The AI-deck is now available in our online store! Super-edge-computing is now possible on your Crazyflie thanks to the GAP8 IoT application processor from GreenWaves Technologies. GAP8 delivers over 10 GOPS of compute power at exceptionally low power consumption enabling complex tasks such as path-finding and target following on the Crazyflie, consuming less than 0,1% of the total energy.
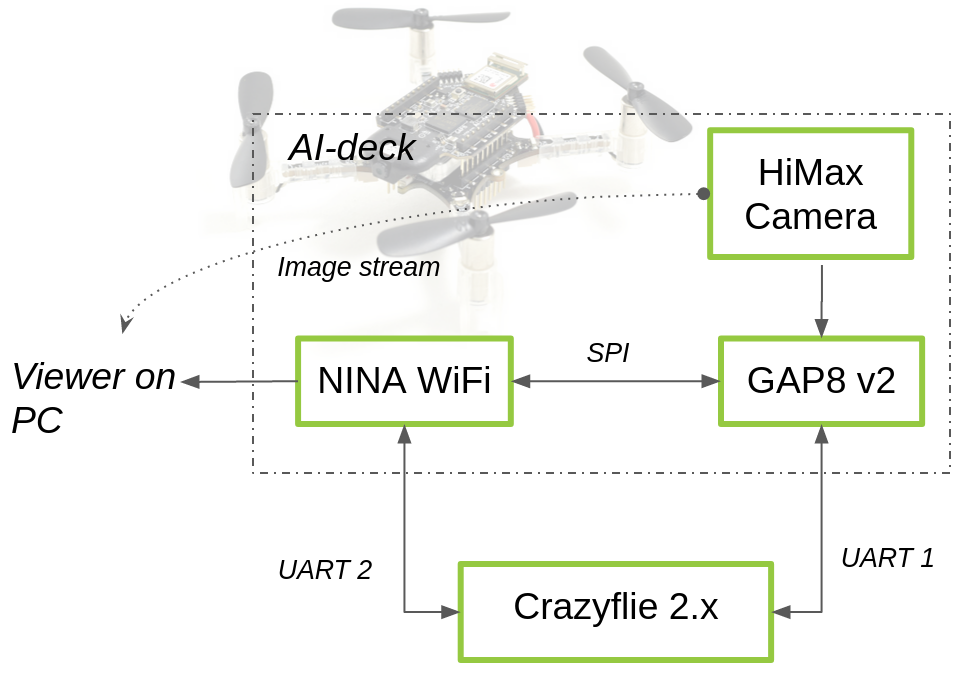
The AI-deck can host artificial intelligence-based workloads like Convolutional Neural Networks onboard. This will open up many research areas focusing on fully onboard autonomous navigation of tiny MAVs, like ETH Zurich’s PULP-Dronet. Moreover, there is also ESP32 WiFi connectivity with the possibility to stream the images to your personal computer.
We are happy that we managed to get everything ready so soon after our last update. Crazyflie AI-deck is in early access, which means the hardware design is now finalized and full support for building, running and debugging applications (including GreenWaves’ GAPflow tools for porting neural networks to GAP from TensorFlow) is available, however, limited examples of specific AI-deck applications have been developed so far. Read more about early access here. Even though there is still some work to be done, there are already some examples you can try out which we will explain in this blog post. Also, we aim to have all AI-decks pre-flashed with the WiFi streamer example so that you check out right away if your AI-deck is working.
Beware that you need an JTAG-enabled programmer/debugger in order to develop for the AI-deck!
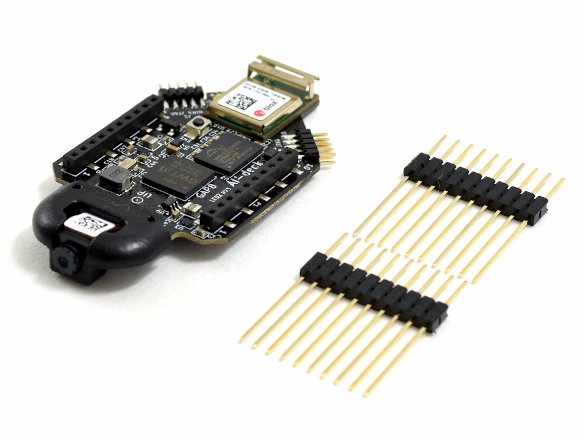
Technical specifications
The AI-deck will come with two elongated male pin-headers, which enables the user to connect it to the Crazyflie with an additional deck. There are two 10 pin JTAG connectors soldered which enables connection with a JTAG-enabled programmer. This will be the main way to program the GAP8 chip and the ESP-based NINA module while it is still in early access.
Getting started
When you first receive your AI-deck, it should be flashed with a WiFi streamer example of the camera image stream. Once the AI-deck is powered up by the Crazyflie, it will automatically create a hotspot called ‘Bitcraze AI-deck Example’. In this repo in the folder named ‘NINA’ you will find a file called viewer.py. If you run this with python (preferably version 3), you will be able to see the camera image stream on your computer. This will confirm that your AI-deck is working.
Next step is to go to the docs folder of the AI-deck examples repository. Try out the WiFi demo and set up your development program with the getting-started guide. This guide contains links to the GAP-SDK documentation from GreenWaves Technologies. You can read more about the face detector example that we demonstrated in this blog post.
It’s been more than 2 months since we decided, to preserve our health and the Swedish health care system, to work from home. Since then, the majority of the world has had to do the same, and as all of you, we had struggled to adjust to this new situation. What’s it like behind the curtain ?
The home setting
First things first: I’m not from the tech side of the company. Setting up my working environment was not difficult. I have my laptop, I plug it, and boom, I’m ready to work. I know that some of my colleagues had to get creative, setting up base stations in their summer house or in their kitchens.
My main problem setting up was dealing with comfort and distractions. Comfort means finding a good chair, and resist the temptation to just slouch on the couch – let’s be honest, maximum productivity is not achieved when the remote control is one arm’s length away.
Dealing with distractions is a whole another problem. My husband works remotely too. We’ve learned quite quickly that we can’t both work in the living room: collisions of video calls, or simply resisting the urge to chitchat together made it impossible. But the one major distraction that was impossible to ignore is 20 month-old and full of youthful energy. In Sweden, preschools are not closed, but every cold symptoms mean staying at home. It is perfectly reasonable, but we soon realized that having a toddler nearby is incompatible with working peacefully. As many parents have learned during the last couple of months, kids are a great way to lose your train of thoughts, to disrupt a video-call with inappropriate sentences or to simply disrupt any plan. As fun as it was to see how our daughter deal with the “no banging on the room’s door when mommy is working” rule, I feel incredibly lucky that we have a big enough apartment to be able to work in a separate room, and of course that she was able to have fun at the daycare while we could work from home.
A new routine
I have to say that I’m quite proud with the way we settled into this new routine. We meet each morning, setting up the goals of the day. We did that at the office too (see here), but where it lasted 10 minutes when we were all together all day, it can easily climb up to 45 minutes now. We tried to use new tools, and whether those worked or not (if you can tip on a good virtual whiteboard we’ll appreciate it!), in those two months we had time to experiment new ways of working. We tried to set up a quarterly meeting, (meaning a whole day of meeting) without a good quality webcam.. And managed it!
As the days turned into weeks, we realized that one big problem with our new setup meant that each day looked the same. This Groundhog day feeling made us lost count on our 3-week cycle and left the weekends with a strange, unsatisfying aftertaste. After all, now that I’m all the time at home, what’s the difference between a workday and a Saturday ? Well, I haven’t figure out a good solution yet.
It’s not all bad, though. I like that my new routine includes a big, often home-cooked lunch with my husband (I’m French, so of course my first thought is towards cooking !). And after the first weeks of minor stumble, the Bitcraze team is as productive as ever, with some exciting things coming soon. I have to admit too that I got used to listening to my own music while working, or that reducing the commute has allowed for some much appreciated 30 extra minutes of sleep.
And, last but not least, with the warm days returning, I started taking my laptop near the sunlit window, allowing for a great bask in the sun – what I often need to gather up energy.
My perfect spot near the window
Away but together
Each one of us had his struggle with remote work. For me, who has just started in the company, it was an unexpected challenge. I still have a lot of things to learn, and it’s easier when I can just tap on someone’s shoulder or quietly observe what they’re doing. Instead, I had to figure out quickly how to do things on my own. It meant making some mistakes, but eventually I’m convinced I’m now more efficient than if I had more relied on my colleagues – learning things the hard way is sometimes the best way.
If you are working from home too, you’ll understand when I say that the hardest part has been to keep up the motivation. At Bitcraze, we’re a tight-knit group, and I never realized before how much I rely on social interactions to keep me going. I’m a social animal, and my coworkers are always one of the most important part of my work. Helping them, seeing how they’re doing, sharing a ‘fika’ (Swedish coffeebreak) … I had no idea it was such a big chunk of my workplace well-being.
Thankfully, we’re now a digital tight-knit group. We have daily digital fikas to keep up with each other’s progress, and even though we could be more thorough with them, it helped with the loneliness.
As I noticed my motivation went usually down after my home-cooked lunch, a new resolution came forth: after lunch, exercise ! A great way to keep in shape and to resist the temptation of a quick nap. I’ll indeed gingerly admit that, with a comfy bed so close, it’s hard to not think about closing my eyes, just for one second… Getting the body moving and the heart rate up is the best solution I’ve found to avoid this trap, with the added benefit of not gaining too much weight during this strange period.
We also started having picnics when the weather allowed it. Respecting social distancing (each on its own blanket), it is a great way to reconnect, share a meal in the sun, and appreciate the great parks of Malmö.
A Bitcraze picnic
All in all, I’ve learned a lot during these months working from home. We’ve managed to tackle the hurdles in our way and found our stride with this new routine. Improvisation, creativity and adaptation were necessary, but I’m happy to report we didn’t lose our motivation and will to create great product !
New stock
Speaking of great products, we have renewed our stocks that were beginning to thin a little. The buzzer decks, for example, are back in stock !
It has been a while since we have updated you all on the AI deck. The last full blogpost was in October, with some small updates here and there. It is not that we have not focused on it at all; on the contrary… this has been a high priority project for a while now. It is just quite a complex board with a lot of bells and whistles, which can be challenging to work with sometimes so early in development, something that our previous intern can definitely agree on. So therefore we rather wanted to wait until we were able to make sufficient progress before we gave you an update… and so we have!
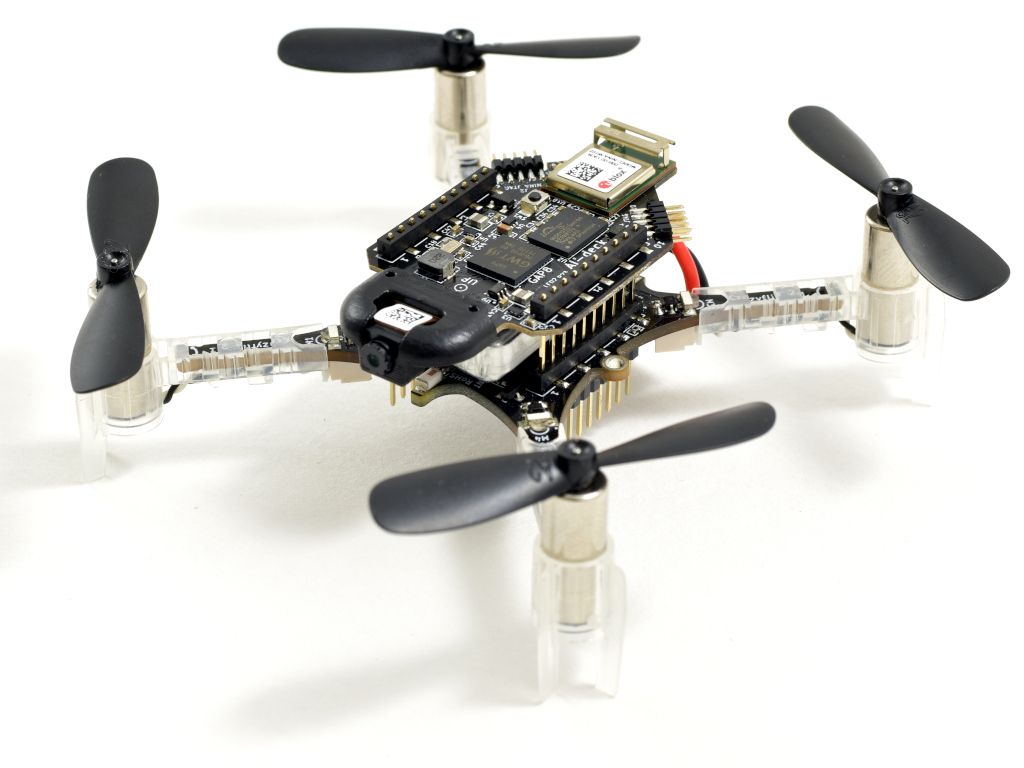
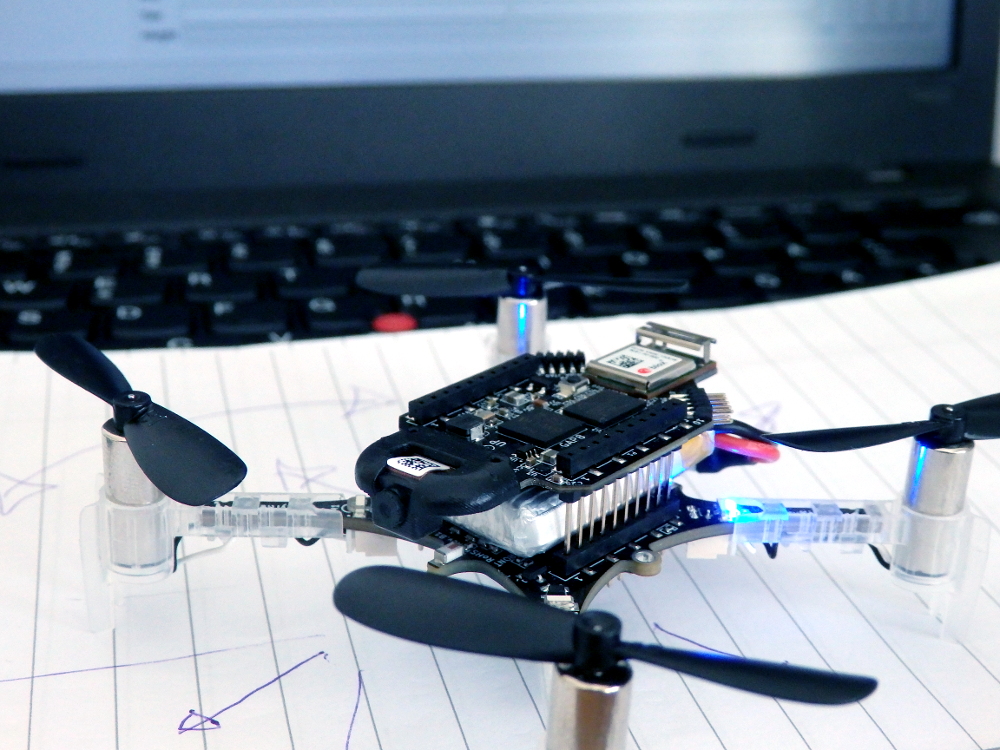
A Crazyflie 2.1 with the AI deck
Together with Greenwaves technologies we have been trying to get the SDK of the GAP8 chip on the AI deck stable enough for an early release. The latest release of the SDK (version 3.4) has proved itself to work with relative ease on the AI deck after extensive testing. Currently it is possible to use OpenOCD for flashing and debugging, and it supports most commonly available debuggers with a jtag connector. In the upcoming weeks both of Bitcraze and Greenwaves will test and try out all examples of the SDK on the AI deck to make sure that everything is still compatible. Also the documentation will be extended as well. As there is so much to document, it might be difficult to catch all of it. However, if you notify us and Greenwaves on anything that is missing once the AIdeck is out, that will help us out to catch the knowledge gaps.
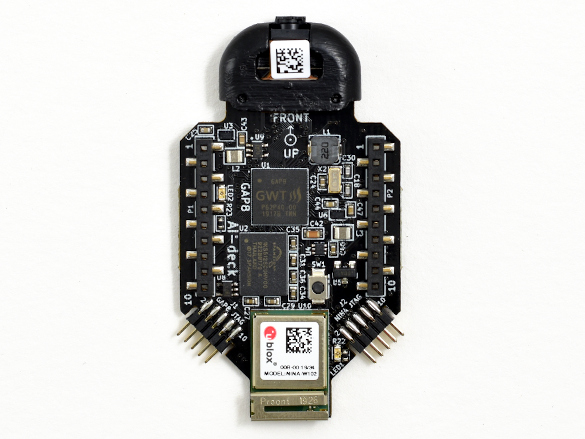
The AI deck also contains the ESP-basedNINA module for establishing a WiFi connection. This enables the users to stream the video stream of the AI deck onto their computers, which will be quite an essential tool if they would like to generate their own image database for training the CNNs for the GAP8 (and it happens to also be quite practical for debugging by the way!). Currently it is required to set credentials of your local WiFi network and reflash the AI-deck to be able to connect and streaming the images, but we are working on turning the Nina into an access-point instead so no reflashing would be required. We hope that we will be able to implement this before the release.
Top view of the AI deck
We are also trying out to adjust applications to make suitable of the AI deck. For instance, we have adapted Greenwaves’ face-detector example to use the image streamer instead of the display available on the GAPuino boards. You can see a video of the result here underneath. Beware that this face-detector is not based on a CNN but on HOG descriptors, so it only works in good conditions where the face is well lit. However, it is possible to train a CNN to detect faces in Tensorflow and flash this on the AI deck with the GAPflow framework as developed by Greenwaves. At Bitcraze we haven’t managed to try that out ourselves ( we are close to that though!) but at least this example is a nice demonstration of the AI deck’s abilities together with the WiFi-streamer. This example and more testing code can be found in our experimental repo here. For examples of GAPflow, please check out the examples/NNtool section of the GAP8 SDK.
For some reason WordPress has difficulty embedding the video that was supposed to be here, so please check https://youtu.be/0sHh2V6Cq-Q
Seeing how the development has been progressing, we will be comfortable to say that the AI deck could be ready for early release somewhere in the next month, so please keep an eye out on our website! We will continue to test the GAP SDK’s stability and we are very thankful for Greenwaves Technologies with their help so far. We will also work on getting-started guides in order to get acquainted with the AI deck, supplementing the already existing documentation about the GAP8 chip.
Even-though the AI deck will soon be ready for early release, this piece of hardware is not for the faint-hearted and embedded programming experience is a must. But keep in mind that the possibilities with the AI deck are huge, as it will be mean that super-edge-computing on a 30 gram flying platform will be available for anyone. It will all be worth it when you have your Crazyflie flying autonomously while being able to recognize its surroundings :)
For the users that have subscribed to our github repository this does not come as an surprise, but for the rest, we have released a new version of our Crazyflie firmware (both STM and NRF) last week!
We know that it is quite close to our last release in February, but we had so many changes and contribution that we deemed it necessary to add a stamp to this current version. In this blog-post, we will give an overview on which features to expect in this update.
UART communication
With courtesy of Saarland University, it is now possible to connect the Crazyflie through its UART to a port on your raspberry pi or through an FTDI cable directly to your computer. This is an extra port for communicating with CRTP will open up new possibilities to interact with your crazyflie.
This is compatible with CFlib version 0.1.10, however there was a fix implemented in the current master (see the ticket here). Please see the ticket for the UART communication here if you are interested in the implementation details.
Lighthouse
It is now possible to get the lighthouse geometry (the position and orientation of the base stations) without SteamVR. We made a script based on the latest stable release of openCV, to calculate the base station geometry based on the received sweep angles on the lighthouse deck. Check these full instructions on how to use this new script. It is a very new and fresh implementation, so if you are experiencing any trouble, please leave an issue on this page or leave a comment on the forum.
Also, FPGA v4 is now integrated in 2020.04, which support Basestation v2. This is still in a very early phase and not yet fully integrated in the firmware, so please keep an eye on this ticket for the implementation process in the latest master of the crazyflie-firmware. There was also a blogpost a few weeks ago about the current state of the lighthouse v2 development.
Bluetooth management
We also provided an update of the bluetooth management of the Crazyflie communication by the NRF chip. Before, it was (unintentionally) possible to connect to the Crazyflie over Bluetooth while it also connected to the CFclient through the crazyradio PA. This caused a lot of unwanted elements such as package loss and unresponsiveness. Now, whenever a Crazyradio packet has been received, Bluetooth will automatically be disabled. The same goes for the peer-2-peer packet, so the NRF firmware no longer needs to be flashed without Bluetooth support. The Crazyflie needs to be restarted after connecting through the CF dongle or P2P in order to connect to it again with the Crazyflie mobile app.
General fixes and improvements
Here are the general fixes and improvements listed that has been fixed in release v2020.04:
BMI088 (IMU of the CF2.1) has an self-test now.
Fixed memory issue with the Micro SD card deck.
High-level commander improvements.
Documentation improvements.
LPS TDoA (2 and 3) improvements.
See the release notes of the crazyflie-firmware and crazyflie-nrf-firmware to see the full list of improvements and issues that were fixed in 2020.04. The zip files for the firmware for both the roadrunner (tag) and crazyflie (cf2) can be found here.
The Lighthouse V2 implementation has been simmering away for a long time in the Bitcraze kitchen and in this blog post we will give you an update on the current status and what is remaining for a full release of this tasty dish.
Crazyflie 2.1 and Lighthouse V2 base station
We believe we have solved most of the major technical hurdles (last famous words) on the way to a working implementation that uses Lighthouse V2 base stations for positioning, now it is mostly work to implement the functionality that is remaining. As described in this post we now have a new FPGA binary that has the ability to decode both V1 and V2 base stations, and this was a major step forward. This new binary is used in the Crazyflie firmware master branch, and if the Lighthouse deck is used with the latest Crazyflie firmware, the new FPGA binary will automatically be flashed to the deck.
What has changed?
The new FPGA binary uses a different UART protocol to communicate with the Crazyflie. This protocol has been implemented in the firmware and hopefully there is no functional difference compared to the previous FPGA binary when using Lighthouse V1 base stations.
We have added a first version of Lighthouse V2 base station decoding, but it is still a bit limited. As a start we decided to “emulate” V1 base stations to be able to reuse as much of the existing code as possible. For now we support only 2 base stations and they must use channel 1 and 2 (used to be called modes). The V2 angles are transformed into V1 angles and fed into the old positioning logic and are handled exactly the same way as before. Even though this works, it is not the optimal solution and we hope to be able to refine it later on.
We have also written a python script to estimate base station geometry (positions and orientation) using the Lighthouse deck. This removed the requirement to use software from Steam which should simplify the set up process. Please see the (still limited) documentation. Note that this calibration method only supports the basestation V1… for now!
There is a lot of code that has been modified and the FPGA implementation is completely new, it is not unlikely that there is functionality that is unstable or broken, or configurations that are not supported. If you happen to notice any bugs, please let us know!
What is remaining?
The functional areas that needs to be implemented or cleaned up before we leave the Early Access stage is the following:
Calibration data
The calibration data is embedded in the modulated light from the base stations and describes imperfections from the manufacturing process for each individual. This data is not read yet for V2 and will increase the precision when available.
Support for more than 2 base stations
Lighthouse V2 base stations are designed for systems with more than 2 base stations. The Crazyflie firmware needs to be extended for this functionality to work, including handling of geometry data, logging, memory management and some other bits and pieces.
Native V2 positioning
The angles from the V2 base station should be fed directly into the kalman filter for positioning, instead of first being transformed into V1 angles. This will increase robustness and reduce data loss.
Client support
We want to add a tab in the python client where a Lighthouse system can be monitored, configured and managed. It should, for instance enable the user to configure and visualize base station geometry.
FPGA binaray management
Currently the FPGA binary is included in the Crazyflie firmware and it is automatically uploaded to the deck when booted. This is not a viable long term solution and we hope to be able to find a more generic way of handling deck binaries.
Conclusions
As can be seen, there is still quite some work to be done before the Lighthouse V2 stew is ready to be served, but we are definitely starting to smell some nice flavours from the kitchen!
Finally a view from Kristoffer’s home lab, currently in the summer house. Three base stations are set up as a Fun Friday hack to see what it would take to use more than 2. Luckily it did not take too much time to get this to work :-)
In this blog-post we wanted to give you guys an overview of our running projects and a general update of the status of things! We got settled in our home-labs and are working on many projects in parallel. There are a lot of development happening at the moment, but the general feeling is that we do miss working with each other at our office! With our daily slack Bitcraze sync meetings and virtual fikapause (Swedish for coffee breaks), we try to substitute what we can. In the mean time, we are going on a roll with finishing all our goals we have set at our latest quarterly meeting, so here you can read about those developments.
AI-deck
Crazyflie with AI-deck
The last time we gave an update about the AI-deck was in this blog post and in the final post of our intern Zhouxin. Building on his work, we are now refocusing on getting the AI-deck ready for early release. The last hurdle is mostly software wise on which we are considering several approaches together with the manufacturer of the Gap8 chip Greenwaves technologies. Currently we are preparing small testing functions as examples of the different elements of the AI-deck in our repo, which are all still in a very primarily phase.
Even though we still need some time to finalize the AI-deck’s early release, we will consider sending an early version of the AI-deck if you are willing to provide feedback while working with it. Please fill in the form and we will get back to you.
Lighthouse
We have made quite some progress on the development for the lighthouse V2. Kristoffer has been working hard from his homelab to get a seamless integration of both V1 and V2 in our firmware (check out this github issue for updates). Currently it is still very untested and very much in progress, however we do have a little preview for you to enjoy.
Crazyflie with LH basestation v2
Documentation
Right now, we are also doing a lot of revamping of the large web of documentation. Unfortunately this is a lot of work! As you noticed by now, we have added overview pages to guide the reader to the right information. We also have moved the tutorials to another part of the menu to avoid clutter on our website. In general we try to go through the repository docs to see if there is any information missing or outdated, however please let us know if you have encountered an error in any description or are missing crucial elements.
Our latest task is revamping the product pages as well, by putting all the necessary information about the hardware in just one place. Also, we are planning to make (video) tutorials soon about many elements of the Crazyflie and how to work with it. More about that later!
Production and Shipment
Production at our manufacturers in China are slowly starting up again. Although it is not yet back at full force, it does enable us to already start ordering to replenish our stock and to get started with finishing our test rigs. Moreover, we are also negotiating to resolve the propeller issue we mentioned earlier, but there is no update on that so far.
As mentioned in this blogpost, we are still shipping orders about twice a week. Both DHL and Fedex are functioning as normal, but we do notice that there is a delay of a few extra days on some deliveries. Please keep that in mind when ordering at our webshop.
Many people in the world have now settled in the reality of working from home. We have also taken precautions ourselves by not go to our office as normal and only ship out packages a few times per week instead of every day (see this blogpost). This also means that we do not have full access to our lab with all our equipment and positioning systems in our big 10 x 10 meter flight lab at the office. In this blogpost we will show how we manage to keep on developing and flying, even in the current situation.
Crazyflie flying in a kitchen with the lighthouse deck
In(light)house positioning
Currently we started to use the Lighthouse positioning system to setup up the remote home lab at our houses. As of recent additions to the Crazyflie firmware, it has been made easy to get the geometry data from the base station. Now the only items we need for indoor flight are just two (or only one) lighthouse basestations V1’s and a Crazyflie, and that is it! There is no need for an HTC Vive headset or hub, or third-party software like SteamVR and the setup is finished in 2 minutes! Check out the new documentation here if you want to know more about the new setup of the lighthouse positioning system.
Also, we recently got a very primarily version of the lighthouse V2 working (see here) and we of course want to keep the momentum going! We will be working on full compatibility from our homes so stay tuned. For now, see this video of the Crazyflie flying with just a single base-station, taken from one of our team-member’s home lab.
Remote Lecture Hall and Practicals
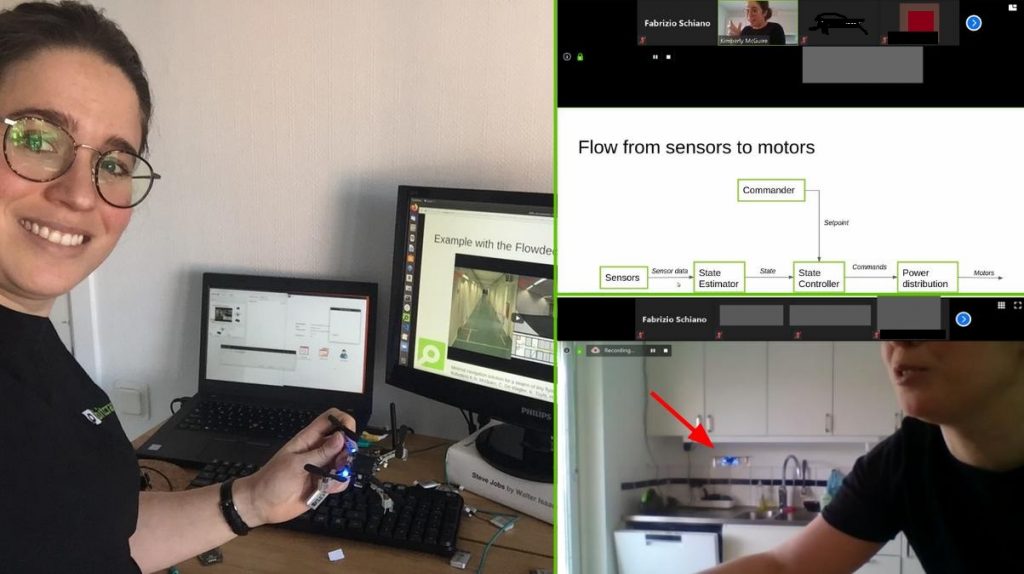
We were invited by Dario Floreano and Fabrizio Schiano from the EPFL-LIS laboratory to do a lecture for the ‘Aerial Robotics’ Course as part of EPFL’s Master’s program in Robotics. Due to the virus, we had to cancel our trip to go there physically… but luckily we were able to do the lecture remotely anyway!
Screenshots of the lectures
The lecture consists of two parts. In the first hour we mostly explained about the Crazyflie ecosystem, hardware and sensors. In the second hour we focused on how the stabilization module worked, including the controllers and the state estimation. During both sessions, we alternated between the theory slides with actual hands-on demos. The lighthouse positioning system was setup in a kitchens, so that we were able to show full flights and practicals with the Crazyflie. At the end there was also the push-demo with just the flowdeck and multiranger, which didn’t use any external positioning at all.
The lectures can be found below and the documentation has been updated as well with the covered material (see here). Be sure to check out the controller tuning presented in part 2 of the lecture (25:00 – Cascaded PID controller).
We know that there are currently users that are moving their flight lab from their university or company to their homes to be able to continue their work. We would love to hear about your experience and your home lab! Send us an email with your story to contact@bitcraze.io, drop us a message on forum.bitcraze.io, or mention us in your Twitter, Linkedin, Facebook or Reddit post. Also, if you want to setup your own home lab and you need any advice or help, please let us know!
We have mentioned the Active Marker deck in an earlier blog post, and are now happy to announce that it has been released and is available in our store.
Crazyflie with Active marker deck
By changing the passive, reflective markers to active, IR-LEDs, it is possible to improve the detection of markers in the cameras. There are two main reasons: the area of the marker is smaller and easier to separate from other markers close by, and the LEDs are emitting light and can be detected further away.
The deck has been developed in collaboration with Qualisys and together with the QTM system, it utilizes their Active Marker technology. An ID is assigned to each marker, and since the identity of each marker can be detected by the MoCap system, it is possible to estimate the full body pose of the Crazyflie without unique marker positions or known starting positions. IDs are easily assigned using the parameter sub system of the Crazyflie.
Even though the deck mainly is intended to be used with Qualisys MoCap systems, the LED markers can also be configured to be on or off which we hope might be useful in other applications as well.
Who knew propellers would be that hard? Already from the very beginning with the Crazyflie 1.0, we had problems with very unbalanced propellers resulting in reduced flight performance. The fix at that time was to manually test and sort out the bad propellers. This worked well until the manufacturer’s injection mould got too worn down and we had to reject a lot of propellers. The manufacturer didn’t want to continue selling us the propellers unless we accepted them all. The hunt for a new manufacturer begun and after trying several, we finally, just in time for the Crazyflie 2.1, found one that could deliver well balanced propellers.
That could have been the end of a happy story but recently we found out that the new propellers tend to break too easily. The root cause seems to be that the center hole is too tight, causing tension in the plastic which makes it more fragile and prone to break.
Typically broken propeller
We don’t fully understand when this started but it looks like it was not that frequent in the beginning when the Crazyflie 2.1 was released and that it has increased from the batch manufactured in the end of July 2019. We don’t have data on how many propellers are bad but our estimation is around 20-40% and it is booth CW and CCW propellers. It also includes the spare part bundles manufactured in the second half of 2019.
Currently out main focus is to fix this propeller manufacturing issue. As soon as we have done so, we will lunch some form of replacement propeller program so that those of you that have gotten many bad propellers can get new ones for free. We don’t have any time estimate right now, and due to the world covid-19 crisis we have a feeling it can take a while. We are very sorry about this!
Insert propeller so it sits firmly, but not further
Workaround
There is an easy, but not ideal, workaround for this and that is to not push the propeller all the way down on the shaft. Instead stop when force is getting high and it holds the propeller in place. This will prevent the tension in the propeller to become big enough to break.
For those that have ordered after the 16th of March we have fixed the propellers by drilling the center hole slightly larger. This solves the problem for those units until we have fixed the root cause at the manufacturer.
Considering the recent pandemic and the global situation, we at Bitcraze had to think about what will be our next step. Even though everyday life in Sweden is still going on, and all of us are in good health, we know there are a lot of you that are impacted by the CoronaVirus. We wanted to take responsibility for each other, the Swedish health care system, and the rest of our community by actively minimizing our social interactions. The best we can do right now is contributing to stop the disease and preserve our health.
So for the time being, we all will be working from home. Shipping of orders will be a bit slower (twice every week instead of the current four times), but other than that we hope to still be available as usual. Forums posts, sales and other daily tasks will go on as usual. Hopefully you won’t see the difference! We will still work on providing you the best flying experience we can.
With the new situation comes new challenges for the team, that we’re trying to make the best of. First of all, we will test a whole new way of working – together but apart! And we hope this will also give us the opportunity to work on some things that otherwise are a little bit left out… But you’ll have to be a little patient to discover these!
If you’re stuck at home and are getting bored, why not fly your Crazyflie and send us a video? We’ll post regularly those on our social media to fight against the current feeling of gloom and potential loneliness associated with confinement!
Our thoughts and well-wishes are with everyone affected by the situation.