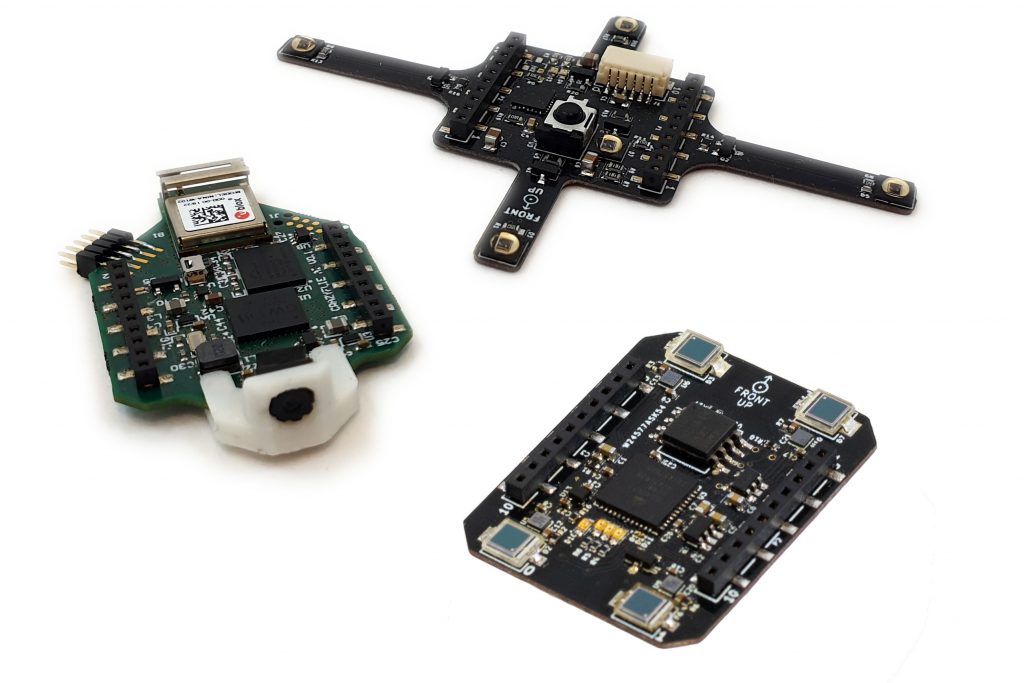
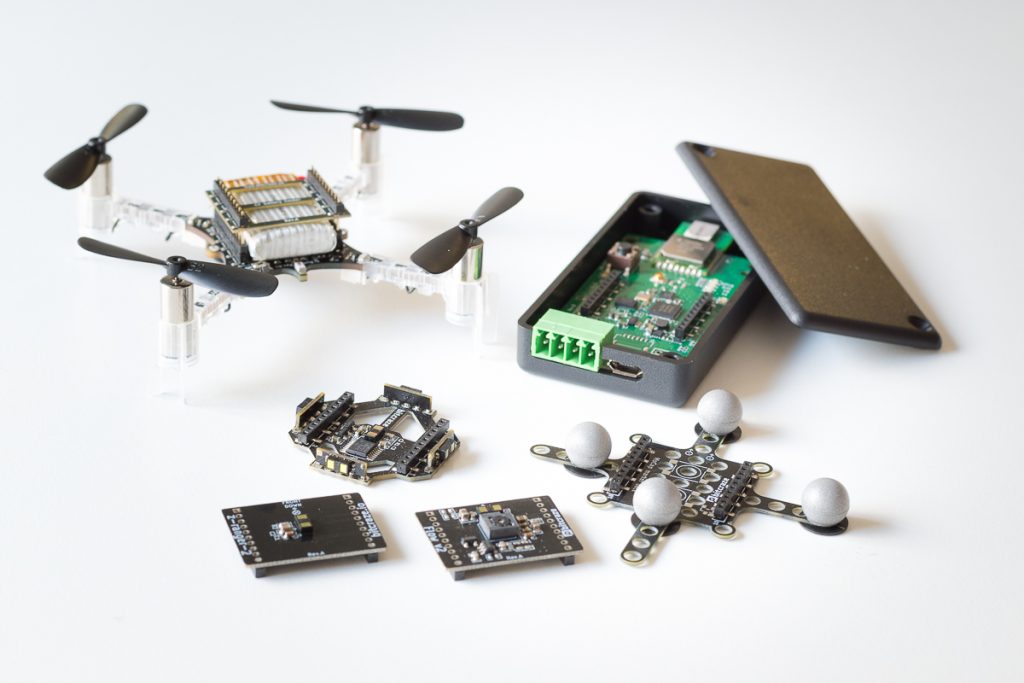
This week we are exhibiting at IROS in Macau. We are running our fully autonomous demo based on the Lighthouse positioning technology and charging pads. We also have brought some prototypes to show, for instance the Crazyflie Bolt, the AI deck and the Active marker deck. You can read more about the demo at the IROS 2019 page.
We’d love to hear what you are working on, discuss issues, possibilities or new products. If you are at IROS, drop by our booth (B34) and say hi!
Lighthouse yaw
We have not only prepared for IROS, we have also been working on improving the lighthouse positioning system. Recently we added a (slightly hackish) solution for updating the yaw with data from the Lighthouse deck. This means that it is not necessary to start the Crazyflie facing the positive X direction when using the Lighthouse deck. The Crazyflie will understand its heading and act accordingly.
Two Crazyflies facing a random direction, take off and rotate to yaw=0.
We are also working on integrating the Lighthouse deck in a better way in the kalman filter. If everything goes according to plan, it will enable a Crazyflie to fly with only one base station, and be more robust when using two base stations.
The Crazyflie Bolt and the Crazyflie 2.1 with the lighthouse deck are coming to Madrid!
Only one week away until the start of the big Bitcraze Conference frenzy, with the first stop… Madrid! We will visit the Micro Air Vehicle Competition and Conference, which is a robotics event that is more specialized in (as the name implies) MAVs! So it should be right up our alley. This is the first time that we attend as Bitcraze, although the writer of this blog post has experienced fun times at the conference and the competition as a participant with her previous lab, the MAVlab.
The IMAV has been around for almost 12 years, starting in Toulouse, France in 2007. Although it initially mostly was held in various places in Europe, in 2016 into a more worldwide phenomenon by making it’s tribute in Beijing, China and Melbourne, Australia in 2018. It hosts a conference to which researchers can send their work in anything related to MAVs, from autonomous navigation, state estimation and design.
IMAV is mostly know for hosting big indoor and outdoor competitions for MAVs. The outdoor competitions can range from survey tasks to finding a hidden person or object. This year the focus will be on the delivery of packages from one place to another. The judges will look at how many packages that can be safely delivered and if the drone is able to detect certain objects in the outdoor environment. The indoor competition is oriented around the application of MAVs in a warehouse. They should be able to take off autonomously, monitor boxes in shelves and make an innovatory, and pickup packages to release them in their designated location. 40 teams of 28 universities will show their awesome implementation in these difficult tasks.
We will have a booth at the main company fair at the conference and indoor competition, and will also be present at the outdoor competition day as well. We will bring the lighthouse positioning system and show the awesome swarming demo we developed. Also we want to bring the new Crazyflie Bolt with us, which we are sure of that the regular IMAV crew will love. If you are at the IMAV between the 30th of September to the 4th of October, come by and say hello!
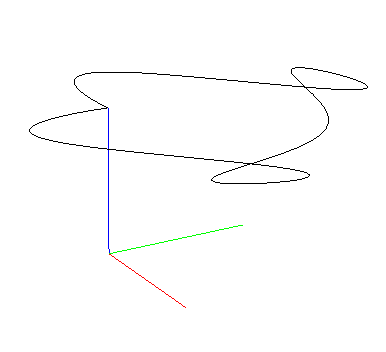
The High-level Commander has been part of the Crazyflie firmware since the 2018.10 release. In combination with a positioning system, it can fly the Crazyflie along a trajectory that is either defined in the firmware or uploaded through the python lib. It originates from the Crazyswarm project and we have used it in various demos since it is possible to make trajectories that are very fluid and looks really cool. The trajectories are defined as 7th degree polynomials describing segments executed one after each other.
The controller gives full control of position, velocity, acceleration and jerk, the only problem is that it is non-trivial to generate the polynomials. We have wanted to simplify the creation of trajectories for a long time and have finally had some time to play with it. In this blog post we will describe how it can be done with Bezier curves and show some examples.
Each segment in a High-level commander trajectory is defined by four 7 degree polynomials, one for x, y, z and yaw. There is also a scaling parameter that tells the controller the time scale to use when executing the segment. Using polynomials of degree 7 makes it possible to design trajectories that are continuous in position, velocity, acceleration and jerk when changing from one segment to the next, which is important to get a smooth and controlled flight.
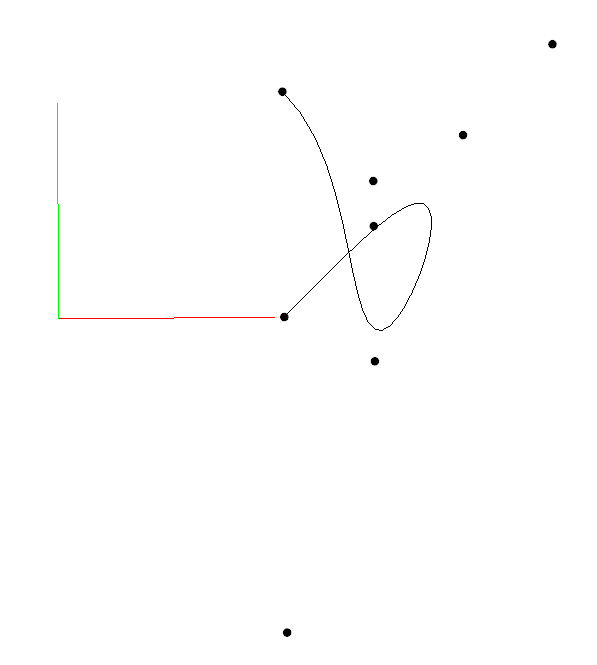
Bezier curves are common in many graphics applications and are probably known to most users. They are parametric curves defined by control points, usually three or four. Bezier curves can also be expressed as a polynomial, and this is what we will use in this case. To get a correct mapping to the desired polynomials we need some more control points and will use 8 per segment. The basic idea is to define the trajectory as Bezier curves and make sure the control points are placed in such a way that the continuity requirements are satisfied.
Bezier curve with 8 control points
On this page from University of Cambridge, there is a good explanation on continuity across the joins between curves and formulas for c0, c1 and c2 continuity. We also need c3 continuity which can be calculated in the same manner
With these formulas it is possible to set the handles of the Bezier curves to make sure we get a smooth ride.
We have added a python example that implements the ideas above. You can find it in crazyflie-lib-python/examples/positioning/bezier_trajectory.py. The design is based on Nodes that represents the connection points between bezier curves (called Segments). The Nodes has a set of handles that are shared between the Segments that use the Node. If not all handles are set the implementation will set them to appropriate values, see the comments in the code for more details. The Node API only allows the user to set handles on one of the Segments, the handles for the other segment are automatically set to generate a continuous trajectory.
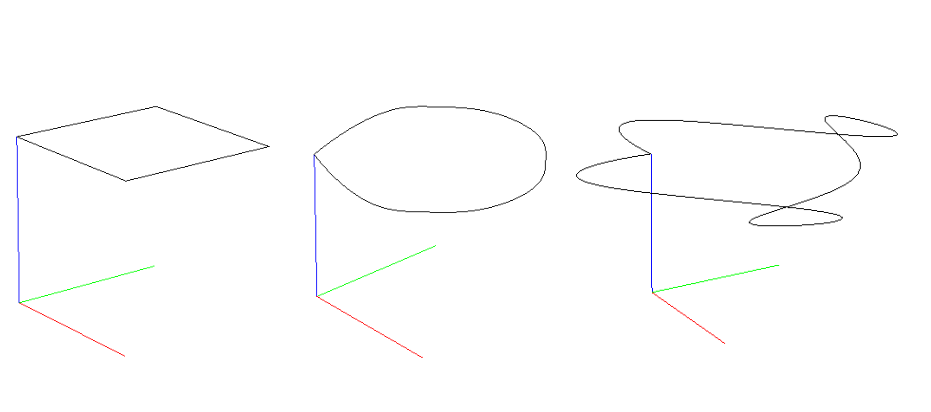
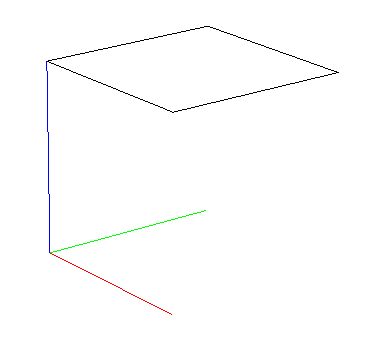
The example uses nodes in the corners of a square and contains three parts:
No velocity in the nodes. The Crazyflie stops in the Nodes. Similar to calling go-to in the HL commander.
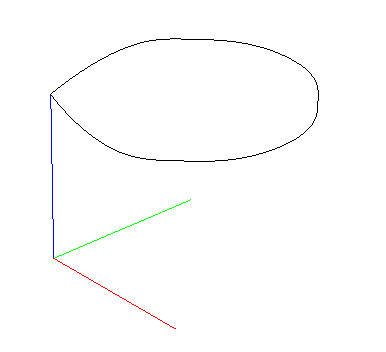
Velocity in the nodes. A fluid motion all the way around.
Velocity in the nodes. A fluid motion all the way around.
A bit more aggressive settings to get a little action.
Finally a video showing the full sequence, we use the Lighthouse for positioning.
Two weeks ago we posted about the demo we did for our new office move-in party. There has been multiple requests to share the script but unfortunately this is a hacked old script that is not going to be useful at all as an example. So, last week, we made an example that could run a synchronized swarm sequence.
The example has been pushed in the example folder of the Crazyflie-lib-python project. It is called synchronizedSequence.py. Running this example unmodified with 3 Crazyflies in a positioning system will give you this result. (Like the previous demo, this was done in a lighthouse system.)
One of the key design of the example is that it is based on a single control loop that can be synchronized with an outside system: in this example, there is a simple sleep of one seconds between each step of the sequence but it could for example be changed into a midi clock receiver to synchronize the sequence with music.
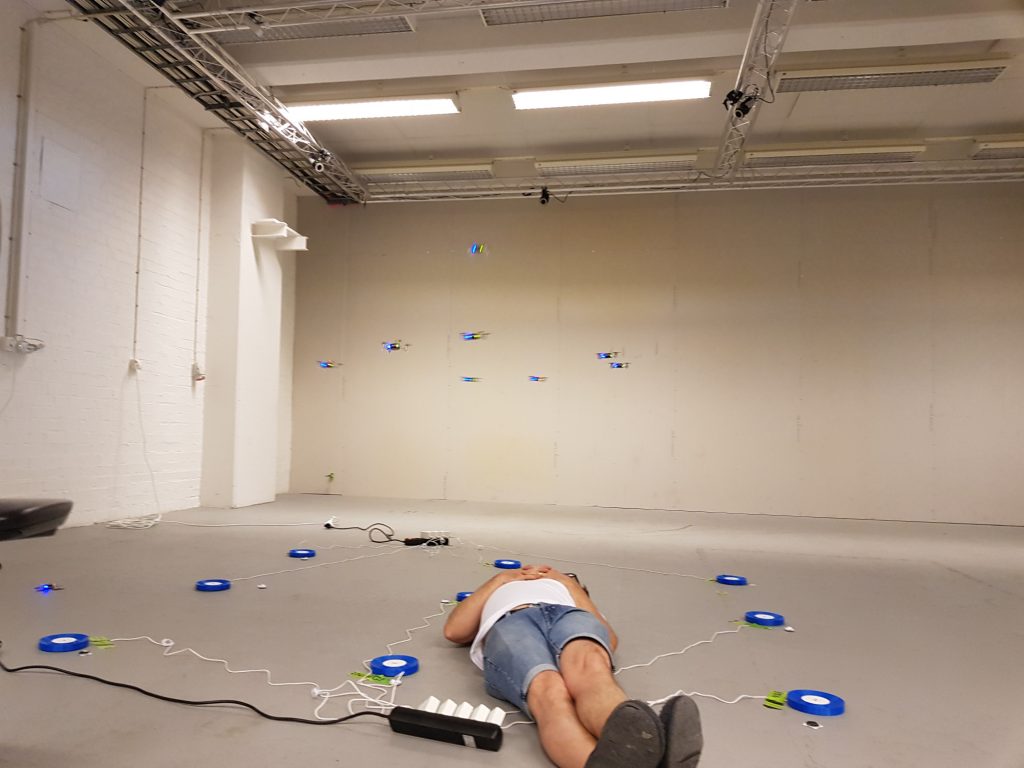
The example was developed with the help of Victor, a student we have hired to help-out during the summer. He has then played around a little bit to make a 9 Crazyflies sequence that is more impressive:
I uploaded Victor’s sequence in a github gist as it can be good for inspiration. One bit of warning though: as is, the sequence contains some vertical movements that are quite aggressive and the part where Crazyflies fly directly on top of each-other is more to be considered as a stress test.
Summer is here and temperatures are rising. Since many of us will be on holidays, we will focus this quarter on a special summer clean up! See here what we are working on:
Fixing issues: This time we are aiming to close many of the issue tickets in our Github repositories, so that after the summer everything will run much more smoothly (we hope!). Definitely our test rig will come in very hand to sniff out more issues in terms of radio communication as well. You can help as well! Everybody who is using and developing on with the STM-firmware,NRF-firmware or python library, or anything else and is noticing issues, please make a ticket in that same Github repository (if you are familiar with the code) or post about it on our forum (if you do not know exactly what is going on). Together we can make the code better.
Lighthouse calibration: In March we released our lighthouse deck for positioning with the HTC Vive base stations. We did feel that the setup process could be improved further, since currently, the Crazyflies’ firmware must contain hardcoded information of the Steam VR’s base station position. We will try to apply the factory calibration direct from the Base stations itself. This will enable us to do 2 additional things: (1) The Crazyflie with the LH deck itself could be used to setup the Lighthouse system, so that SteamVR would not be necessary anymore. (2) Only 1 base station is needed for positioning instead of 2, which will improve the robustness in case of loss of visual-line-of-sight of one base station.
Documentation: We try to provide all the possible information for everybody to be able do anything they want with their Crazyflie. But with high flexibility comes great responsibility…. for proper documentation! We are planning to restructure all of our media outlets and try to improve the flow and level of detail for our users. We hope to make it easier for beginning developers to get started and more advanced developers to gain better understanding of the system in order to implement their own awesome ideas. So our very first step is to restructure and clean up the Bitcraze wiki and see where we can add more content.
Products: We have a lot of products coming out in the 2nd half of the year
AI Deck: We are working hard to get the AI deck all ready for production and we are estimating that they will be available for early access in late autumn. Keep a look out on our forum for regular updates on the progress!
Lighthouse breakout board: We made our first working prototype of the lighthouse breakout board, which should make it easier for the lighthouse positioning system to also work on other platforms than the Crazyflie.
Active Marker Deck: We are very much on on track with the Qualisys active marker deck! It should be available in the Autumn.
Crazyflie Bolt: This has been send off to production for the early access version, which should be available in the Autumn!
We have recently moved to a new bigger office. With the summer arriving in Sweden, it was time to organize a small move-in after-work party with friends and family. For the occasion we wanted to play around with a small swarm of Crazyflies and the new Lighthouse positioning. Time being a sparse resource, we setup the ICRA2019 demo in the flight lab so that we would be able to fly during the party. We also started looking at our old swarm show that we ran with the LPS a year ago to see if we could run it with Lighthouse:
The show was a essentially a sequence of setpoints sent from a python script and controlling 9 Crazyflies 2.1 equipped with Lighthouse deck on the top and led-ring deck on the bottom synchronized on music. We setup the Crazyflie in the Lighthouse positioning system and converted the script to use the high-level-commander GOTO setpoints. We look forward at trying more advance control problems like trajectories to make more impressive synchronized flight choreography in the future but for now it already look quite good even with only GOTOs:
3 of us where at ICRA 2019 in Montreal last week, where we met a lot of interesting people and a lot of Crazyflie users. Thanks a lot to everyone that drop by our booth, and for the ones that missed it we are planning on being at iROS2019 later this year so we might see you there :-).
We have already described our demo in a previous post, now that we run it we can update on how it went. We are also updating the ICRA2019 page with the latest source code and information so that anyone interested can reproduce the demo.
In its final state at the conference, the demo contained 8 Crazyflies 2.1 equiped with Lighthouse deck and Qi charger deck. There were 8 3D-printed charging pads on the floor with Ikea Qi wireless chargers and two HTC Vive base stations (V1) on tripods. The full system was contained in a cage, built from 50 cm-long tubes or aluminium and nets.
The full setup of the booth took us about 4 hours, this included about 3 hours for the cage, 15 min for the demo including calibration of the lighthouse base-station geometry and the rest to fine-tune things. This is by far our best setup time, we still need to prettify the cage a bit and to make is easier to install, but we will most likely re-use this system for upcoming conferences.
In this demo we aimed at keeping a Crazyflie in the air at every moment, to do so we had a computer connected to all 8 Crazyflies sending to one of them the signal to start flying if no other where actually in the air flying a trajectory. The flight was completly autonomous as we explained in our previous blog post. We setup the Crazyflie to fly 2 cycles and then land, which increase the rate of swap and so increased the ‘action’, though it also meant that during the swap two Crazyflies where flying. This drained the batteries a bit more than expected and meant that after about an hour all the Crazyflies where bellow the take-off threshold and we had to wait ~30 seconds between flights. Here is a video of it in action:
The demo was very care-free, we had very few Crashes and we mostly restarted the Crazyflies to swap batteries manually to add a bit of power in the swarm. The last day we decided to spice it up a little bit by adding a chair in the cage and by calibrating the chair position and flight trajectory, we managed to have the Crazyflie partly fly under it. This worked quite well most of the time and showed that the lighthouse positioning is repeatable and works fairly well with short occlusion in the path. Though we also found out that even though a single Crazyflie would always fly the same trajectory, two different Crazyflies will not. We think differences in propeller stiffness and the fact that the our Mellinger position controller has not been calibrated for changing YAW are the main reasons.
If you want to know more about the demo or if you want to reproduce it do not hesitate to visit the ICRA 2019 page that explains it in more details and links to the source code of everything including 3D printed parts for the cage and the landing pads.
Only a week left until we stand in our ICRA booth in Montreal and give you a gimps of what we do here at Bitcraze. As we have been writing about earlier we are aiming to run a fully automated demo. We have been fine tuning it over the last couple of days and if something unpredictable doesn’t break it, we think it is going to be very enjoyable. For those that are interested in the juicy details check out this informative ICRA 2019 page, but if you are going to visit, maybe wait a bit so you don’t get spoiled.
Apart from the demo we are also going to show our products as well as some new things we are working on. The brand new things include:
AI-deck, Active marker deck and Lighthouse-4 deck
AI-deck: This is a collaborative product between GreenWaves Technologies, ETH Zurich and Bitcraze. It is based on the PULP-shield that the Integrated and System Laboratory has designed. You can read more about it in this blog post. The difference with the PULP-shield is that we have added a ESP32, the NINA-W102 module, so that video can be streamed over WiFi. This we hope will ease development and add more use cases.
Active marker deck: Another collaboration, but this time with Qualisys. This will make tracking with their motion capture cameras easier and better. Some more details in this blog post. Qualisys will have the booth just next to us were it will be possible to see it in a live demo!
Lighthouse-4 deck: Using the Vive lighthouse positioning system this deck adds sub-millimeter precision to the Crazyflie. This is the deck used in the demo and could become the star of the show.
Adding to the above we will of course also display our recently released products:
Crazyflie 2.1: The Crazyflie 2.1 is an improvement of the Crazyflie 2.0 but keeping backward capability.
Better radio performance and external antenna support: With a new radio power amplifier we’ve improved the link quality and added support for dual antennas (on-board chip antenna and external antenna via u.FL connector)
Better power button: We’ve gotten feedback that the power button breaks too easily, so now we’ve replaced with a more solid alternative.
Improved battery cable fastening: To avoid weakening of the cables over time they are now run through a cable relief.
Improved sensors: To make the flight performance better we’ve switched out the IMU and pressure sensor. The new Crazyflie uses the drone specialized sensor combo BMI088 and BMP388 by Bosch Sensortech.
Flow deck v2: The Flow deck v2 has been upgraded with the new ST VL53L1x which increases the range up to 4 meters
Z-ranger deck v2: The Z-ranger v2 deck has been upgraded with the new ST VL53L1x which increases the range up to 4 meters
Multi-ranger deck: The Multi-ranger deck adds VL53L1x sensors in all directions for mapping and obstacle avoidance.
MoCap marker deck: The motion capture deck with support for easily attachment of passive markers for motion capture camera tracking.
Roadrunner: The Roadrunner is released as early access and the hardware is basically a Crazyflie 2.1 without motors and up to 12V input power. This enables other robots or system to use the loco positioning system.
You can find us in booth 101 at ICRA 2019 (in Montral, Canada), May 20 – 22. Drop by and say hi, check out the products & demo and tell us what you are working on. We love to hear about all the interesting projects that are going on. See you there!
One Crazyflie flying and 5 re-charging on their pads
Running a demo with flying Crazyflies at a conference, usually means a lot of work with changing and charging batteries, starting demos and so on. This takes time and leads to less time to talk to all the interesting people that visit our booth. This year we are aiming at making the demo as fully automated as possible. We will have 8 Crazyflie 2.1 with Lighthouse and Qi charger decks, each with a charging pad. A computer will orchestrate the Crazyflies and make sure one is flying at all times while the others re-charge their batteries. When the battery of the flying Crazyflie is depleted it goes back to its pad while another one takes over.
Most of the functionality is implemented in the Crazyflie firmware and it is pretty much autonomous after the trajectory is started. It will fly the trajectory over and over until it is low on battery, when it goes back to where it started from for recharging. Even though the Lighthouse positioning is very good, it sometimes slips off the charging pad when landing, so we have added a reposition feature to take off again and land if it is not charging after landing.
The orchestration computer (we call it the Control tower) is just keeping track of the state of the flying copter and starts a new one when the flying one goes back the the pad.
We are reusing the spiral trajectory from IROS last year and it has the property that it is possible to run up to 4 copters at the same time without colliding, if they are started at the correct times. There is a swarm feature in the Control tower that runs up to 4 Crazyflies with continuous replacements. The chargers are not fast enough to keep it going and it does not work as expected every time, but it is exciting with a few more Crazyflies buzzing around!
You can find us in booth 101 at ICRA 2019, May 20 – 22. Drop by and say hi, check out the demo and tell us what you are working on. We love to hear about all the interesting projects that are going on. See you there!
We attended the Innovation Week at Lund University on Thursday last week. Primarily we wanted to talk to students and possibly find future colleagues (yes, we are hiring) but it was also a good opportunity to get some demo time with the Lighthouse positioning system.
The demo setup. A bit blurry, sorry!
As mentioned in an earlier blog post, we are going to ICRA in May and we have started to think about what to demo. The main feature will of course be the Lighthouse deck. The setup at Innovation week also served the purpose of a first iteration for the ICRA setup.
We reused an old cage that we created for another fair a couple of years ago, built from a garden tent. It turned out to be fairly wobbly and a bit heavy (steel tubing) considering we will bring it in our luggage to Canada. We probably have to rethink the construction a bit and see if we can change to aluminium.
We put the Lighthouse base stations on tripods, which worked like a charm in our flight lab. We found that we had a lot of problems calibrating the system, not to mention flying the Crazyflie, at the Innovation week fair though. It turned out that the floor was not as stable as one might expect and that the tripods were swaying when people walked by. We solved the problem by adding a tube to the top of tripod that was pushed against the ceiling and thus minimizing the movement. Experience from the real world is always useful!
The general idea for the demo at ICRA is to automate as much as possible to give us more time with visitors. With the high precision of the Lighthouse system, it should be easy to land the Crazyflies on Qi chargers to avoid changing batteries. We hope to set up 6-8 Crazyflies where one is always flying while the others are charging, and have the possibility to temporarily fly more Crazyflies for small swarms. It is still just ideas and we will not see the end result until we are at ICRA, but it will be fun to build!