This is a follow-up of the Fosdem robotic and simulation I and Kimberly helped organize at Fosdem 2025. The Embedded Linux Conference is taking place this year in the Open Source Summit Europe and we helped by providing some insights on what a robotic track could look like!
This is a very interesting open-source conference, on the opposite side of the spectrum to Fosdem. We are very excited that there is interest in organizing robotics talks there as well, since there are a lot of very important and great open-source projects in the robotic space. I will definitely be joining this year!
This track will explore how open-source technologies are shaping the robotics industry, from software frameworks to simulation projects. There will be talks about tools and their impact, offering insights into both their development process and real-world implementation. If you are interested in giving a talk about your project, you can find the Call for Proposal on the OSS website. The deadline for proposals is the 14th of April and speakers get to attend OSS for free which is a nice perk :-).
A last technical note, the robotic and simulation subtrack, is intended to contain only full 40min talks. So to summit your talk, you need to choose the “Embedded Linux Conference” track, “Robotics” topic and “Session Presentation (40min)”.
Human Robot Interaction (HRI) is a conference that brings together academics and industry partners to explore how humans are interacting with the latest developments in robotics. The conference is held yearly and brings together the many relevant disciplines concerned with the “H” part (cognitive science, neuroscience), the “R” part (computer science, engineering) and the I part (social psychology, education, anthropology and most recently, design).
This year it was in Melbourne (my home city) and I was so grateful to be given the chance to demonstrate a system from my PhD studies called “How To Train Your Drone” in what was its final hurrah, a retirement party! Running the demo was a pleasure, especially with the supportive and curious HRI crowd at such a well organised event .
The take home message from this demonstration was this:
If you let the end user shape, with their hands, the sensory field of the drone, they then end up with an in-depth understanding of it. This allows the user to creatively explore how the drone relates to themselves and their surrounding environment.
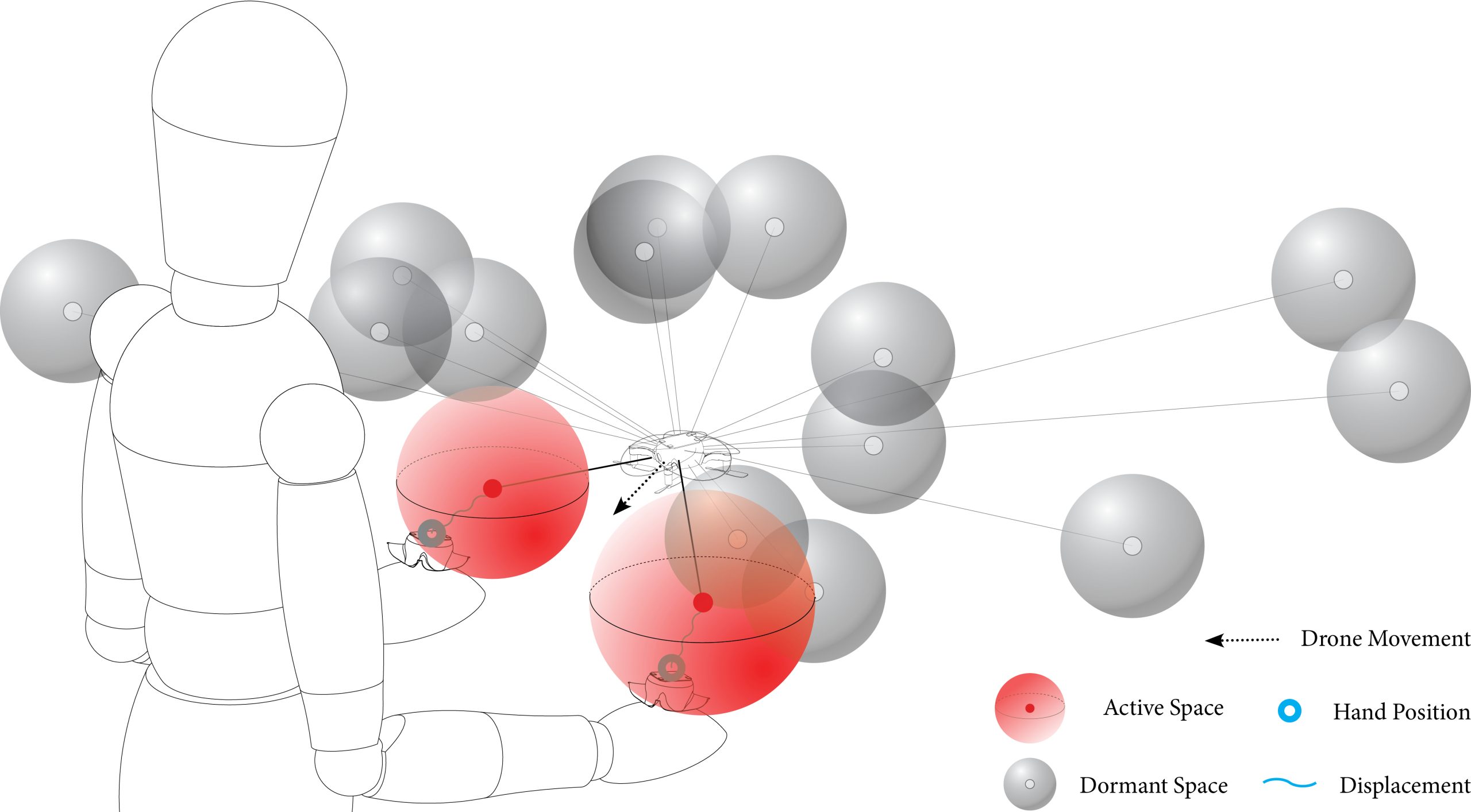
What do we mean by sensory field? Its the area around the drone where it can “feel” the presence of those hand-mounted sensors, represented by the grey and red spheres in the figure below. Initially, the drone has no spheres and therefore cannot respond at all to the user’s movement. But by holding the hands still for a few seconds the user can create a spherical space, relative to the drone where the drone can sense their hands and follow them.
These spheres are “part of the drone’s body”, and so they move with the drone. So in a way you are kind of deciding where the drone can “feel” whilst also piloting it. Should it be sensitive in the space immediately in front of it? Or either side of it?
But shouldn’t it just be everywhere?
Good question! We think the answer is no, and for two reasons:
What we can and cannot sense as humans is what makes us human. It also allows us to understand other humans. E.g. We don’t deliver verbal information directly into other people’s ears at max volume because we have ears and we know that sucks. Nor do we demonstrate how to perform a task to someone with their back turned to us. So by the same token, knowing how a machine senses the world also teaches us how to communicate with it. Furthermore, shaping how a machine can sense the world allows us to creatively explore what we can do with it.
To quote science writer Ed Yong, “Nothing can sense everything and nothing needs to”. Meaning we can get the job done without having to ingest insane amounts of data and even more insane amounts of compute. By cumulatively building an agent’s capacity, in context, with end users, we could actually end up with agents that are hyper specialised and resource efficient. A big plus for resource constrained systems like the Crazyflie and our planet at large.
If you are interested in reading more about this research then please check out this paper (if you like to read) or this pictorial (if you like to look at pictures). Or just reach out in the comments below!
This week, some of us are on an adventure! Marcus and Tobias will be exploring both the RIG and Embedded World fairs.
RIG showcases the latest innovations in robotics and intelligent systems, while Embedded World is the place to be for cutting-edge embedded technologies. Both events promise amazing demos, insightful talks, and a chance to catch up with some of our collaborators.
Planning to attend either fair? Let’s meet up! We’d love to explore the exhibitions together, chat about cool technologies, or just geek out about the innovations on display. We’ll be wandering through Embedded World on Thursday and hitting RIG on Friday. Send us an email if you’d like to connect – we’re always up for grabbing coffee!
Next May in Atlanta
After our adventures as visitors, we’re thrilled to announce that we’ll be exhibiting at the International Conference on Robotics and Automation (ICRA) 2025! Stop by our booth where we’ll be showcasing our latest demo. We’ll be, as always, available to discuss our newest products, answer your technical questions, and provide insights into how our solutions can transform your robotics applications. We’re also eager to hear your thoughts on what you’d like to see in our upcoming products. Mark your calendars and make sure to find us at Booth #131 – we may even have some presentations in the work, but nothing confirmed yet.
Today in the shop
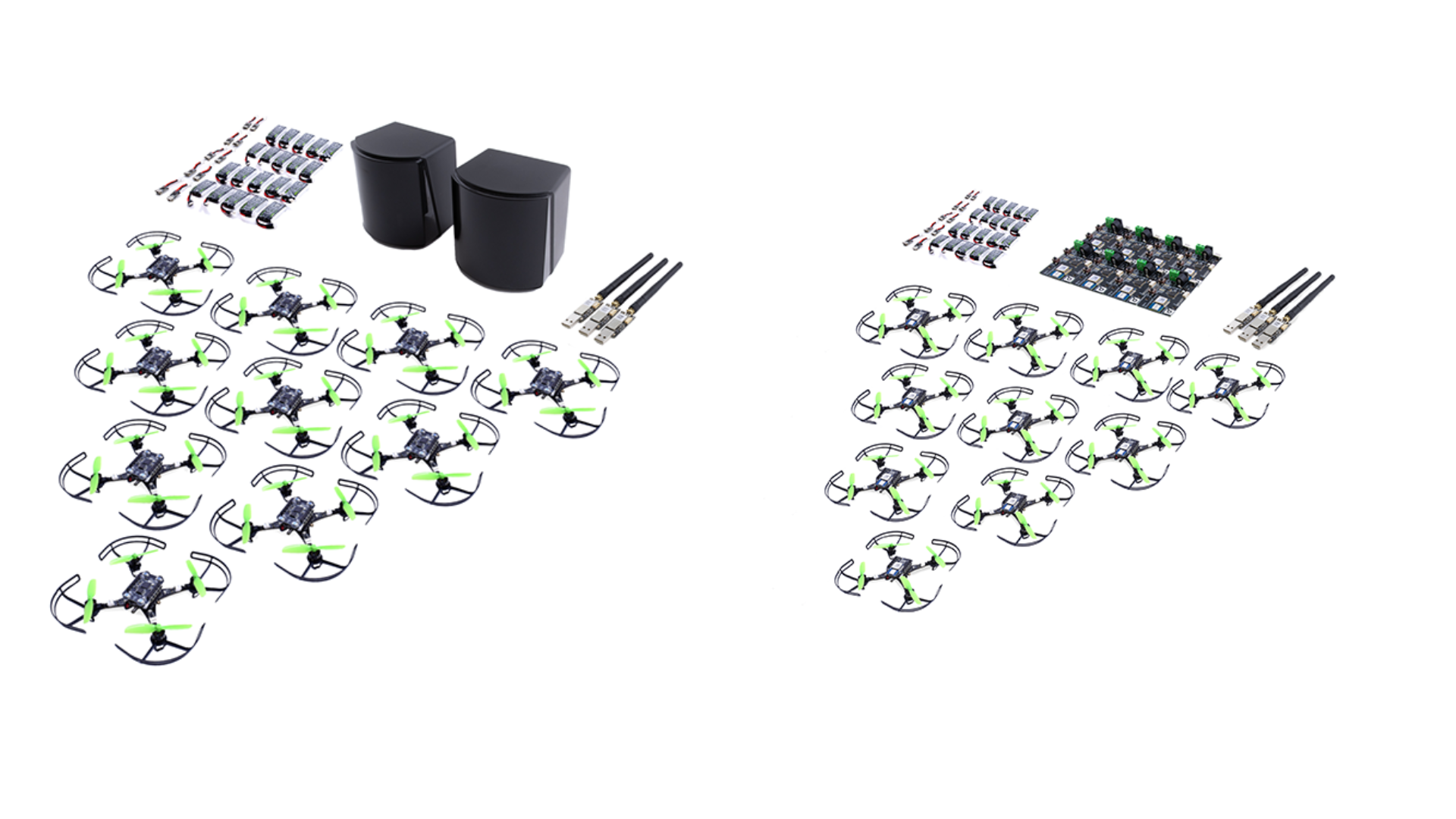
And, last but not least, the Brushless is now available in a Swarm configuration! Both the Lighthouse Swarm bundle and Loco Swarm bundle have been added to our shop. These new bundles feature all the same components as our standard Swarm packages, but come equipped with the Crazyflie 2.1 Brushless instead of the Crazyflie 2.1+ model.
Many of you may be familiar with the “Decentralized Swarm Demo” we have been showcasing at fairs. Today, we’re excited to introduce its upgraded version, the “Decentralized Brushless Swarm Demo”, that utilizes our latest products! Get ready for an even more impressive experience that takes swarm autonomy to the next level!
This demo utilizes the Lighthouse Positioning System for onboard positioning and peer-to-peer communication between the drones for collision avoidance. The fully autonomous takeoff/landing is achieved with the new Crazyflie 2.1 Brushless charging dock, while the bright LEDs under each Crazyflie are prototypes for a new high-power LED deck that is cooking in the Bitcraze pots at the moment.
You can appreciate the stability in this short video:
The Crazyflie 2.1 Brushless Swarm is much more robust and stable than the normal Crazyflie Swarm, as the new powerful motors allow each drone to perform quick maneuvers to avoid its neighbors. We also observed a much longer flight time than we had with Crazyflie 2.1+ – a full swarm of 9 copters could stay up for around 9 minutes before running out of batteries.
Using our own products—especially those in early access—is a crucial part of development. It allows us to encounter real-world issues that our users might face. In this case, we discovered that Lighthouse decks could be damaged during charging if pins protrude from the bottom of the Brushless. This can cause wiring issues with the dock.
If you’re using these components, please ensure that no pins are sticking out beneath the Brushless, or cover the pins at the bottom. We used the battery holder deck to avoid further issues.
The release of the Crazyflie 2.1 Brushless charging dock makes it possible for everyone to recreate demos like this so make sure to check it out at our store. The source code of the demo can be found on github at the crazyflie-firmware-experimental repository under the arena-demo branch.
As written in my previous blog post, Marcus and I have been visiting FOSDEM 25 at the beginning of February 2025 in Brussels, Belgium. This year we helped organize the first Fosdem Robotic and Simulation devroom!
Attending FOSDEM
I have been attending FOSDEM every year since 2015 (except 2020 and 2021 unfortunately …) and while it continues to grow year after year, it is still an awesome experience. It is a great place to talk to the people that make the software we use every day and to get new ideas.
This year we have had very good talk at different booth, most notably at KiCAD and Zephyr, since they are key to the work we do at Bitcraze. We could also attend a couple of really nice talks even though all the dev-room were full most of the time. And as usual we have also seen a lot of random booth and talk that sparks enough ideas to last a couple of years :).
Robotic and Simulation dev-room
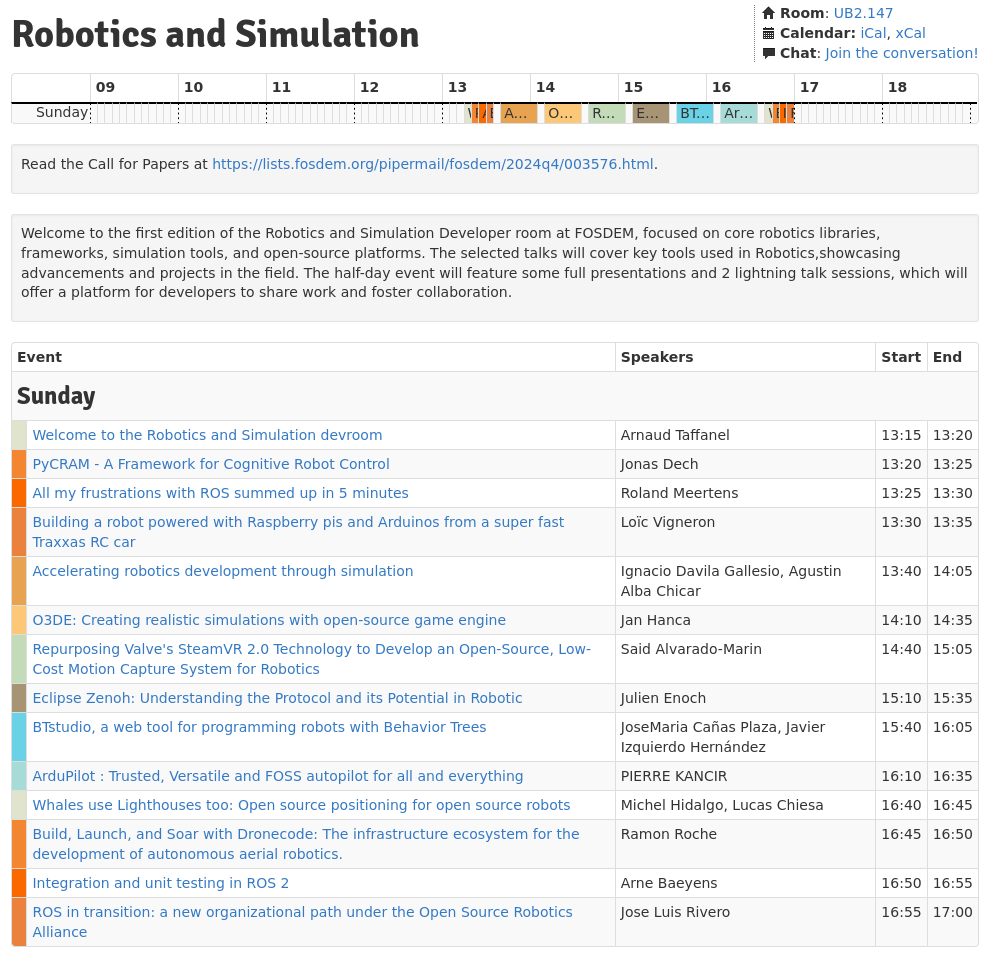
Speaking of full dev-room. We helped organize the Robotic and Simulation dev-room this year. This is the first time there is a robotic dev-room at Fosdem.
The room was a success, it was full all-along and we have very nice talks. It was great to have a meeting point for robotics at Fosdem and we will definitely do it again next year!
If you missed it, most of the talks video are now available on the Fosdem website in the robotic and simulation dev-room page.
It’s hard to believe it’s already been almost a month since the Crazyflie 2.1 Brushless was released. We know some of you have already had the chance to take it for a spin, and we’re really excited to hear what you think.
Here at the office, we have started using them a lot – to discover gaps in the documentation, to test our new features, or simply to make nice trajectories during a Fun Friday as shown here:
We’re constantly amazed by it and the new capacity it brings… But, interestingly, we haven’t received many support questions so far… which has us wondering—did we accidentally make it too good? Jokes aside, we’d love to get your thoughts! Whether you have feedback, questions, or just want to share your experience, we’re all ears.
We have a quick form for you here to fill out – it takes a couple of minutes and would help us a lot:
Marcus and I are going to visit FOSDEM 2025 at the end of the week. This is a great open-source conference that I visit every year but this year there is a twist: I am part of the organisation of the Robotics and Automation devroom! I am going to give the welcome talk there:
FOSDEM is a conference with many tracks, the main track and devrooms. Devrooms are like mini-conferences: they are handled by a committee that produces a call for participation and handles the schedule for the room. FOSDEM allocates a time slot, a physical room, and video recording for the devroom so that all talks are broadcasted in real-time and recorded.
Since my first visit to FOSDEM in 2015, we have been thinking about the lack of a dedicated devroom for robotics: a lot of robotics, at least in research, is open source. This is in part thanks to ROS, which allows for easily sharing modules and algorithms between projects, but it also applies to things like flight stacks that are often open-source. So we took it upon ourselves to organize what we wanted, a robotics-dedicated devroom.
We started last year, at FOSDEM 2024, by organizing a robotics Bird of Feather with Kimberly. These are impromptu meetups that can be organized by booking a time on the spot for a couple of dedicated rooms. There, we had some really nice discussions with fellow robotics enthusiasts and figured out that there was indeed quite some interest in robotics at FOSDEM and that we were enough interested parties to organize a devroom.
If you’re interested in open source and/or robotics and you can be in Brussels, Belgium, on the weekend of the 1st and 2nd of February 2025, please join us! The Robotics and Simulation devroom is on Sunday afternoon. I will also be monitoring our Mastodon channel more carefully, so do not hesitate to poke me if you want to meet either me or Marcus, as we will be at the conference both days.
Hello there! I am Aris, a recent graduate from the Mechanical Engineering and Aeronautics Department at the University of Patras, Greece.
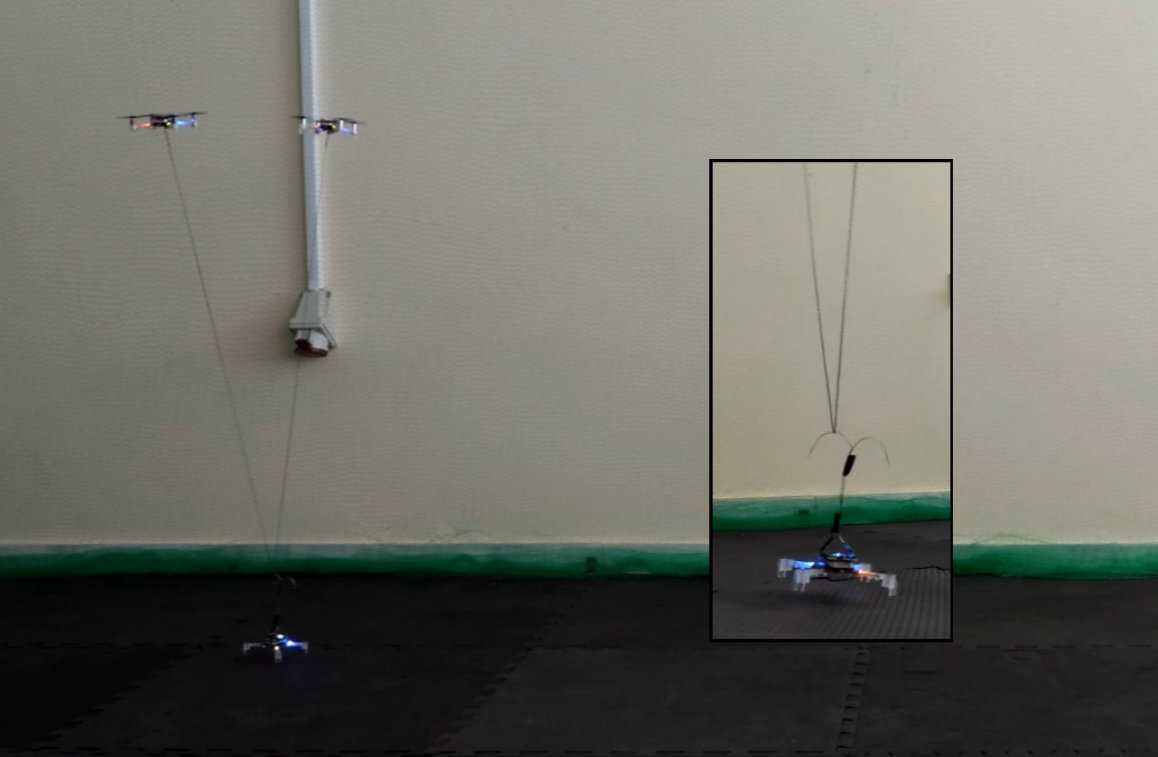
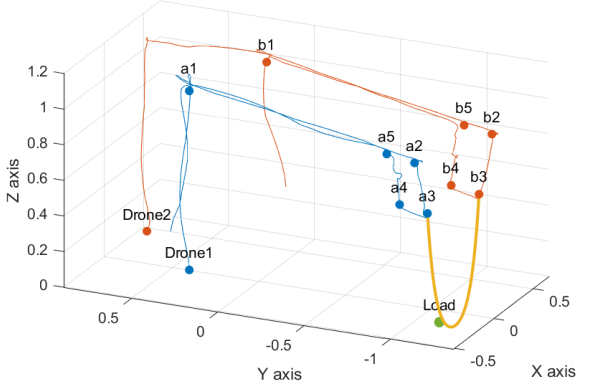
For the last couple of years, as a member of the Robotics Group at the University of Patras, I have been working with Bitcraze products, including the Crazyflie 2.1 and the Lighthouse Positioning System, exploring swarming scenarios. In my diploma thesis I investigated the autonomous transportation of an object by a swarm of two rope-tethered quadcopters, where the introduced path planning algorithm enables the swarm to approach, grasp, lift and transport the load.
The swarm grasping the load. Trajectories Simulation
I’m excited to join Bitcraze as part of the team, where I can further develop my skills and gain valuable work experience. My principal objective is to improve the Lighthouse Positioning System and contribute to the development of a new solution for tracking in larger volumes. During this time, I look forward to deepen my knowledge on Bitcraze’s products and learn how they apply in real-world applications.
After a busy fall of testing and fine-tuning, we’re thrilled to announce that the Brushless is now available! Our team has put in a lot of effort to ensure it meets our high standards, and we can’t wait for you to experience it.
If you’re curious to see it in action, we’ve featured the Brushless in our recent Christmas video, where it showcases its capabilities by navigating through Christmas obstacles with precision.
For those interested in its application in research, our latest blog post demonstrates how the Brushless can be used in academic settings. It’s exciting to see the potential it holds for various fields!
If you need anything to keep your Brushless flying, all spare parts are already stocked in our store. Additionally, many of our bundles now offer Brushless versions, providing more options to suit your needs.
We’re eager to hear your thoughts and feedback as you explore the capabilities of our latest drone. Your insights are invaluable to us and help drive our continuous improvement.
We look forward to seeing what you’ll achieve with the Brushless!
Robotics and Simulation at FOSDEM 25
Arnaud will be at Fosdem the 1st and 2nd of February 2025 in Brussels, Belgium. He’s actually hosting with Kimberly the robotics and simulation dev-room! If you’re in Brussels, we’ll be happy to meet you.
2024 is almost over and 2025 is coming fast so it is a good time for us to think about what is coming for Bitcraze in 2025.
Projects
2025 will be the year of the Crazyflie 2.1 Brushless! We are finally releasing it early January. The end of the development phase was longer that expected (who would have thought manufacturing would be hard … :-), but it is now ready and we are very excited to see what awesome projects the community will come up with using the Crazyflie Brushless.
With the Crazyflie 2.1 Brushless released, we will have more time to dedicate to other projects. Following is a list of fields we think we might look at, no strong promises here though and if you think we should focus on anything specific do not hesitate to drop a comment under this post, a post on github discussions or just send us an email. We have way too many ideas, but we are always open to more :-).
We still have the Lighthouse deck V2 in the back-burner, this is likely something we will look more at soon. As a reminder, the new deck is going to support lighthouse systems with 16 base-stations which will increase the space that can be covered by a lighthouse system
We also have a Wifi camera deck in early prototype, we have been showing it at various conferences in the last years. We are still working on trying to find the perfect Wifi-chip/processor/Camera combo to make it a reality.
We (ie. I) also have a lot of ideas on how to improve the communication with the Crazyflie. Crazyradio 2.0 has a lot of untaped capabilities that we can use to implement better, easier to use and more reliable communication protocols so this is definitely something we want to have a look at.
Finally, I apparently managed to sell the Rust programming language a bit too well to the team. Some of us are even more enthusiastic than I am about it! This together with an increased frustration with Python and PyQT6 distribution to various platform will likely make us experimenting even more in Rust in the future. The first target in sight is to write a Rust lib for the Crazyflie together with binding for various languages including Python and C/C++. This means that would be able to have only one lib for most use case of the Crazyflie both in Python and in ROS.
Conferences
Arnaud is part of the organizing committee of the FOSDEM Robotics and Simulation devroom at Fosdem. Fosdem is one of the biggest open source conferences in Europe. It is an awesome community-driven conference, so if you are not too far and are interested in open-source please join us in Brussels the 1st and 2nd of February 2025!
As usual we will likely participate to a couple of robotic conferences during the year. We are not yet sure which one though so stay tuned for more information on this blog.
Team
The team has been evolving in 2024, we are now 6 in the Malmö office, Mandy is working from Shenzhen in China handling the production and Joe is doing a post-doc in Stockholm in close collaboration with us.
We are actively looking at hiring 2 more team members, one in technical support and one in Sales. Our goal is to build a team where all of us can focus on our strengths to develop even further and faster the Crazyflie ecosystem.
We wish you a great new year filled with hacking and exciting new discoveries!