Today’s blogpost comes from Joseph La Delfa, who is currently doing his Industrial Post-Doc with Bitcraze.
The Qi deck and the Brushless charging dock allow you to start charging a Crazyflie quickly, without having to fiddle with a plug or a battery change. But when you need to charge 10 or more Crazyflies 2.x and don’t want the weight penalty of the Qi deck then some some other solutions are needed.
This blog post is about a couple of chargers I made for the Crazyflie 2.x for my research prototypes. I research interaction design, which often means building something new and then putting in the hands of a user and getting them to try it out. What is important in these scenarios is that when there is unexpected behavior, they don’t think that the prototype is bugging out or broken. One way to prevent this is to make things that have a higher quality to raise the expectations of the user. This can help them stay immersed in the interaction and not look over to me when there is unexpected behavior and say… “is this working properly?”
Wiring Harness for Drone Chi
This charger is essentially a pair of JST 2-pin extensions for a 1S battery charger that I soldered together. Then weaved them through some fake hanging plants. With the drones already looking like flowers for the Drone Chi project, they blended well into the fake plants and all the wires were well hidden. When you wanted to fly, you would disconnect the battery from the wiring harness. Plus it brings the nice experience of picking a flower from a bush before you start flying!
Magnetic Mantle Piece Charger for How To Train Your Drone
This charger allows 10 Crazyflies to charge from their USB ports, but on a bit of a statement piece charger that lived in the lounge room of a group of friends who were participating in a month-long user study during the How to Train Your Drone Project. This charger contained a powered USB hub with cables running through each of the medusa like tubes rising from the base. What made this charger special was the magnetic USB charging adapters (available widely on e-bay, amazon, temu etc) that were plugged into the the USB ports on the drone. These allowed you to securely place the drone on the charger in one action as the magnetic cables integrated into the charger were always close enough to the drone when you set it down, giving you a satisfying * click * every time! They also gave off a eerie blue glow which I think matched the Crazyflie well.
You might already be familiar with the Crazyflie’s presence in numerous publications across various research fields. However, in this blog post, we’ll return to the basics and showcase some robotics concepts that can be taught using our platform. The Crazyflie has already found its way into several classrooms such as the “Introduction to Robotics” in the Mechanical & Aerospace Engineering Department at Princeton University, the “Introduction to Control of Unmanned Aerial Vehicles” at UC Berkeley and the “Embedded control systems” at Chalmers University of Technology. Whether you’re designing a robotics course for undergraduates or developing advanced labs for graduate students, here’s some fields where the Crazyflie can help your students grasp the fundamentals of modern robotics.
Basic Drone Principles
How does the quadcopter generate enough thrust? In which direction should the motors spin? How does the shape of a propeller affect performance? As an introduction to drones and specifically quadcopters, students can explore these basic principles behind how they work. Then, by flying them, they can better understand the three axes of motion, roll, pitch and yaw and even find out their limitations, such as the ground effect.
Control Systems
What is the difference between controllers? How does a different controller tuning affect performance? How does an estimator work? What types of commands can be sent to a drone? The Crazyflie platform offers a rich “playground” for exploring the stabilization process from sensor acquisition to motor control, that we often call “stabilizer module“. This includes a variety of controllers, estimators and commanders that can be modified to visualize results in the real world. Also, with the firmware being open-source and modular, it is relatively easy to build your own controller or estimator and integrate it to the platform.
Localization
How can a drone know its position and orientation in 3D space? What is the difference between a local and a global positioning system? With a wide variety of deck sensors and positioning systems, students can find ways to control the Crazyflie through relative or absolute position/attitude commands. The different sensing methods used in these systems are also interesting to explore – for example, IR signals from the Lighthouse Positioning System, UWB radio from the Loco Positioning System, or optical flow data from the Flow deck v2.
Autonomous Navigation
How could the Crazyflie perform a collision-free trajectory? What is the most efficient way of flying from point A to point B? In the field of autonomous navigation, the Crazyflie can be treated like any other moving robot by applying existing path planning algorithms or testing newly developed ones. Environment-aware problems are always exciting to work on and the Multi-ranger deck makes them feasible.
Swarm Robotics
What happens when you add another Crazyflie to your setup? How could multiple Crazyflies operate in a swarm? How could you make sure that they won’t collide? What is the difference between a centralized and a decentralized swarm? Scaling a system up is always challenging but also fascinating. The examples provided in our Python library help you get a swarm in the air, but it’s up to you and your students to explore how the Crazyflies should coordinate and cooperate.
Small Drone, Big Educational Impact
The Crazyflie ecosystem is a fully capable robotics lab in the palm of your hand. Its flexibility, safety, and robust API support make it ideal for hands-on learning in a wide variety of robotics fields. Integrating the Crazyflie into a university robotics curriculum, gives students the chance to explore, test, fail, and fly their way to mastery.
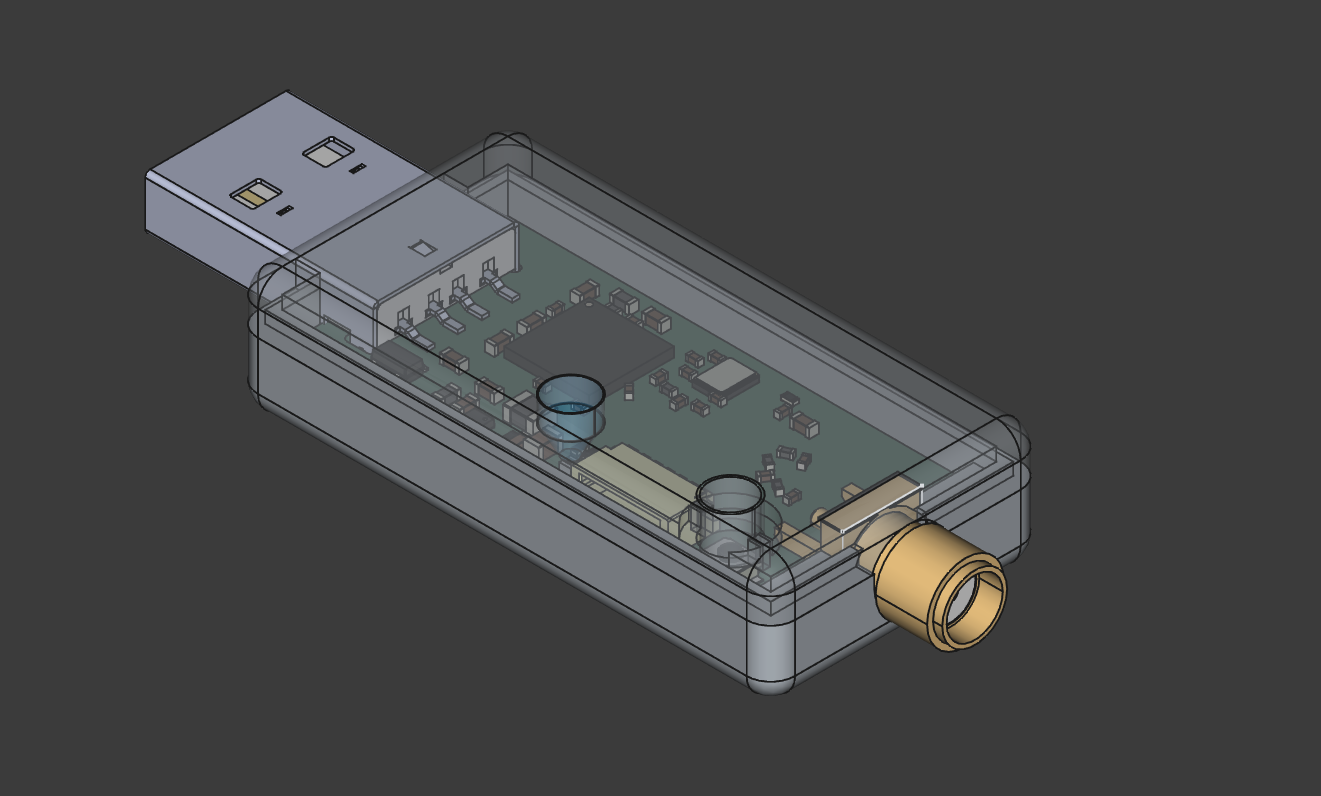
Lately, at home and at work during my Fun Fridays, I have been trying to learn more about 3D CAD and more precisely about FreeCAD, mostly in the context of (ab)using our 3D printers :). Inspired by a couple of Crazyradio cases that have already been published, I started working on a Crazyradio 2.0 case since this has not yet been done, I am quite happy about the result:
The design is mostly press-fit: the top and bottom parts are pressed together and hold thanks to the 3D printed layers interlocking in each-other. The LED lens is pressed in the top and the button actually slides and is guided by the top. The button is flush with the case since it is mainly a bootloader button and is not required to be pressed during normal use.
ECAD/CAD design
One of my goal when starting with this project was to experiment working both with Electronic CAD (KiCAD in my case) and Mechanical CAD (FreeCAD). There is an extension for FreeCAD that allows to go back-and-forth between the two tools, but in this case it was much simpler since my board was already finished, so I only needed to get a model of it in FreeCAD.
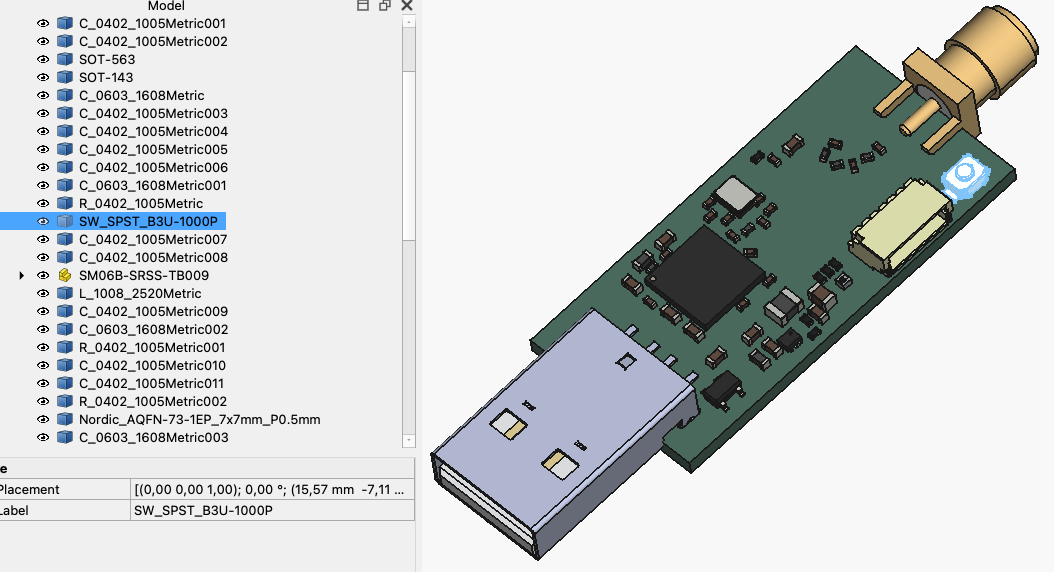
To do so, I made sure all the important components had 3D models in the Crazyradio electronic design. I had to import a couple of models from Mouser, and had to re-create the RGB LED in FreeCAD. I then exported it as a STEP file. This file can be imported in FreeCAD and retain all the interesting shape and surfaces useful to work with the model:
Shape binder: Keeping it DRY
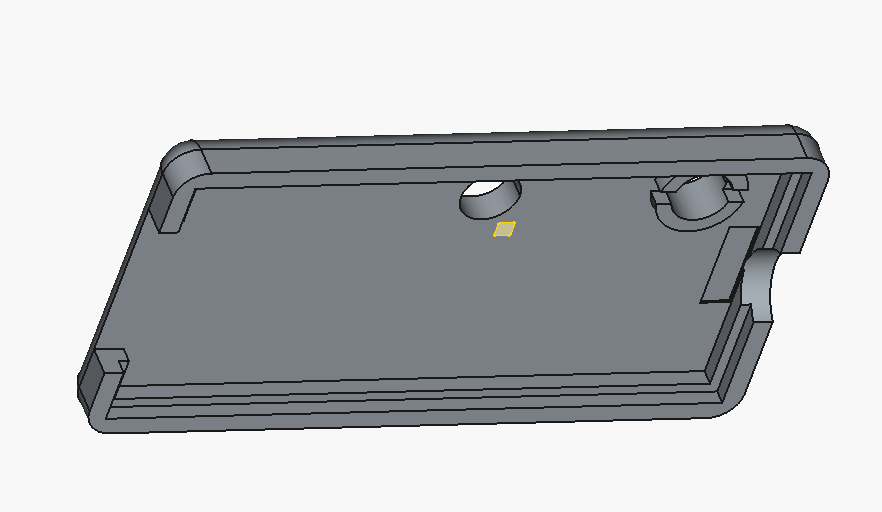
Coming from the software/electronic world, we have this notion of DRY: Do not Repeat Yourself. Ideally I would like to apply the same to mechanical design and avoid as much as possible to write any measurement by hand. one way to do that with FreeCAD is with Shape binder. A good example of its use is with the LED lens.
I wanted to put a translucent lens just on top of the Crazyradio LED. One way to achieve that is to create a Shape binder of the LED top surface onto the TOP and Lens. The LED top is the yellow square in the next picture and its presence allows to align perfectly the hole in the top cover to the middle of the LED on the PCB. This prevent all hazardous manual measurement when placing the hole.
For the lens design I can go one step further, I can create a shape binder both for the LED and for the hole in the top layer, this way the shape of the lens is derived from existing geometry and, to a large extent, does not have to be specified manually:
This allows to quite easily align the lens perfectly on top of the LED. The same principle is used for the button to get it to slide and press on the PCB switch with minimal play.
Final product
I pushed the current state of the case on GitHub. It is also available on Maker World. I plan on improving the design before deciding to name it 1.0 and to eventually upload it on Printables and Thingiverse.
If you want to learn more about FreeCAD, I can recommend this great video series on YouTube, it goes through a lot of very useful functionalities like the shape binders.
With the Swedish summer upon us, things are more calm at Bitcraze. The summer is usually a time for us to look a bit more at fixing infrastructure and other things that we do not have time to work on the rest of the year. One of the things I have been looking at improving lately is the state of our Python projects.
We currently use Python as the default language for everything we do on PC. This includes the Crazyflie lib, Client and other tools for our ecosystem. Over the years the state of the Python projects have greatly evolved. It started in ~2011 with almost no project management at all; just Python files. Then we switched to setup.py/pip support. Recently the Crazyflie client got the pyproject.toml treatment. Now that most Linux distributions prevent pip install-ing packages we need to juggle with venvs in order to use or develop in Python.
In essence, Python started with an easy to use language but has now become quite complex and hard to handle. Things become even more complicated when we take into account CI in Github actions that have to test that our projects actually work with all supported version of Python on Linux/Mac/Windows.
A bit of Rust (tooling) in our Python
As you might have gathered from our previous blog posts over the years, we like Rust quite a bit at Bitcraze and hope to use it more in our products moving forward. One of the great parts of Rust is the quality of the tooling and of the compiler feedback. Cargo as a project management tool helps a lot working with projects in a comfortable and repeatable way.
This is why we are now quite interested in using uv going forward as an official tool to work with the Bitcraze Python projects. uv can replace both venv and pip and makes working with a Python project as easy as working on a Rust one with cargo. It is also very fast and efficient since it is written in … Rust of course :-).
We are also looking at switching from Flake8 to Ruff and Ty for linting and type checking respectively. These two tools, from the same developer as uv are very fast and give very high quality error messages and warnings – this should make it much easier to maintain good code quality.
These changes would mostly be on our documentation and development side. The resulting projects are still compatible with pip and can still be used as they where used before. However we would make sure the projects can be efficiently used with uv.
Example
The Crazyflie client is currently already fully able to run with uv since it already uses the ‘new’ pyproject.toml project config file. So working with the project, from within the project folder, would look like that:
crazyflie-clients-python $ uv run cfclient # Run the Crazyflie client GUI
(...)
crazyflie-clients-python $ uv run ruff check # Check the code, runs in ~100ms!
All checks passed!
crazyflie-clients-python $ uv run pre-commit
Built cfclient @ file:///(...)/crazyflie-clients-python
Uninstalled 1 package in 0.97ms
░░░░░░░░░░░░░░░░░░░░ [0/1] Installing wheels...
Installed 1 package in 4ms
[WARNING] Unstaged files detected.
[INFO] Stashing unstaged files to /home/arnaud/.cache/pre-commit/patch1750684440-121836.
flake8...............................................(no files to check)Skipped
[INFO] Restored changes from /home/arnaud/.cache/pre-commit/patch1750684440-121836.Code language:Bash(bash)
This last command is a great example of the usefulness of uv: currently one need to install pre-commit on a virtual environment, enter it, and run pre-commit in the project. With uv is just works out of the box. In the back of course, pre-commit is installed in a virtual environment in the project folder. But this is all done automatically.
Finally we will also easily be able to test multiple versions of Python:
crazyflie-clients-python $ uv run --python 3.10 pre-commit
Using CPython 3.10.18 interpreter at: /home/linuxbrew/.linuxbrew/opt/python@3.10/bin/python3.10
Removed virtual environment at: .venv
Creating virtual environment at: .venv
Built cfclient @ file:///(...)/crazyflie-clients-python
Updated https://github.com/bitcraze/crazyflie-lib-python.git (3a35d22026c2ed8251b821e4f5b10e67091f811f)
Built cflib @ git+https://github.com/bitcraze/crazyflie-lib-python.git@3a35d22026c2ed8251b821e4f5b10e67091f811f
░░░░░░░░░░░░░░░░░░░░ [0/32] Installing wheels... warning: Failed to hardlink files; falling back to full copy. This may lead to degraded performance.
Installed 32 packages in699ms
[WARNING] Unstaged files detected.
[INFO] Stashing unstaged files to /home/arnaud/.cache/pre-commit/patch1750684632-123219.
[INFO] Installing environment for https://github.com/PyCQA/flake8.
[INFO] Once installed this environment will be reused.
[INFO] This may take a few minutes...
flake8...............................................(no files to check)Skipped
[INFO] Restored changes from /home/arnaud/.cache/pre-commit/patch1750684632-123219.Code language:JavaScript(javascript)
And, for the end user, uvx also simplify running the client:
$ uvx cfclient # Pulls and run cfclient from Pypi
(...)
$ uvx --from cfclient cfloader
Built cfclient
Installed 22 packages in 164ms
==============================
CrazyLoader Flash Utility
==============================
Usage: /(...)/.cache/uv/archive-v0/_OZwn5_zGeTE-qFoK_kEG/bin/cfloader [CRTP options] <action> [parameters]
The CRTP options are described above
Crazyload option:
info : Print the info of the bootloader and quit.
Will let the target in bootloader mode
reset : Reset the device in firmware mode
flash <file> [targets] : flash the <img> binary file from the first
possible page in flash and reset to firmware
mode.Code language:HTML, XML(xml)
This last command would likely be added to all our firmware Makefiles to be used when calling make cload to flash the Crazyflie.
Feedback?
This currently does seem like a good idea to us. If you have any feedback or ideas on how to handle Python projects in a better way we are very interested to hear them. Like I mentioned, the summer is kind of a ‘clean up’ time for us so this is when we have time to look at this kind of things.
A couple of weeks ago, we were at ICRA 2025 in Atlanta. This year’s ICRA drew over 7,000 attendees, making it the biggest edition yet. We had a booth at the exhibition where we showed our decentralized swarm demo. The setup included a mix of Crazyflie 2.1+ units with Qi charging decks and Crazyflie 2.1 Brushless platforms with our new charging dock. The entire swarm operated onboard, with two Lighthouse base stations for positioning. More details about the setup can be found in the recent swarm demo blog post.
8 Crazyflies flying simultaneously in our decentralized swarm at ICRA 2025
Some of the brushless drones carried our high-powered LED deck prototype to make the swarm more visible and engaging. One of the drones also had a prototype camera streaming deck, which held up well despite the busy wireless environment.
A Different Perspective
This year we were also invited to participate in a workshop: 25 Years of Aerial Robotics: Challenges and Opportunities, where I (Rik) gave a short presentation about the evolution of positioning in the Crazyflie, from webcam-based AruCo marker tracking to the systems we use today.
Usually, we spend most of our time on the exhibition floor, so being part of a workshop like this was a different experience. It was interesting to hear researchers mention the Crazyflie in their work without needing to explain what it is. That kind of familiarity isn’t something we take for granted, and it was nice to see.
Many thanks to all the participants of the workshop '25 Years Of Aerial Robotics: Challenges And Opportunities' that we had the pleasure to co-organise for #ICRA2025. The speakers, young researchers, chairpersons and, of course, the attendees all made it a unique experience🦾 pic.twitter.com/WNfUUYLtop
The workshop also gave us a chance to talk with both established researchers and newer faces in the field. What stood out most was hearing how people are using the Crazyflie in their work today. It’s very rewarding to see how what we do at the office connects with and supports real research.
Catching Up and Looking Around
One of the most rewarding parts of the conference was the chance to connect directly with people using the platform. We talked to many users, both current and past, and saw new research based on the platform. It was also great to reconnect with Flapper Drones, who build flapping-wing vehicles powered by the Crazyflie Bolt. And it was nice to see HopTo on the exhibition floor for the first time. The company is a spin-off from the Robotics and Intelligent Systems Lab at CityU Hong Kong, which published a Science Robotics paper on the hopcopter concept that used a Crazyflie. We also had the chance to catch up with a maintainer of CrazySim, an open-source simulator in the Crazyflie ecosystem. It’s always valuable to connect with people building on top of the platform, whether through research, hardware, or open-source tools.
Wrapping Up
ICRA 2025 was packed with activity. From demoing the swarm, to the workshop, to hallway conversations, it gave us a lot of valuable feedback and insight. Thanks to everyone who stopped by, joined a talk, or came to say hello.
As the demand for open, modular, and research-grade robotics continues to grow, Bitcraze is entering a strategic distribution partnership in China, one of the world’s most advanced and fast-evolving markets for robotics and education.
Researchers, educators, and industrial developers in China will benefit from easy access to Bitcraze’s entire product ecosystem. This includes high-performance indoor drones, positioning systems, and modular development tools widely used in academia and R&D across the globe.
Our new exclusive agreement with NOKOV Motion Capture, marks a step forward in expanding access to our autonomous drone systems and robotics development kits across China.
Expanding Access for China’s Robotics Community
Through NOKOV Motion Capture, customers in China gain professional support in Mandarin, short delivery times, and access to official training, demos, and bundled solutions. Together, we’re making it easier than ever for Chinese institutions to explore autonomous flight, precision tracking, and open-source robotics innovation.
A Powerful Integration of Motion Capture and Flight
One of the most exciting aspects of this partnership is the technical synergy between NOKOV Motion Capture’s industry-leading motion capture systems and Bitcraze’s versatile flight platforms. NOKOV Motion Capture’s optical tracking technology is already a staple in academic and industrial research labs throughout China.
By integrating this with Bitcraze’s drones and positioning systems, users can achieve highly accurate, low-latency indoor positioning, conduct repeatable flight experiments with synchronized motion data, and enjoy a seamless workflow from trajectory capture to analysis.
This combination opens up new possibilities for research in fields like robotics control, swarm behavior, artificial intelligence, and simulation.
Supporting Research, Education, and Development
Bitcraze’s systems have earned the trust of top universities and laboratories around the globe. With this partnership, we continue to support Chinese institutions working on:
Swarm robotics and AI research
STEM and engineering education
Indoor navigation and environment interaction
Lightweight aerial prototyping and simulation
We believe in giving innovators the tools they need to experiment freely, iterate faster, and go further.
Start Your Journey with Us
Whether you’re designing new robotic systems or preparing your classroom for hands-on drone-based learning, Bitcraze and NOKOV are here to support your ambitions.
If you’d like to learn more or get started with our products in China, please reach out to NOKOV for local support and information.
As we mentioned in a previous blog post, the last couple of weeks have been full of exciting events in the US. We first began our adventure in Charlotte, North Carolina, where we attended the International Conference on Unmanned Aircraft Systems (ICUAS), as platinum sponsors.
We were especially thrilled to be involved because the final stage of the conference’s competition featured Crazyflies, which played a central role in the challenge.
The ICUAS UAV Competition
This year’s competition simulated a search mission in an urban environment. The goal was for teams to identify ArUco markers placed on multiple obstacles, while maintaining line-of-sight and communication among a swarm of three Crazyflies.
Each team’s UAVs launched from a designated base, navigated a known environment, and attempted to locate several targets. The drones relied on an OptiTrack system for positioning and used the AI deck as a camera for image recognition. Constant communication between the base and all UAVs was required throughout the mission.
The event, organized by the LARICS team, combined both simulation and real-world implementation. Their hard work ensured that competitors could smoothly transition their systems from digital models to actual flying drones. What followed was an intense and fun two-day hackathon.
Although the ICUAS UAV Competition drew interest from 26 teams globally, only five finalist teams made it to Charlotte to run their scenarios with real drones. In the end, it was Team Aerial Robotics from the Indian Institute of Technology Kanpur (IITK) who took home first place—congratulations to them!
While the event went smoothly overall, some communication challenges cropped up—solved creatively by placing a radio in the center of the arena. Battery management was also key, with fully charged packs being a hot commodity to maximize flight time.
Research and Presentations
Alongside the competition, the conference featured a wide range of research presentations. We were proud to see Rik present on the AI deck during a workshop focused on embodied AI.
One of the highlights was the Best Paper Award, which—although we missed the talk, was awarded to a team from Queen’s university using the Crazyflie to simulate drone landings on ocean waves. You can read their fascinating paper here: https://arxiv.org/abs/2410.21674
Final Thoughts
Overall, ICUAS 2025 was a great experience—full of innovation, collaboration, and of course, plenty of flight time. We’re grateful to the organizers, competitors, and everyone who stopped by our booth. Until next time!
Imagine a drone that can fly indefinitely, autonomously recharging and navigating its environment with minimal human intervention. For corporate innovators designing proof of concept solutions or researchers seeking to push the boundaries of autonomous systems, Bitcraze’s Infinite Flight project represents a novel opportunity.
Since Bitcraze first introduced the “Infinite Flight” concept in 2023, the idea of a Crazyflie drone that can operate for days, autonomously recharging and executing missions, has steadily moved from experiment to practical tool. For those working in robotics, automation, or research, this is a quick update on what’s changed and why it matters.
What’s Changed Since the last Infinite Flight?
Hardware and Firmware Improvements
Crazyflie 2.1 Brushless now features improved power efficiency and longer flight times, which is essential for multi-day operation.
Charging Dock Upgrades: The move from Qi wireless to contact-based charging has made energy transfer more reliable and reduced cycle downtime.
Firmware Stability: The latest firmware (2025.02) brings fixes for brushless ESC flashing, improved default parameters, and more robust long-duration performance.
Host Software: The cfclient now uses PyQt6 for better graphical performance, and cflib’s new full-state setpoints offer more precise control.
Navigation and Autonomy
Recent work on visual route following enables Crazyflie to retrace long paths using snapshot-based visual homing, reducing drift even on resource-constrained hardware.
The autopilot’s app layer now makes it easier to implement custom, persistent behaviors without deep firmware changes.
Real-World Applications of Infinite Flight
Research and Industry Applications
Environmental Monitoring: Continuous data collection for air quality or wildlife studies, where drones need to operate for days at a time.
Industrial Inspections: Persistent monitoring of infrastructure like wind farms or power grids, reducing the need for human intervention.
Swarm and Formation Flight Research: Some labs are using Crazyflie to simulate spacecraft formation flying or to test swarm coordination algorithms over long durations.
Route Following: The new visual homing approach allows for reliable, repeatable long-range missions, which is especially valuable for mapping or inspection tasks.
Why Infinite Flight Matters
Long-duration, autonomous operation is a key enabler for real-world robotics. The recent hardware and software updates make Crazyflie a more practical platform for those kinds of experiments-whether you’re working on persistent autonomy, adaptive navigation, or multi-agent systems.
If you’re experimenting with similar ideas or have a use case that could benefit from multi-day drone operation, it might be worth a look at the latest Infinite Flight developments. As always, feedback and collaboration from the community are welcome.
Start your Infinite Flight Now
Ready to experience the power of uninterrupted autonomous flight? The Infinite Flight Bundle equips you with all the essential tools to keep your Crazyflie 2.1 Brushless airborne around the clock.
The package leverages the Lighthouse positioning system, providing precise on-board tracking across a 5x5x2 meter area. With accuracy reaching below 10 cm and minimal jitter, your drone can safely navigate its flight path while autonomously docking on a charging pad. Once recharged, it’s ready to lift off again—enabling continuous flight operations without manual intervention.
Fredrik Ehrenstråle joins Bitcraze as Strategic Growth Director
Have you ever wondered what could happen if open robotics were truly accessible to everyone — researchers, educators, and innovators alike? That’s the vision that drew me to Bitcraze, and why I’m thrilled to share that I’ve joined the team as Strategic Growth Director.
Bitcraze isn’t just a technology company — it’s a community of curious, collaborative people who believe in making robotics both powerful and playful. From my very first conversation with the team, I felt the energy and integrity that set this place apart.
Over the past decade, I’ve had the privilege of working with organizations big and small, translating complex tech into real-world impact. What excites me most is helping people like you turn bold ideas into reality — whether you’re pushing the boundaries of research, inspiring students in the classroom, or building new industrial solutions.
At Bitcraze, I’ll focus on finding new ways for us to grow, building partnerships that matter, and making sure our story resonates with the people who can benefit most. But more than anything, I want to listen and learn from this amazing community.
If you’re curious about what we’re building, have thoughts on the future of robotics, or just want to swap ideas,I’d love to connect. Let’s shape what’s next together!
In just two weeks, we’re packing our Crazyflies and heading off for a busy and exciting couple of events: ICUAS (International Conference on Unmanned Aircraft Systems) and ICRA (IEEE International Conference on Robotics and Automation) in Atlanta. This year is a bit different for us: not only will we be showing some new prototypes, but we’re also giving three presentations across the two conferences. In this post, we’ll share a quick overview of what we’ll be presenting and a first glimpse at the prototypes we’re bringing along.
ICUAS 2025
Charlotte, N.C.
May 14-17
First stop: ICUAS, where we’re proud to sponsor the competition. Teams will be using Crazyflies both in simulation and real life to deploy UAV teams in an urban environment to identify threats – and we’ll be there to support them!
But that’s not all: As part of the workshop “Embodied-AI for Aerial Robots: What do we need for full autonomy?“, Rik will present a keynote titled “Crazyflie and the Realities of Edge AI.” The talk shares practical lessons from bringing AI onto the Crazyflie, covering challenges with complex toolchains, fragmented ecosystems, and the gap between expectations and real-world constraints, along with a look at how new hardware developments could reshape what is possible for small aerial robots.
It’s our first time attending ICUAS, and we’re thrilled to not only be part of the competition but to actively contribute to the technical discussions.
ICRA 2025
Atlanta, GA
May 19-23
Just two days after ICUAS ends, we’re heading straight to ICRA in Atlanta. You’ll find us at booth 131, right in front of the Tech Talk stage – come by and say hello!
At ICRA, Rik will speak in the workshop “25 Years of Research in Aerial Robotics“, giving a talk titled “Crazyflie and the Art of Getting Where You Meant To Go“. He’ll reflect on Bitcraze’s journey through the classic aerial robotics challenge of positioning, from the early days of building a tiny, modular flying PCB to supporting researchers around the world.
We’ll also take part in the Undergraduate Robotics Education Forum on May 22nd, where Barbara will be presenting a poster about Crazyflie as an educational platform.
New Prototype Sneak Peek
As always, we’re bringing prototypes for upcoming products: We’ll be showing a prototype of a straightforward camera deck with WiFi streaming, aimed at adding basic visual capabilities to the Crazyflie.
We’ll also bring an updated demo setup with even more Brushless Crazyflies and charging docks — combining the best parts of last year’s ICRA presentation and our current “fish tank” office demo. The demo will also feature prototype High Power LED decks, a new product we’re currently working on.
If you’re curious about what’s next for Crazyflie, this is a perfect chance to get an early look and chat with us about it!
Bring Your Posters!
Last year, we decorated the Bitcraze office with posters from researchers working with Crazyflies, and it turned out amazing. We’d love to do it again! If you have a poster you’re proud of featuring Crazyflie, bring it by the booth – we’ll swap it for a little Bitcraze surprise.
All in all, it’s shaping up to be two incredible weeks. Whether you’re attending ICUAS, ICRA, or both, stop by to see the Crazyflies in action, hear what we’re working on, and chat with us. We can’t wait to reconnect with old friends and meet new ones — see you soon!