The main feature in this release is the stabilization of the Lighthouse positioning system. The main work done has been on the system setup and management, it has taken a lot of work spawning all the projects and a brunch of documentation, but we think we have reached a stage where the lighthouse positioning system is working very well and is very easy to setup and get working. We have now published the new Lighthouse getting started guide and will be working this week at updating all required materials to mark Lighthouse as released!
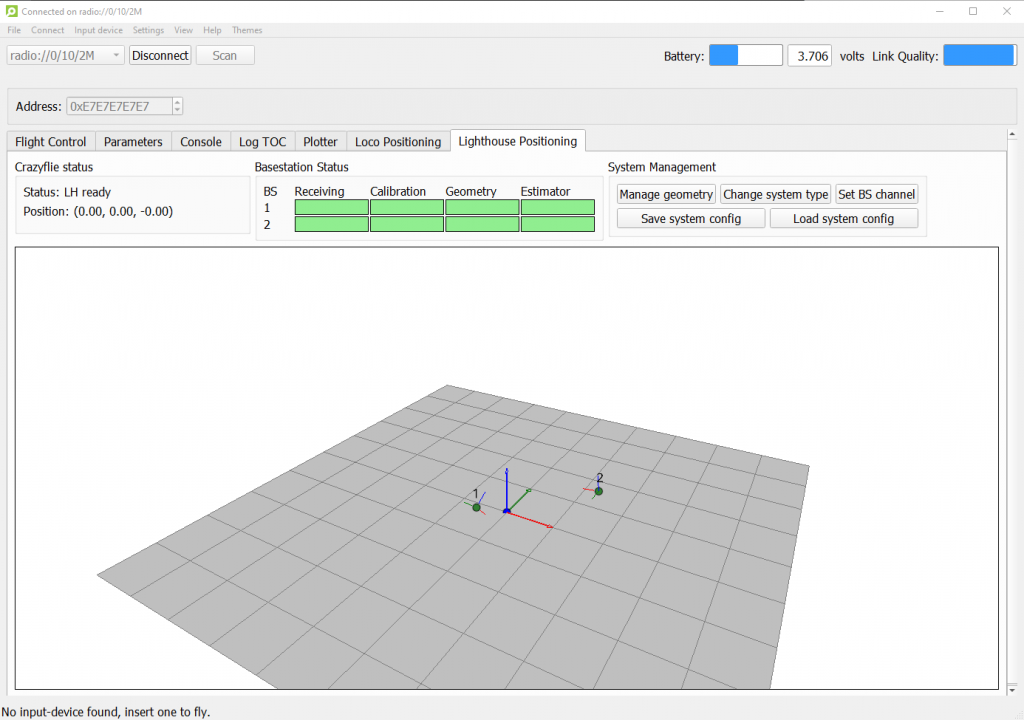
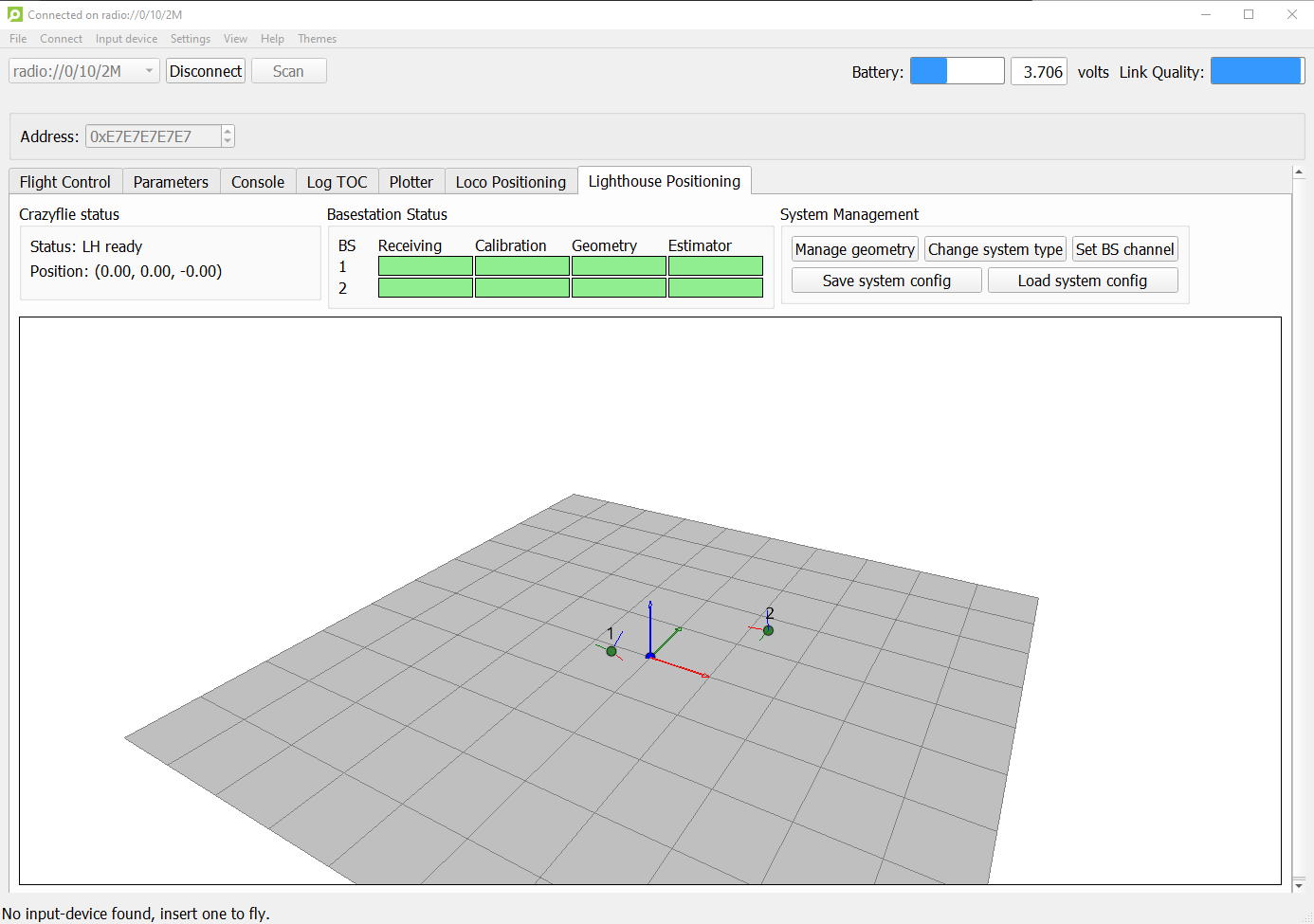
When the Lighthouse positioning system was released in early access, it required to install SteamVR, run some custom scripts and flash a modified firmware to get up and running. This has been improved slightly over time with scripts that allows to setup the system without using SteamVR and some way to store the required system data in the Crazyflie configuration memory rather than hard-coded in the firmware. With this release, everything is coming together and it is now possible to go from zero to an autonomous Crazyflie flying in a lighthouse system in minutes by just using the Crazyflie client.
Lighthouse positioning setup and management tab in the Crazyflie client
Another major improvement made to support the lighthouse is the modification of the bootloader Crazyflie update sequence in the client as well as in command line. The new sequence will restart the Crazyflie a couple of times while upgrading the Crazyflie, this allows for an upgrade of the firmware in the installed decks if required. The lighthouse deck firmware has been added to the Crazyflie .zip release file and will be flashed into the deck while flashing the release to a Crazyflie that has the deck installed.
An alternative, robust TDoA implementation has been added for the Loco Positioning System. This change has been contributed by williamwenda on Github and can optionally be enabled at runtime.
An event subsystem has also been added to the firmware. It allows to log events onto the SD-Card which can be very useful when acquiring positioning data from the various positioning system supported by the Crazyflie. We have described this subsystem in an earlier blog post.
There has also been a lot of smaller improvement and bugfixes in this release. See the individual project releases not for more information.
We hope you are going to enjoy this new Crazyflie and lighthouse release. Do not hesitate to drop a comment here, questions on the forum if you have any or bug reports of github in the (very unlikely ;-) event that there are bugs left.
One crucial aspect of any research and development is to record and analyze data, which then can be used for quantifying performance, debugging strange behavior, or guide us in our decision making. We have been trying to improve the way that this is done to help all of you researcher out there with their work, so this blog post will explain an alternative, better, method to record whatever is happening on the Crazyflie in real-time.
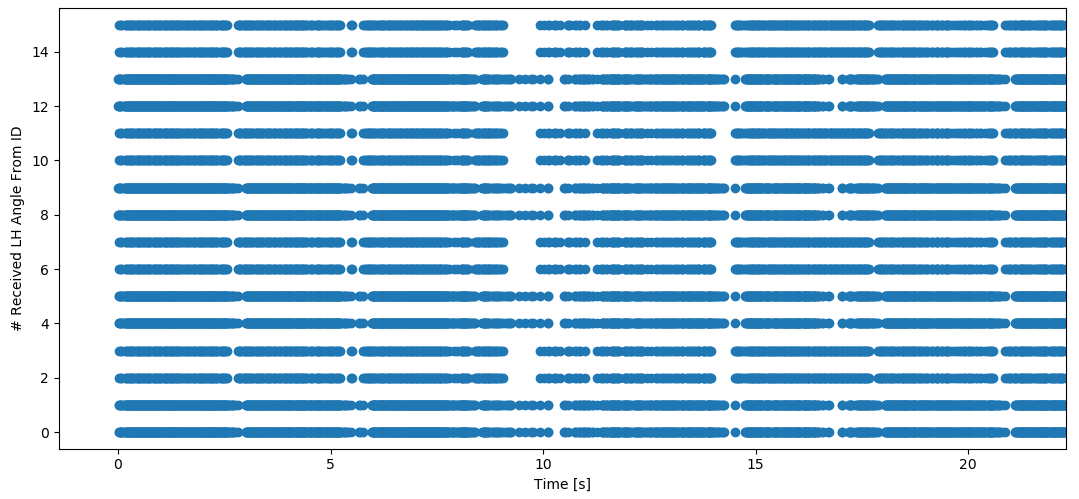
Example data collection of received Lighthouse angles over time. The y-axis contains a unique measurement ID (16 in total for 4 sensors * 2 basestations * 2 sweeps/basestation). Thus, each dot represents the time when a certain kind of measurement was received. We do not receive all angles in fixed intervals, because of the interference between basestations.
Existing Logging Approaches
So far there have been two principle ways of recording data with the Crazyflie:
Logging: In the firmware, one can define global variables that can be streamed out at a fixed frequency, using logging configurations. Variables have a name and data type, and the list of all available variables can be queried from the firmware.
Debug Prints: It is possible to add DEBUG_PRINT(…) in any place that contains a string and possibly some variables. These are asynchronous, but not timestamped, so they are mostly useful to notify the user of some status change.
Both approaches have multiple backends. The logging variables can be streamed over USB, via the Crazyradio, or on a Micro-SD-card using a specialized deck. When using the radio or USB, the frequency is limited to 100 Hz and only a few variables can be streamed at this speed due to bandwidth limitations. The Micro-SD-card deck, on the other hand, allows to log a lot more logging variables at speeds up to 1 kHz, making it possible to access high-speed sensor information, e.g., the IMU data. The Debug Prints can be used over the radio or USB, or with a SEGGER J-Link and a Debug Adapter, over J-Link Real-Time Transfer (RTT). The former is very bandwidth limited, while the latter requires a physical wire connection, making it impossible to use while flying.
New Approach: Event-Based Logging
Event-based logging combines the advantages of the existing approaches and offers a third alternative to record data. Similar to debug prints, a user can trigger an event anywhere in the code and include some mandatory variables that describe this event (so-called payload). Similar to logging, these events are timestamped and have fewer bandwidth limitations. Currently, there is just one backend for the Micro-SD-card deck, but it would be possible to add support for radio and USB as well.
One of our first test cases of the event-based logging is to analyze the data we get from the Lighthouse deck. Here, we trigger an event whenever we received a raw sweep. This allows us to visually see the interference that happens between two LH2 basestations. We also use the event-based logging for time synchronization of the Crazyflie and a motion capture system: when we enable the IR LEDs on the active marker deck, we record an event that contains the Crazyflie timestamp. On the PC side, we record a PC timestamp when the motion capture system first detects the IR LEDs. Clock drifts can be computed by using the same logging mechanism when the IR LEDs are turned off.
Adding event-based logging had some other good side effects as well: the logging is now generally much faster, there is more user feedback about the correct buffer size usage, and the binary files are smaller. More details are in the documentation.
Future Work
We are working on adding event triggers to the state estimator. This will enable us to record all the sensor information during real flights with different positioning systems, so that we can tune and improve the Kalman state estimator. It will also be interesting to add support for events in CRTP, so that it can be used over USB and radio.
Most of the improvements have been done in the Crazyflie firmware and include:
The App API in the Crazyflie firmware has been extended and improved to be able to handle a wider range of applications. The goal is to enable a majority of users to implement the functionality they need in an app instead of hacking into the firmware it self.
We have improved the Lighthouse support in the firmware and both V1 and V2 are now working well. Even-though everything is not finished yet, we have taken a good step towards official Lighthouse positioning.
A collision avoidance module has kindly been contributed by the Crazyswarm team.
A persistant storage module has been added to enable data to be persisted and available after the Crazyflie is power cycled. It will initially be used to store Lighthouse system information, but will be useful for many other tasks in the future.
Basic arming functionality has been added for platforms using brushless motors.
In the client the LPS tab now has a 3D visualization of the positioning system and a new tab has been added to show the python log output.
Unfortunately we have run into some problems for the Windows client build which is not available for this release.
Finally we have fixed bugs and worked to improve the general stability.
Storage is one of these very simple functionality that actually ends up being quite hard to implement properly. It is also one of these functionality that is never acutely needed, it is possible to hack around it, so it gets pushed to be implemented later. Later is now, we have now implemented a generic persistent storage subsystem in the Crazyflie.
In Crazyflie 1.0, we originally stored settings in a setting block in flash and required the bootloader to change the settings. When designing Crazyflie 2.0 we added an I2C EEPROM to make it easier to store settings, though until now we only stored a fix config block very similar to the one stored in the Crazyflie 1 and that only contained basic radio settings and tuning. This implementation is hard to evolve since the data structure is fixed in one point of the code.
What is now implemented is a generic key-buffer database stored in the I2C EEPROM. From the API user point of view, it is now possible to store, retrieve and delete a buffer using a string as a key. This allows any subsystem, or apps, in the Crazyflie to easily store and retrieve their own config blocks. There is 7KB of space available for storage in the EEPROM.
The first user of this new storage subsystem is the Lighthouse driver. The storage is used to store lighthouse basestation geometries and calibration data, this allows to configure a Crazyflie for a system/lab and have it running out of the box even after a restart.
A future use-case would be to implement stored-parameters: we have been thinking about implementing optional persistence for the parameters for a long time. This would allow to modify and then store new default values for any parameters already present in the Crazyflie. This would allow to very easily implement things like custom controller tuning in a quad made from a bolt for example.
At low level, we where hopping to be able to find a ready-to-use library or file system to store data in our small EEPROM, but unfortunately we did not find anything that would fit our needs. We then had to implement our own storage format.
The low level structure is documented in the Crazyflie firmware repos. Basically the data are stored as a table of “length-key-value” entries with a possibility for an entry to he a “hole”. When new buffers are added they are added at the end of the table and when they are deleted they are replaced by a hole. When the end of the table is reached, the table is de-fragmented by removing the holes and moving the data as much as possible to the beginning of the memory. This structure works very well for an EEPROM and could even be adapted to work well on FLASH.
New CI
When we started activating continuous integration/automatic build to our GitHub repos we did so using Travis CI for firmware builds and AppVeyor for windows builds. However, the GitHub CI offering, GitHub actions, has become quite complete lately and now supports Linux, Windows as well as MacOS builds.
We have now transitioned to GitHub actions for all our repos and we will also implement most of the release process using GitHub actions as well. This will hopefully streamline the release process and allow us to release new version of our projects more often.
With the raging pandemic in the world, 2021 will most likely not be an ordinary year. Not that any year in the Bitcraze universe has been boring and without excitement so far, but it is unusually hard to make predictions about 2021. Any how, we will try to outline what we see in the crystal ball for the coming year.
Products
What products are cooking in the Bitcraze pot and what tasty new gadgets can we look forward to this year?
Lighthouse
We did hope that we would be able to release the first official version of the Lighthouse system in 2020, but unfortunately we did not make it. It has turned out to be more complex than anticipated but we do think we are fairly close now and that it will be finished soonish, including support for lighthouse V2.
Once the official version has been achieved, we are planning to assemble an full lighthouse bundle, which includes everything you need to start flying in the lighthouse positioning system. This will also include the Basestations V2 as developed by Valve corporation, so stay tuned!
New platforms and improvements
We released the AI-deck last year in early release, but the AIdeck will be soon upgraded with the latest version of the GAP8 chip. For most users this will not change much but for those that really push the deep learning to the edge will be quite happy with this improvement. More over, we are planning to by standard equipped the gray-scale camera instead of the RGB Bayer filter version, due to feedback of the community. We are still planning to offer the color camera on the side as a separate product for those that do value the color information for their application.
Also we noticed the released of several upgraded versions of sensors for the decks that we already are offering today. Pixart and ST have released a new TOF and motion sensor so we will start experimenting with those soon which hopefully lead to a new Multiranger or Flowdeck. Also we are aware of the new DWM3000 chip which would be a nice upgrade to the LPS system, so we will start exploring that as well, however we are not sure if we will be able to release the new version of LPS in 2021 already.
One of the field that we have wanted to improve for a while but have not gotten to so far is the communication with the Crazyflie. The Crazyradio is using a quite old chip and the communication protocol has hardly been touched in years. There now exists a much more powerful nRF52 radio chip with USB port so it can give us the opportunity to make a new Crazyradio and, at the same time, rework the communication protocols to make them more reliable, easier to use and to expand.
People and Collaborations
Last year we have started several collaborations with show drone orientated business, which we are definitely moving forward with in 2021. For shows stability and performance is very important so with the feedback of those that work with that on a regular basis will be crucial for the further development and reliability of our products.
Moreover we would like to continue our close collaboration with researchers at institutes and universities, to help them out with achieving their goals and contribute their work to our opensource firmware and software. Here we want to encourage the community to make their contributions easy to use by others, therefore increasing the reproducibility of the implementations, which is a crucial aspect of research. Also we are planning to have more of our online tutorial like the one we had in November.
We also will be working with closely together with one of our very active community members, Wolfgang Hönig! He has done a lot of great work for the Crazyswarm project from his time at University of Southern California (USC) and has spend the last few years at Caltech. He will be working together with us for a couple of months in the spring so we will be very happy to have him. Moreover, we will also have 2 master students from LTH working with us on the topic hardware simulation in the spring. We are making sure that we can all work together in the current situation, either sparsely at the office or fully online.
In 2021, we will also keep our eyes open for new potential Bitcrazers! We believe that everybody can add her/his own unique addition to the team and therefore it is important for us to keep growing and get new/fresh ideas or approaches to our problem. Usually we would meet new people at conferences but we will try new virtual ways to get to know our community and hopefully will meet somebody that can enhance our crazy group.
Working from home
Due to the pandemic we are currently mainly working from home and from the looks of it, this will continue a while. Even though we think we have managed to find a way to work remotely that is fairly efficient, it is still not at the same level as meeting in real-life, so there is always room for improvement. Further more the lack of access to electronics lab, flight lab and other facilities when working from home, does not speed work up. We will try to do our best though under the current circumstances and are looking forward to an awesome 2021!
It’s that time of the year again ! As the days get darker and darker here in Sweden, we’re happy to getting some time off to share some warmth with our families.
And to kick off the holiday season, we prepared a little treat for you ! We enjoyed making a Christmas video that tested how we could use the Crazyflie at home. Since we’re not at the office anymore, we decided to fly in our homes and this video shows the different ways to do so. First, take a look at what we’ve done:
Now let’s dig into the different techniques we used.
Tobias decided to fly the Bolt manually. His first choice was to land in the Christmas sock, but that was too hard, thereof the hard landing in top of the tree. We were not sure who would survive: the tree or the Bolt!
Kimberly installed two base stations V2’s and after setting up, determined some way points by holding the Crazyflie in her hand. Then she generated a trajectory with the uav_trajectories project (like in the hyper demo). Then she used the cflib to upload this trajectory and make the crazyflie fly all the way to the basket. Her two cats could have looked more impressed, though!
Using trials and errors, Barbara used the Flowdeck, the motion commander, and a broken measuring tape to calibrate the Crazyflie’s path next to the tree.
Arnaud realized that, with all the autonomous work, we hardly fly the Crazyflie manually anymore. So he flew the Crazyflie manually. It required a bit more training that expected, but Crazyflie is really a fun (and safe!) quad to fly.
Marcus used two Lighthouse V2 base stations together with the Lighthouse deck and LED-ring deck. For the flying, he used the high level commander. The original plan was to fly around his gingerbread house, but unfortunately it was demolished before he got the chance (by some hungry elves surely!)
Kristoffer made his own tree ornament with the drone, which turned out to be a nice addition to a Christmas tree !
It was a fun way to use our own product, and to show off our decorated houses.
I hope you enjoy watching this video as much as we enjoyed making it.
We are staying open during the Holiday season but on a limited capacity: we still ship your orders, and will keep an eye on our emails and the forum, but things will get a bit slower here.
We wish you happy holidays and safe moments together with your loved ones.
This autumn when we had our quarterly planing meeting, it was obvious that there would not be any conferences this year like other years. This meant we would not meet you, our users and hear about your interesting projects, but also that we would not be forced to create a demo. Sometimes we joke that we are working with Demo Driven Development and that is what is pushing us forward, even-though it is not completely true it is a strong driver. We decided to create a demo in our office and share it online instead, we hope you enjoy it!
The wish list for the demo was long but we decided that we wanted to use multiple positioning technologies, multiple platforms and multiple drones in a swarm. The idea was also to let the needs of the demo drive development of other technologies as well as stabilize existing functionality by “eating our own dogfood”. As a result of the work we have for instance:
improved the app layer in the Crazyflie
Lighthouse V2 support, including basic support for 2+ base stations
better support for mixed positioning systems
First of all, let’s check out the video
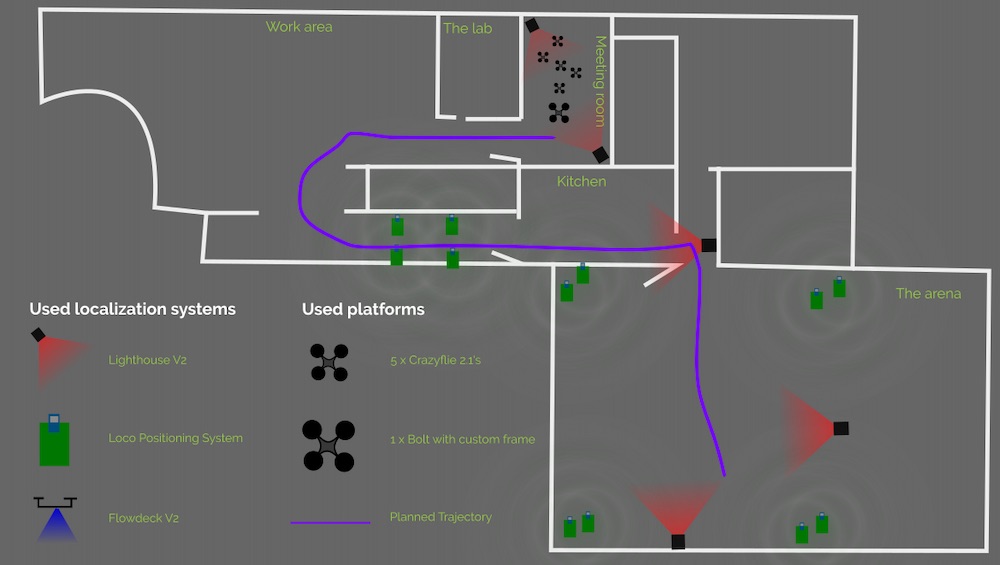
We are using our office for the demo and the Crazyflies are essentially flying a fixed trajectory from our meeting room, through the office and kitchen to finally land in the Arena. The Crazyflies are autonomous from the moment they take off and there is no communication with any external computer after that, all positioning is done on-board.
Implementation
The demo is mainly implemented in the Crazyflie as an app with a simple python script on an external machine to start it all. The app is identical in all the Crazyflies so the script tells them where to land and checks that all Crazyflies has found their position before they are started. Finally it tells them to take off one by one with a fixed delay in-between.
The Crazyflie app
When the Crazyflie boots up, the app is started and the first thing it does is to prepare by defining a trajectory in the High Level Commander as well as setting data for the Lighthouse base stations in the system. The app uses a couple of parameters for communication and at this point it is waiting for one of the parameters to be set by the python script.
When the parameter is set, the app uses the High Level Commander to take off and fly to the start point of the trajectory. At the starting point, it kicks off the trajectory and while the High Level Commander handles the flying, the app goes to sleep. When reaching the end of the trajectory, the app once more goes into action and directs the Crazyflie to land at a position set through parameters during the initialization phase.
We used a feature of the High Level Commander that is maybe not that well known but can be very useful to make the motion fluid. When the High Level Commander does a go_to for instance, it plans a trajectory from its current position/velocity/acceleration to the target position in one smooth motion. This can be used when transitioning from a go_to into a trajectory (or from go_to to go_to) by starting the trajectory a little bit too early and thus never stop at the end of the go_to, but “slide” directly into the trajectory. The same technique is used at the end of the trajectory to get out of the way faster to avoid being hit by the next Crazyflie in the swarm.
The trajectory
The main part of the flight is one trajectory handled by the High Level Commander. It is generated using the uav_trajectories project from whoenig. We defined a number of points we wanted the trajectory to pass through and the software generates a list of polynomials that can be used by the High Level Commander. The generated trajectory is passing through the points but as a part of the optimization process it also chooses some (unexpected) curves, but that could be fixed with some tweaking.
The trajectory is defined using absolute positions in a global coordinate system that spans the office.
Positioning
We used three different positioning systems for the demo: the Lighthouse (V2), the Loco Positioning system (TDoA3) and the Flow deck. Different areas of the flight space is covered by different system, either individually or overlapping. All decks are active all the time and pick up data when it is available, pushing it into the extended Kalman estimator.
In the meeting room, where we started, we used two Lighthouse V2 base stations which gave us a very precise position estimate (including yaw) and a good start. When the Crazyflies moved out into the office, they only relied on the Flowdeck and that worked fine even-though the errors potentially builds up over time.
When the Crazyflies turned around the corner into the hallway towards the kitchen, we saw that the errors some times were too large, either the position or yaw was off which caused the Crazyflies to hit a wall. To fix that, we added 4 LPS nodes in the hallway and this solved the problem. Note that all the 4 anchors are on the ground and that it is not enough to give the Crazyflie a good 3D position, but the distance sensor on the Flow deck provides Z-information and the overall result is good.
The corner when going from the kitchen into the Arena is pretty tight and again the build up of errors made it problematic to rely on the Flow deck only, so we added a lighthouse base station for extra help.
Finally, in the first part of the Arena, the LPS system has full 3D coverage and together with the Flow deck it is smooth sailing. About half way the Crazyflies started to pick up the Lighthouse system as well and we are now using data from all three systems at the same time.
Obviously we were using more than 2 basestations with the Lighthouse system and even though it is not officially supported, it worked with some care and manual labor. The geometry data was for instance manually tweaked to fit the global coordinate system.
The wall between the kitchen and the Arena is very thick and it is unlikely that UWB can go through it, but we still got LPS data from the Arena anchors occasionally. Our interpretation is that it must have been packets bouncing on the walls into the kitchen. The stray packets were picked up by the Crazyflies but since the Lighthouse base station provided a strong information source, the LPS packets did not cause any problems.
Firmware modifications
The firmware is essentially the stock crazyflie-firmware from Github, however we did make a few alterations though:
The maximum velocity of the PID controller was increased to make it possible to fly a bit faster and create a nicer demo.
The number of lighthouse base stations was increased
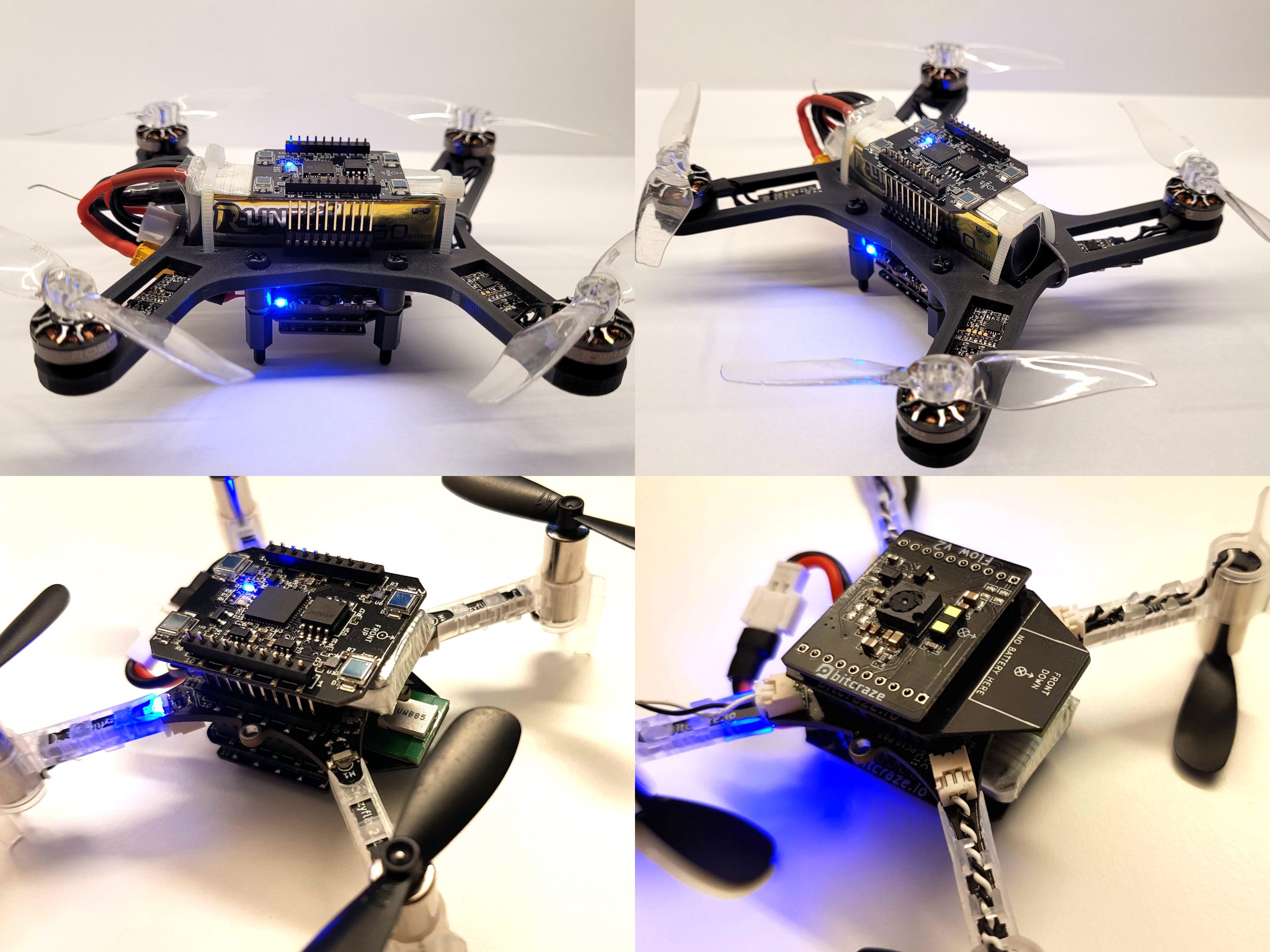
In the demo we used 5 x Crazyflie 2.1 and 1 x Bolt very similar to the Li-Ion Bolt we built recently. The difference is that this version used a 2-cell Li-Po and lower KV motors but the Li-Ion Bolt would have worked just as well.
Hyperdemo drones and they configurations
To make all positioning to work at the same time we needed to add 3 decks, Lighthouse, Flow v2 and Loco-deck. On the Crazyflie 2.1 this fits if the extra long pin-headers are used and the Lighthouse is mounted on top and the Loco-deck underneath the Crazyflie 2.1 with the Flow v2 on the bottom. The same goes for the Bolt, but here we had to solder the extra long pin-header and the long pin-header together to make them long enough.
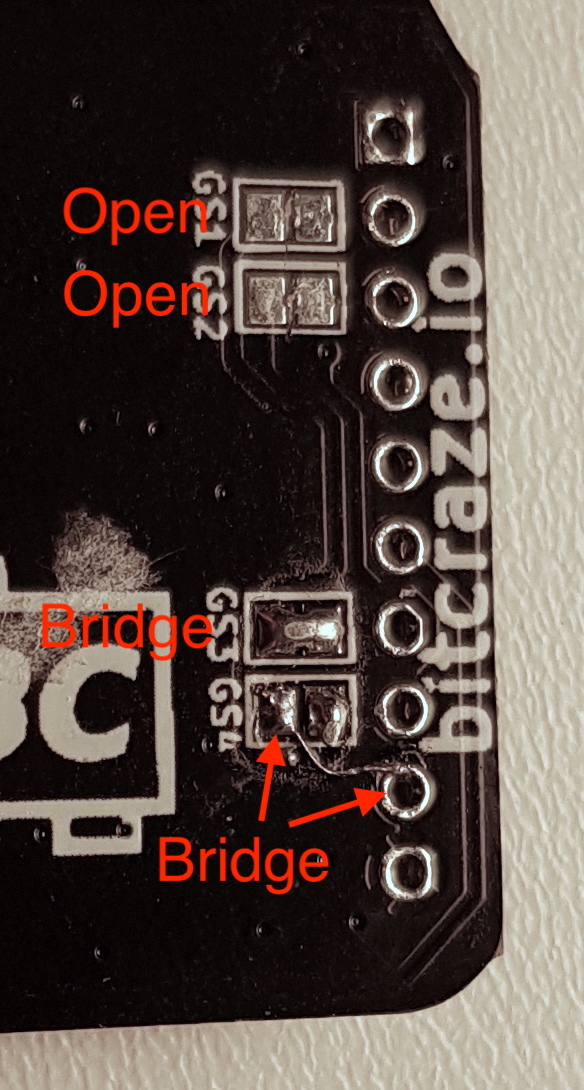
There is one catch though… the pin resources for the decks collide. With some patching of the loco-deck this can be mitigated by moving its IRQ to IO_2 using the solder-jumper. The RST needs to be moved to IO_4 which requires a small patch wire.
Also some FW configuration is needed which is added to the hyperdemo makefile:
The final weight for the Crazyflie 2.1 is on the heavy side and we quickly discover that fully charged batteries should be used or else the crash probability is increased a lot.
Conclusions
We’re happy we were able to set this demo up and that it was fairly straight forward. The whole setup of it was done in one or two days. The App layer is quite useful and we tend to use it quite often when trying out ideas, which we interpret as a good sign :-)
We are satisfied with the results and hope it will inspire some of you out there to push the limits even further!
As many European countries, Sweden is now suffering the effects of the second COVID-19 wave. In line with current local restrictions we’re limiting the number of people at our office, which for us means no external guests and only a few people at a time. Although for customers there won’t be any difference since we’re still keeping our regular shipping (1-2 days after placing the order).
Stock levels
During the next couple of weeks we’re going to be short on some of our products, specifically the Swarm bundle, Loco Positioning deck and AI deck. We’re working hard to get them back into stock, and they are scheduled to arrive first weeks of December.
Lighthouse progress
Lately we have been working on finalizing the support for two lighthouse base stations (V1 as well as V2) in the firmware and python lib, which means that we are messing around with large portions of the lighthouse code. As some of you may have noticed it also means that the code base is unstable from time to time. It is likely that it will take a couple of more weeks before it settles down and it might be a good idea to avoid the latest commit if you are looking for a fully working and documented system. Hopefully we will have a good base for future releases and functionality when we are done.
The latest official stable release is 2020.09 and this is also what we recommend for now.
Last Wednesday we had our first live tutorial event, explaining our Spiral Swarm Demo that we usually show at conferences. About 60 people signed up and it seems that we have about 40-50 people that were able to join from all parts of the world. There were even several Crazyflie users from Asia that stayed up late especially for this, so we definitely appreciated the dedication!
For those who missed it, you can find the recordings and slides on this event page.
The Tutorial
The first hour we were mostly talking about the Lighthouse positioning system and in particular focusing on the base station V2. In real time, we had hands-on sessions where we actually showed how we setup the system, how to retrieve the calibration data and how to achieve geometry. The hour ended with showing a Crazyflie flying in the lighthouse system itself.
After the break , we focused on how to achieve more autonomy in the swarm, where we talked about the limitation of communication, the high level commander and the app layer. This was also shown with hands-on with multiple flying Crazyflies and the full automatic demo at the end. We were able to keep showing the demo in the end for a 30 minutes more while we were resting up with a drink :)
We were using Discord and Mozilla Hubs simultaneously to stream the tutorial. Discord worked out nicely since we could have one channel for the stream and one channel for the chat, which one of us was able to look at continuously. Mozilla hubs was a nice add-on however it definitely had some hiccups and streaming quality issues, which is not ideal for following a tutorial. Also being in Virtual Reality for 2 hours is very exhausting we heard from headset-using participants.
What next?
We really liked doing the tutorial and speaking one-on-one with our users very much so we are likely to organize one again. Not sure at what frequency though but of course we will announce it first. We have already some requests for topics so we will look into those first. Next time it probably will be a shorter tutorial on Discord only. Mozilla Hubs might still be used but as a virtual gallery where we put 3D visualizations of what we are working on (like how the base station sweeps work for instance), so that people can get a better understanding. If you have any request for topics please leave a comment below.
We will also try out to use our new Discord Server as a digital ‘watering hole’ for our users. Here everybody will have the opportunity to chat with each-other, to share awesome projects and to maybe help each-other out with certain questions. However, we will not be on Discord ourselves all the time and still advise to use forum.bitcraze.io as the main place to ask questions and to seek for support.
As mentioned in this blog post, we added the possibility to write apps for the Crazyflie firmware a while ago. Now we have added more functions in the Firmware to make it possible to use apps for an even wider range of tasks.
The overall idea of the app API is to mirror the functionality of the python lib. This will enable a user to prototype an application in python with quick iterations, when everything is working the app can easily be ported to C to run in the Crazyflie instead. The functions in the firmware are not identical to the python flavour but we have tried to keep them as close as possible to make the translation simple.
An app is also a much better way to contain custom functionality as the underlying firmware can be updated without merging any code. The intention is that the api API will be stable over time and apps that work one version of the firmware also should work with the next version.
Improvements
We used our demo from IROS and ICRA (among others) with a fairly autonomous swarm as a driver for the development. The demo used to be implemented in a branch of the firmware with various modifications of the code base to make it possible to do what we wanted. The goal of the exercise was to convert the demo into an app and add the required API to the firmware to enable the app to do its thing. The new app is available here.
The main areas where we have extended the API are:
Log and parameters framework
The log framework is the preferred way for an app to read data from the firmware and this has been working from the start. Similarly the parameter framework is the way to set parameters. Even though this has worked, it broke a basic assumption in the setup with the client, that only the client can change a parameter. Changing a parameter from an app could lead to that the client and Crazyflie had different views of the state in the Crazyflie, but this has now been fixed and the client is updated when needed.
High level commander
The high level commander was not accessible from an app earlier and the functions in the python lib have been added to make it easy to handle autonomous flight.
Custom LED sequences
It is now possible to register custom LED sequences to control the four LEDs on the Crazyflie to signal events or state.
Lighthouse functionality
Functions for setting base station geometry data as well as calibration data have been added. These functions are also very useful for those who are using the lighthouse system as it now can be done from an app instead of modifying lighthouse_position_est.c.
Remaining work
We have taken a step forward with these changes but there is more to be done! The two main areas are support for custom CRTP packets and memory mapping through the memory sub system. There might be more, let us know if there is something you are missing. The work will continue and there might even be some documentation at some point :-)
Tutorial
One reason for doing this API work now was to prepare for the tutorial about the lighthouse 2 positioning system, swarm autonomy and the demo app that we will run this Wednesday on-line, don’t miss out! You can read more about the event here.