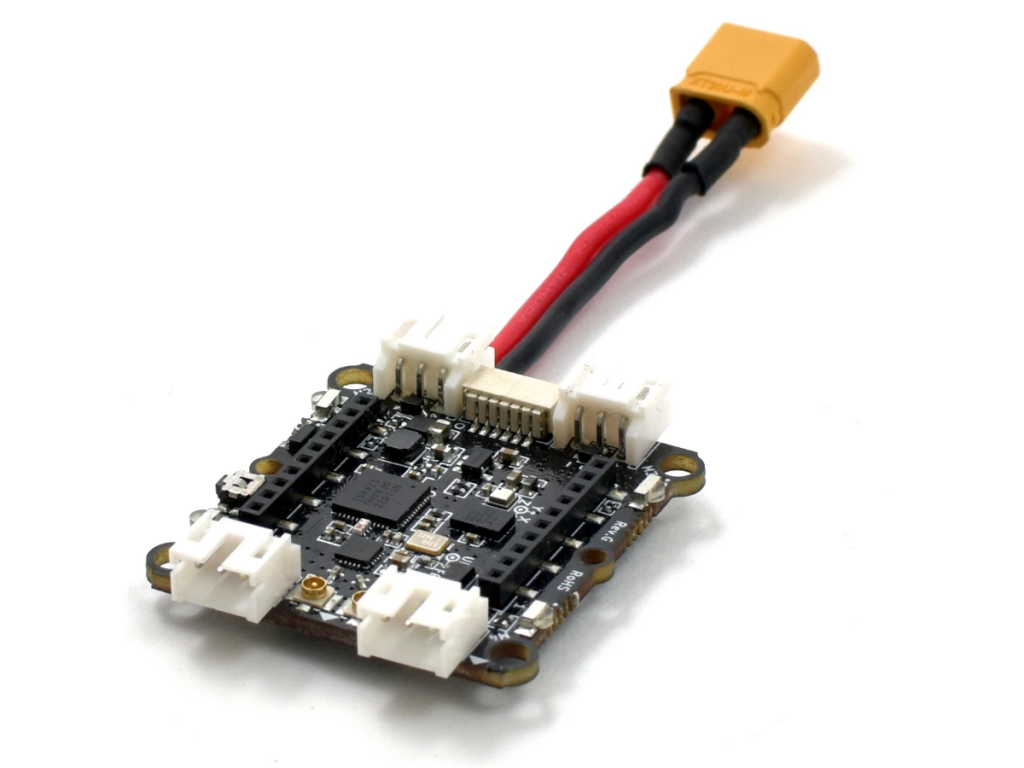
After a couple of delays we are happy to announce the Crazyflie Bolt is now stocked and ready to ship out. For those of you that are new to the Bolt, it is basically a Crazyflie 2.1 control board, but built to fit a bigger package. We have blogged about it a couple of times before, so if you would like to catch up you can start from the first idea, to maturing and finally changing name from RZR to Bolt. Another way to describe the Bolt is: Crazyflie 2.1 + Big-quad deck in one which doesn’t hog any deck expansion pins. Thus combinations such as Bolt + Led-ring + Lighthouse-4 is now possible or e.g. Bolt + Flow v2 + LPS.
Keep in mind that the Bolt is an early access product so you will most likely have to dig in to the code to hard-code PID-tuning parameters etc. Also trowing a warning finger, heavier drones can be very dangerous so be sure to keep safe!
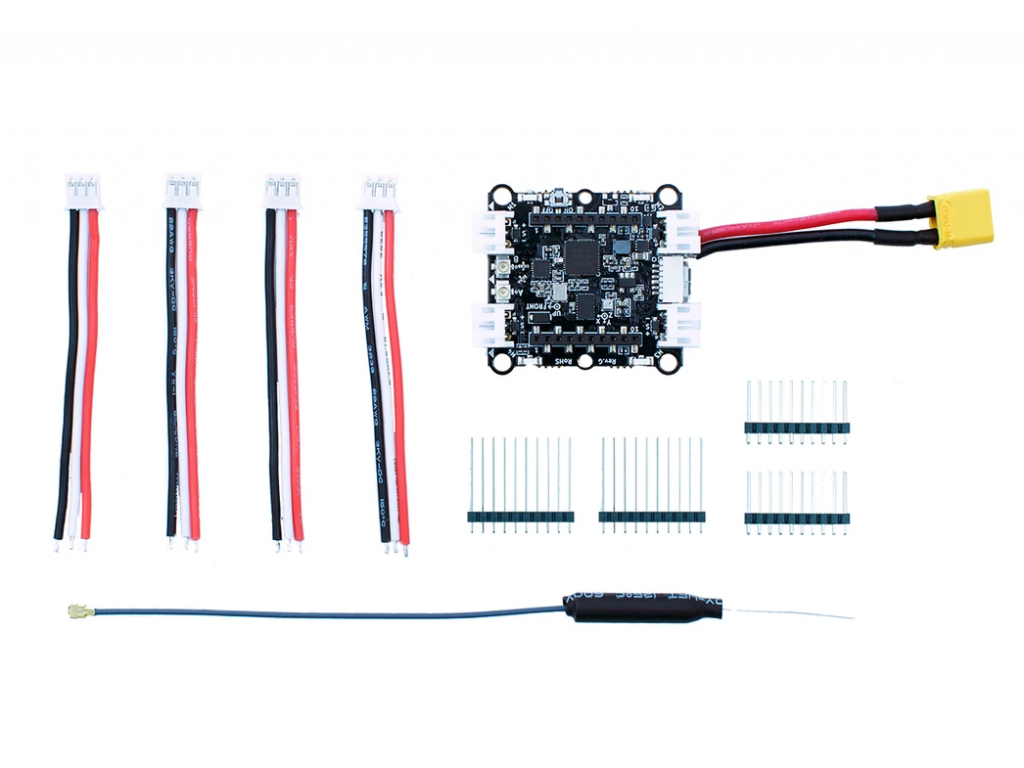
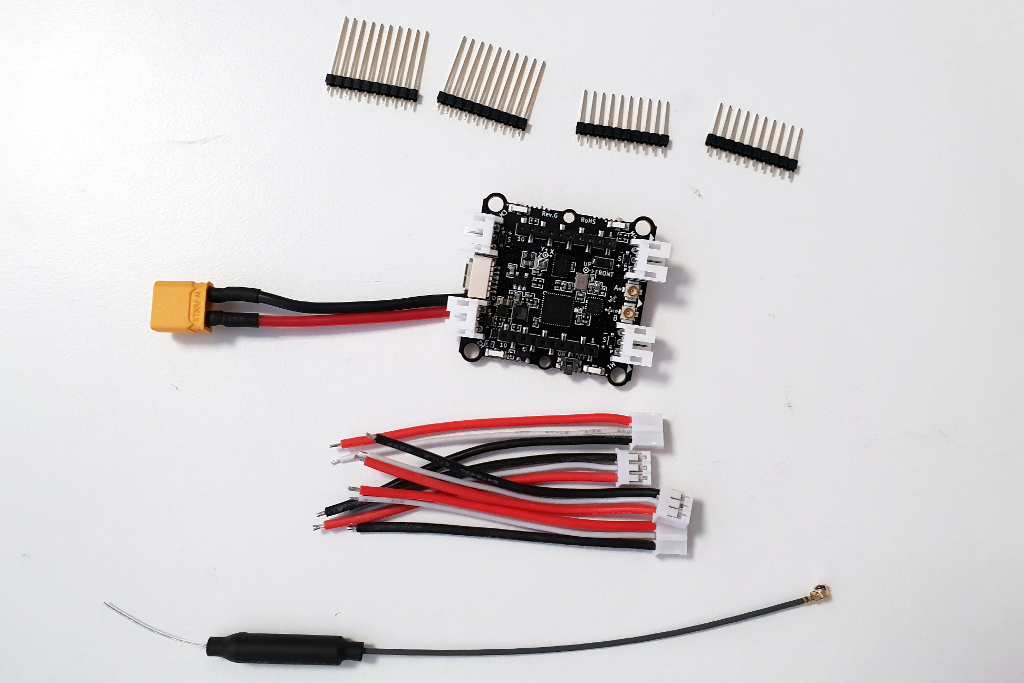
The Crazyflie Bolt is delivered as a stand alone control board. Frame, motors, propellers and battery needs to be added, for details check out the wiki. Unfortunately we don’t have a good reference kit to recommend at the moment. If you happen to have built a good one, please share.
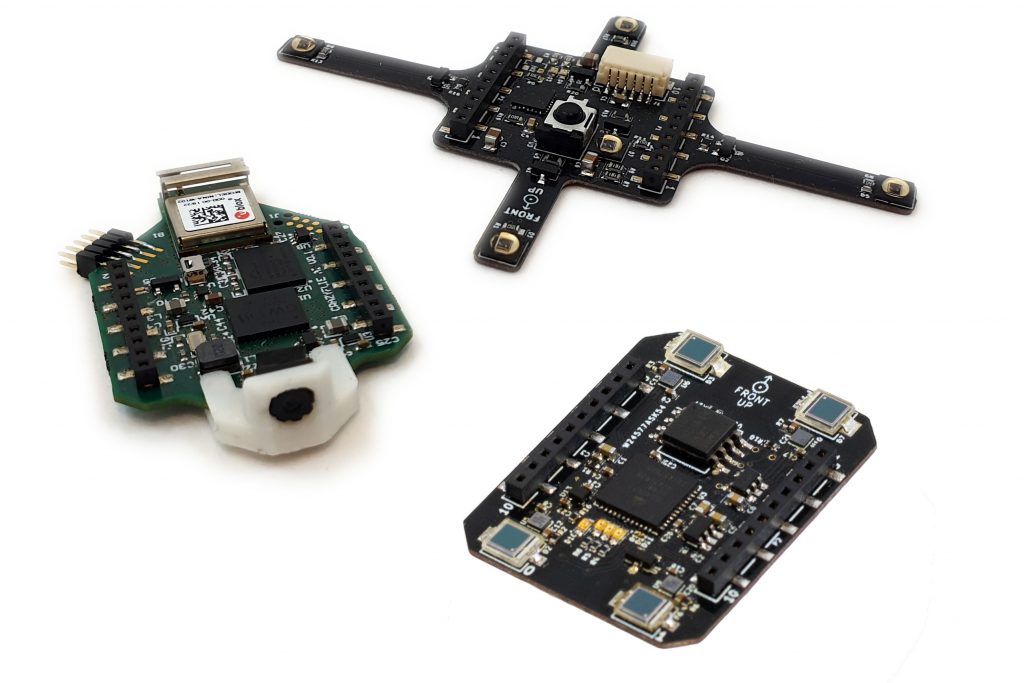
As pointed out in Daniele’s blog post about the PULP-DroNet we are collaborating on a AI-deck built around the new GAP8 RISC-V multi-core MCU. In the blog post you can find all the details around DroNet while here we will talk a bit about the AI-deck hardware. The AI-deck is similar to the PULP-Shield but with some optimizations. One of the HyperFlash memory spots has been removed, the communication interface slimmed down and a ESP32 (NINA module) has been added for WiFi connectivity.
Latest AI-deck prototype
So all together this a pretty good platform to develop low power AI on the edge for a drone.
Features:
GAP8 – Ultra low power 9 core RISC-V MCU
Himax HM01B0 – Ultra low power 320×320 greyscale camera.
512 Mbit HyperFlash and 64 Mbit HyperRAM
ESP32 for WiFi and more (NINA-W102)
2 x JTAG for GAP8 and ESP32
Currently we are doing the final testing of the hardware and hopefully we will launch production in the end of October. If production goes according to plan we hope we can offer it as an early access product just before X-mas. Make sure to come back and check the blog for more information about the progress as well as pricing.
We have now come to a the point were we will start manufacturing of the Crazyflie Bolt, Formally known as the RZR. You might wonder why we changed the name… Well the RZR more implies it is a Racer quad and it really isn’t. This is mainly because of the design in power distribution which is limited to around 8A per motor. However by using your own PDB it will work well for that too. But that is not the intention, it is more intended to have the strengths of the Crazyflie 2.1 but in a slightly bit bigger package. Therefore we wanted a better name for it and after a brainstorming session we came up with the name, Bolt. Both as it is a Crazyflie building block, a bolt used to fasten things, but also because it has the potential to be fast, as in a lightning bolt. Great name right :-)
The CF-Bolt development has been pushed back many times because of other more promising products, but finally it is getting here. If things goes according to plan, the Crazyflie Bolt should be in our shop in Aug-Sept. If you want to read up on the history and what it is all about read about the first flight to the almost-final prototype here.
A quick recap of the features:
Fully compatible with the CF2 firmware, expansion decks as well as radio.
Connectors to attach motor controllers (also possible to solder though) so it is easy to build and repair.
Power distributions built into controller board. (Max ~8A per motor controller) with XT30 connector.
Motor controllers can be switched off by the system (MOSFET) so the system can go into deep sleep and only consume around 50uA.
Voltage input 1S-4S (3V to 17V).
Standard mounting (M3 mounting holes spaced 30.5mm in a square).
Only a week left until we stand in our ICRA booth in Montreal and give you a gimps of what we do here at Bitcraze. As we have been writing about earlier we are aiming to run a fully automated demo. We have been fine tuning it over the last couple of days and if something unpredictable doesn’t break it, we think it is going to be very enjoyable. For those that are interested in the juicy details check out this informative ICRA 2019 page, but if you are going to visit, maybe wait a bit so you don’t get spoiled.
Apart from the demo we are also going to show our products as well as some new things we are working on. The brand new things include:
AI-deck, Active marker deck and Lighthouse-4 deck
AI-deck: This is a collaborative product between GreenWaves Technologies, ETH Zurich and Bitcraze. It is based on the PULP-shield that the Integrated and System Laboratory has designed. You can read more about it in this blog post. The difference with the PULP-shield is that we have added a ESP32, the NINA-W102 module, so that video can be streamed over WiFi. This we hope will ease development and add more use cases.
Active marker deck: Another collaboration, but this time with Qualisys. This will make tracking with their motion capture cameras easier and better. Some more details in this blog post. Qualisys will have the booth just next to us were it will be possible to see it in a live demo!
Lighthouse-4 deck: Using the Vive lighthouse positioning system this deck adds sub-millimeter precision to the Crazyflie. This is the deck used in the demo and could become the star of the show.
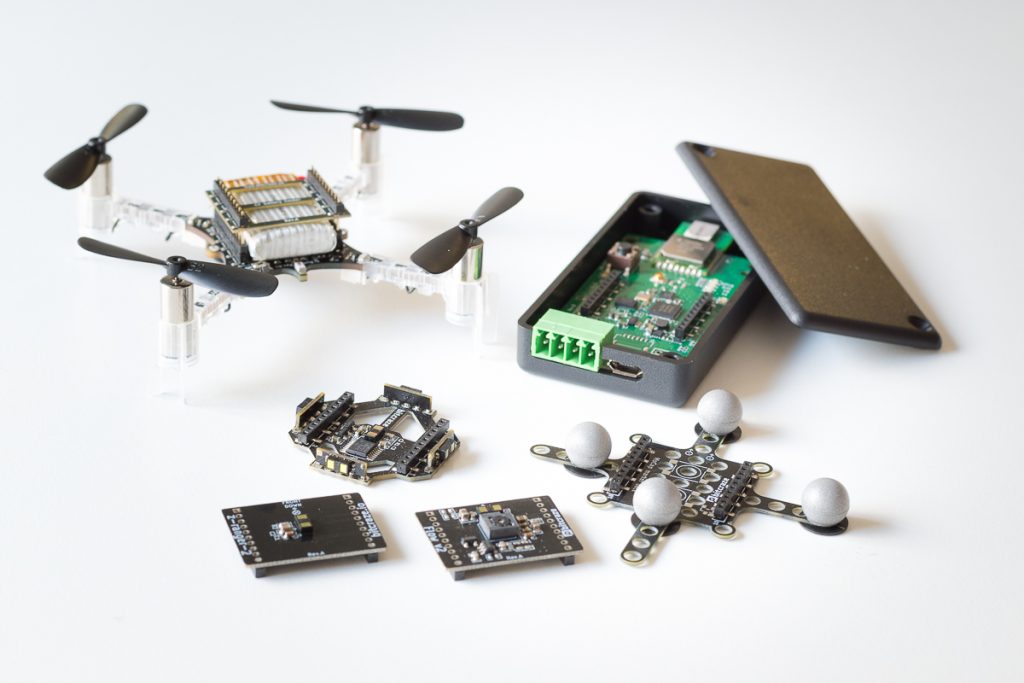
Adding to the above we will of course also display our recently released products:
Crazyflie 2.1: The Crazyflie 2.1 is an improvement of the Crazyflie 2.0 but keeping backward capability.
Better radio performance and external antenna support: With a new radio power amplifier we’ve improved the link quality and added support for dual antennas (on-board chip antenna and external antenna via u.FL connector)
Better power button: We’ve gotten feedback that the power button breaks too easily, so now we’ve replaced with a more solid alternative.
Improved battery cable fastening: To avoid weakening of the cables over time they are now run through a cable relief.
Improved sensors: To make the flight performance better we’ve switched out the IMU and pressure sensor. The new Crazyflie uses the drone specialized sensor combo BMI088 and BMP388 by Bosch Sensortech.
Flow deck v2: The Flow deck v2 has been upgraded with the new ST VL53L1x which increases the range up to 4 meters
Z-ranger deck v2: The Z-ranger v2 deck has been upgraded with the new ST VL53L1x which increases the range up to 4 meters
Multi-ranger deck: The Multi-ranger deck adds VL53L1x sensors in all directions for mapping and obstacle avoidance.
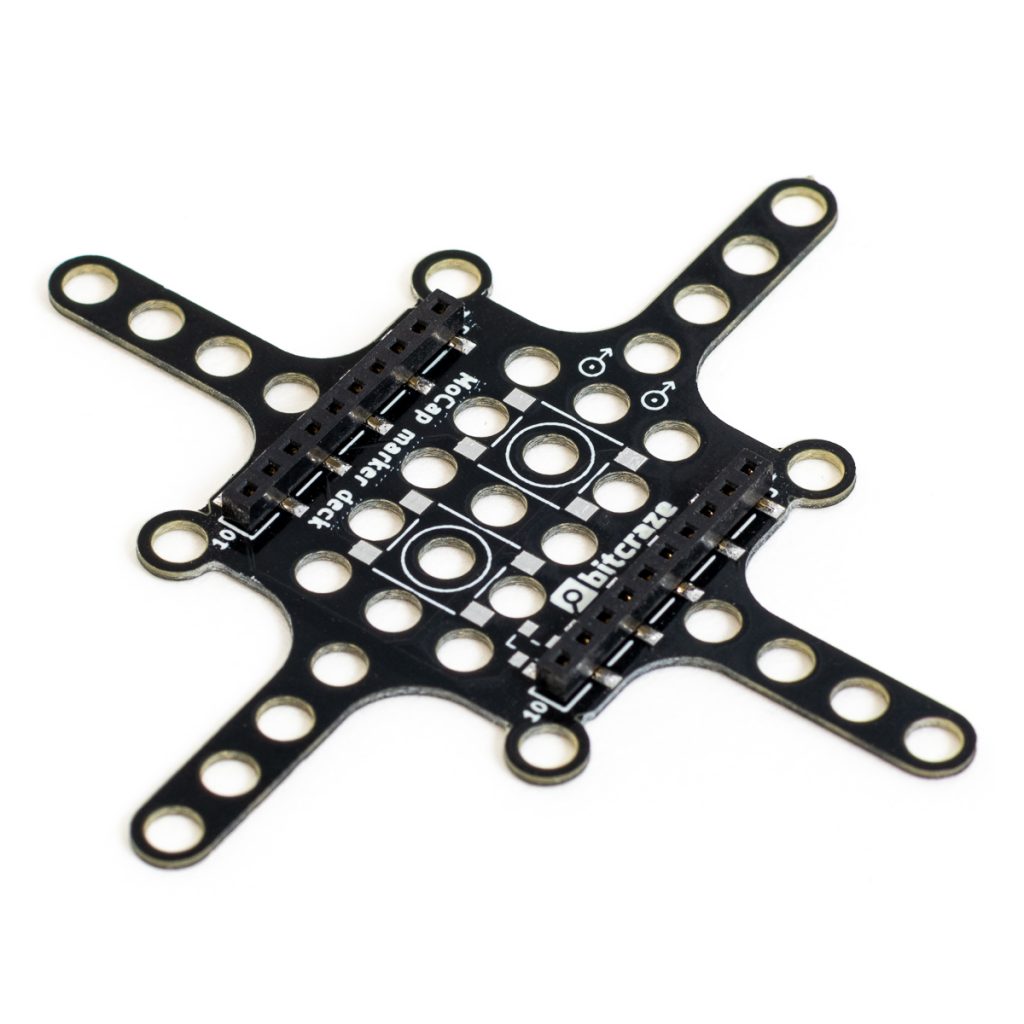
MoCap marker deck: The motion capture deck with support for easily attachment of passive markers for motion capture camera tracking.
Roadrunner: The Roadrunner is released as early access and the hardware is basically a Crazyflie 2.1 without motors and up to 12V input power. This enables other robots or system to use the loco positioning system.
You can find us in booth 101 at ICRA 2019 (in Montral, Canada), May 20 – 22. Drop by and say hi, check out the products & demo and tell us what you are working on. We love to hear about all the interesting projects that are going on. See you there!
As part of our collaboration with Qualisys we are helping them developing an active marker deck for their motion capture cameras. One of the major benefits with an active marker deck is that it can have an ID, thus it is much easier to track each Crazyflie in e.g. a swarm. Another benefit is an increased range compared to passive markers thanks to high power emitting IR LEDs.
Active marker deck mounted on a Crazyflie
We are currently only in the prototype stage but we have already managed to do initial fight tests so hopefully we can release it within a couple of months.
We will bring some prototypes to ICRA 2019, come and visit us and Qualisys to check the deck out.
As we have written about before we moved to a new office last month. One of the major reasons was the need for a bigger flight lab. This will enable us to do better testing and improve how we can develop things, especially our positioning solutions. Even though it is not a huge place, going from 4x4x3m to 8x8x3.5m and possibly 13x9x3.5m, is a great improvement for us. We call this great playground for the Arena as this is what it feels like for us :-). Very soon we hope to have our Qualisys MoCap system, Lighthouse and the Loco positioning running, maybe even at the same time.
The Arena
As a bonus this is a great pace to play HTC Vive VR games, we just need to get the wireless transmitter so we can make full use of the space!
Today we received a bunch of MoCap marker decks which means they are now available in our shop. This is a handy deck for those that flies in a motion capture system as it is easy to create different configurations and move between Crazyflies.
The deck is designed in collaboration with Qualisys. We suggest using 6.5mm, 8mm or 9.5mm diameter reflective motion capture markers. Currently we don’t offer the markers but soon we will also offer a bundle together with markers.