Now it is time to give a little update about the ongoing ROS2 related projects. About a month ago we gave you an heads-up about the Summer ROS2 project I was working on, and even though the end goal hasn’t been reached yet, enough has happened in the mean time to write a blogpost about it!
Crazyflie Navigation
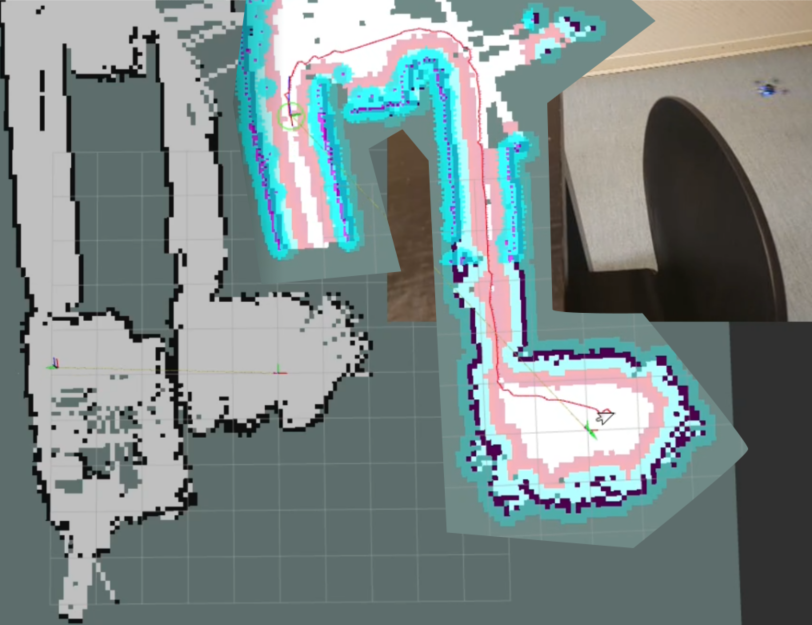
Last time showed mostly mapping of a single room, so currently I’m trying to map a bigger portion of the office. This was initially more difficult then initially anticipated, since it worked quite well in simulation, but in real life the multi-ranger deck saw obstacles that weren’t there. Later we found out that was due to this year old issue of the multi-ranger’s driver incapability to handle out-of-range measurements properly (see this ongoing PR). With that, larger scale mapping starts to become possible, which you can see here with the simple mapper node:
If you look at the video until the end, you can notice that the map starts to diverge a bit since the position + orientation is solely based on the flow deck and gyroscopes , which is a big reason to get the SLAM toolbox to work with the multi-ranger. However, it is difficult to combine it with such a sparse ‘Lidar’ , so while that still requires some tuning, I’ve taken this opportunity to see how far I get with the non-slam mapping and the NAV2 package!
As you see from the video, the Crazyflie until the second hallway. Afterwards it was commanded to fly back based on a NAV2 waypoint in RViz2. In the beginning it seemed to do quite well, but around the door of the last room, the Crazyflie got into a bit of trouble. The doorway entrance is already as small as it is, and around that moment is also when the mapping started to diverge, the new map covered the old map, blocking the original pathway back into the room. But still, it came pretty close!
The diverging of the map is currently the blocker for larger office navigation, so it would be nice to get some better localization to work so that the map is not constantly changed due to the divergence of position estimates, but I’m pretty hopeful I’ll be able to figure that out in the next few weeks.
Crazyflie ROS2 node with CrazySwarm2
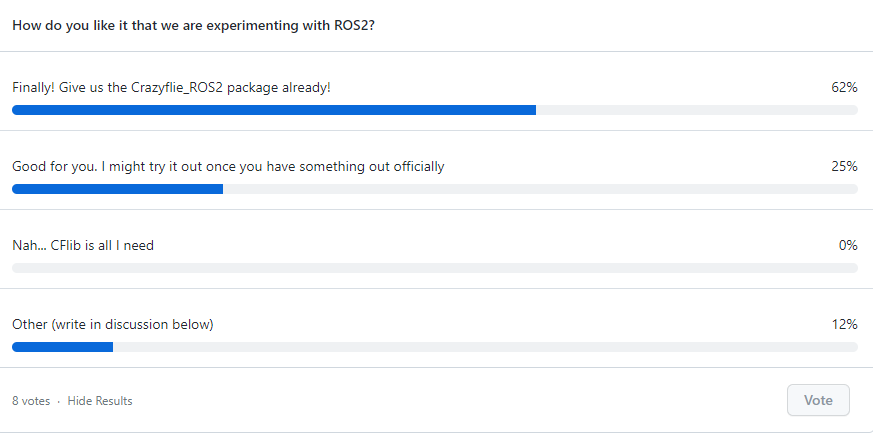
Based on the poll we set out in the last blogpost, it seemed that many of you were mostly positive for work towards a ROS2 node for the Crazyflie! As some of you know, the Crazyswarm project, that many of you already use for your research, is currently being ported to ROS2 with efforts of Wolfgang Hönig’s IMRCLab with the Crazyswarm2 project. Instead of in parallel creating separate ROS2 nodes and just to add to the confusion for the community, we have decided with Wolfgang to place all of the ROS2 related development into Crazyswarm2. The name of the project will be the same out of historical reasons, but since this is meant to be the standard Crazyflie ROS2 package, the names of each nodes will be more generic upon official release in the future.
To this end, we’ve pushed a cflib python version of the crazyflie ros2 node called crazyflie_server_py, a bit based on my hackish efforts of the crazyflie_ros2_experimental version, such that the users will have a choice of which communication backend to use for the Crazyflie. For now the node simply creates services for each individual Crazyflie and the entire swarm for take_off, land and go_to commands. Next up are logging and parameter handling, positioning support and broadcasting implementation for the CFlib, so please keep an eye on this ticket to see the process.
So hopefully, once the summer project has been completed, I can start porting the navigation capabilities into the the Crazyswarm2 repository with a nice tutorial :)
ROScon talk
As mentioned in a previous blogpost, we’ll actually be talking about the Crazyflie ROS2 efforts at ROScon 2022 in Kyoto in collaboration with Wolfgang. You can find the talk here in the ROScon program, so hopefully I’ll see you at the talk or the week after at IROS!
We’re now in the middle of summer, and even though we’re not affected by the heat much here in Sweden, we’re still in a slower pace as usual, since a lot of us are not at the office. Sales, packing, support and general maintenance takes up a lot of our time for those that are left at the office. We also usually take the summer time to clear out lingering issues and focus on some projects that we can tackle alone.
This summer though will be mostly used for preparation of a very busy autumn. As the Covid situation seems to normalize around the world, conferences onsite are restarting, and we plan to take advantage of this ! Here is what is planned:
IMAV – Delft, 12 to 16 September.
The 13th edition of the International Micro Air Vehicle Conference will be held in Delft, in the Netherlands. We’ve been collaborating for a long time with the MAVLab in Delft, so we’re really happy to be one of the sponsors for this conference. For the occasion, there is a nano AI competition that we’re really excited to see. With the AI bundle, the goal is to fly as fast as possible through an obstacle course.
We’ve been working a lot with the AI deck this past year, so this competition is the perfect occasion for us to see it in action. Kimberly has also developed a simulator that will be used for this competition.
ROSCon – Kyoto, 19 to 21 october
ROSCon is a conference dedicated to the entire ROS community, traditionally held right before IROS. Kimberly will be our proud represent there, as she will have a talk about ROS2 and the Crazyflie. For the occasion, she will showcase the latest ROS2 integrations in collaboration with the maintainers of Crazyswarm2.
Last time a Crazyflie was present at ROSCon was in 2015, where Wolfgang Hönig had a lightning talk. A lot has changed since that time, and we’re hoping to increase the presence of (tiny) aerial vehicles within the ROS community, especially nanocopters like the Crazyflie.
IROS – Kyoto, 23 to 27 october
IROS is one of the largest robotics conferences worldwide, and after an online edition last year, this 35th instance promises to be full of exciting things!
As it’s quite huge, and for a quite delayed 10th Bitcraze’s anniversary, the whole company plans to get to this conference. Not only for the chance to discover Japan, that most of us haven’t visited, but also because it feels important to have a significant presence in this conference, which promises a lot of opportunities. That would mean a week without anyone at the Swedish office, but you know where to find us if you would like to talk to us ;).
For the occasion, our intern Marios is working on revamping the autonomous swarm demo. Because of the pandemic, it’s been a while since we actually used it for a whole day of flying, and he’s actively working on making it completely autonomous by implementing the peer to peer protocol.
Logistics
As you can see, those exciting 3 conferences almost back-to-back promise a busy autumn here at Bitcraze. There’s a lot to prepare ahead of time, like marketing materials, demo setups, visas problems and hotel bookings. And there will be a lot to talk about, during and after. The pandemics have delayed a lot of our in-person meetings, and it will feel really good to finally get to meet up in the real world with users – old and new. If you have the opportunity, don’t hesitate to come by our booths on those conferences and say hello in person!
As the Crazyflie ecosystem expands, more and more novel aerial (but also ground or hybrid) robots are being built with one of the Crazyflie controllers onboard. For recent examples, you can check e.g. the recent blogpost about ICRA 2022.
In this post, I will introduce yet another Crazyflie-Bolt-powered aerial robot, the Flapper Nimble+ from our company Flapper Drones, which unlike other flying robots doesn’t have any propellers but uses flapping wings instead.
The best aerial robot design is…
Small drones, or micro air vehicles, have seen a lot of progress and new developments in the last 20 years. The most widespread design nowadays is a quadcopter, such as the Crazyflie 2.1. But is a quadcopter the ultimate (micro) drone solution? At Flapper Drones, we believe nature might provide even better designs… For some applications at least! 😊
Flying like a bird…
Flapper Drones is a spinoff of the MAVLab of the Delft University of Technology. At the MAVLab, we have been researching bio-inspired flight as part of the DelFly project since 2005. From the beginning, the goal has been to develop a lightweight, mission capable micro air vehicle, the design of which would draw inspiration from nature. Over the years, many such MAV concepts have been designed, built and tested, including the DelFly Micro, the world’s smallest camera-equipped MAV, or the DelFly Explorer, the first autonomous flapping-wing MAV equipped with a stereovision system. All these designs were propelled by a pair of flapping wings, while being controlled (and passively stabilized) by a tail such as birds or men-made airplanes.
… or an insect
The latest design, the DelFly Nimble is insect-inspired instead. What does that mean? The Nimble has no tail, which would provide the damping needed for stable flight. Instead, it is stabilized actively, by adjustments of the motion of its flapping wings. This is what all flying insects and also hummingbirds do. Flies, for example, sense their body motions with their halteres, drum-stick like biological gyroscopes, and adapt their wing motion accordingly to stay balanced…. or to be agile, when someone is trying to swat them!
And while the Nimble was originally built just to demonstrate that an insect-inspired flying robot can be built, eventually we could also use it to learn more about the flight of insects:
Flapper Drones – how do they work?
The Flapper Nimble+ is the commercial (and enlarged) version of the DelFly Nimble, developed and produced by Flapper Drones. To our knowledge, it is the first, and so far the only hover-capable tailless flapping-wing drone available!
The thrust keeping the Nimble+ airborne is created by its four flapping wings, which flap back and forth horizontally, about 10 to 12 times per second.
The wing actuation mechanism allows to adjust the flapping frequency of the left and right wing pairs independently, which enables control of the roll rotation. Pitch rotation is controlled by adjusting the mean wing position within the stroke plane, which shifts the mean thrust force forward or backward with respect to the center of mass, and also introduces a stabilizing dihedral angle in forward flight. Finally, yawing motion is achieved by tilting the wing roots of the left and right wing pair asymmetrically:
Advantages of flapping wings
The use of flapping-wing drones such as the Flapper Nimble+ brings several advantages. Next to their attractive biological appearance, the soft flapping wings produce less intrusive, low frequency sound and are safer, compared to propellers. As the wings move back and forth, minor mid-air collisions are not a problem. The wings bounce off objects leaving no damage, and the drone keeps flying as this only represents a minor disturbance:
The aerial drag characteristic is also different and helps with precise indoor flight. As soon as zero attitude is commanded, the Nimble+ goes into halt in a matter of several wingbeats, making it an ideal choice for novice drone pilots as well as in constrained or cluttered indoor spaces. Finally, the flapping wings can provide additional lift force as they also glide in forward flight. This can improve the power efficiency by over 20%, compared to hovering.
Otherwise, Flapper Drones can be operated as any other drone, with vertical take offs and landings, quick maneuvers and flight in any direction:
Crazyflie Bolt & compatibility
The Flapper Nimble+ is powered by the Crazyflie Bolt 1.1, where the Bolt’s BMI088 IMU and STM32F4 MCU are suitable substitutes to the halteres and brains of the real fly. We made this choice, because this enables compatibility with most of the Crazyflie ecosystem, but also, because we felt the only way a Crazyflie would do justice to its name is if it had flapping wings😊
Currently, the Nimble+ uses a fork of the Crazyflie firmware, which is of course open source. Moreover, with the recently introduced platform functionality, we will be able to include the Flapper platform into the official crazyflie firmware very soon (expected still in July 2022). This means that the Flapper remains compatible with the official Python libraries, the PC client or the smartphone app. But also third-party projects like the Crazyswarm or the Skybrush should only require minor adjustments, if any, to operate a swarm of Flappers. Thus, for the existing Crazyflie users, switching from a Crazyflie to the Flapper should be a breeze!
The Flapper Nimble+ is hardware compatible with most of the Crazyflie expansion decks. While software support remains experimental (the Flapper Nimble+ is not a native Crazyflie product, after all), many of the decks work out of the box and others might need just minor firmware modifications. Would you like to fly the Nimble+ autonomously? Add an LPS or Lighthouse deck and you’re good to go!
For more details regarding deck compatibility, you can check this overview.
Applications
While the Nimble+ was originally designed for drone shows and similar entertainment applications, the open-source firmware and expansion decks enabling autonomous flight make it ideal also as for academic research and, in general, as a development platform. Are you researching swarming, and would you like to make your swarm even more bio-inspired? Are you developing new sensors, or new controllers (possibly even bioinspired), which you would like to test on a new type of flying platform? Are you interested in the aerodynamics of flapping wings, or the flight dynamics of insect-like flight? Or are you just curious and would you like to learn more about bioinspired flight? In all these cases, a Flapper might be what you are looking for!
The 114-g and 49-cm wide Flapper Nimble+ has been designed as a modular system where any part can easily be replaced. Flapper Drones provides all the spares, which are available upon request. If you are interested in using the Nimble+ for entertainment, rather than research, you can modify the appearance by creating your own body shells, which can also be illuminated by RGB Leds (a suitable interface and power supply is already integrated). Or even by altering the design of the wings. Finally, you can easily extend the Flapper with your own sensors, or other devices. Would you like to add a tail? A gripper? A perching device? This is all possible, as long as these additions fit within the payload limit of about 25 grams.
Available soon in the webstore!
Did you get (bio)inspired, and would you like to try an insect-like flying robot yourself? Then we have some good news! The Flapper Nimble+ will soon be available for sale in an exclusive partnership with Bitcraze and their webstore. Checkout the product description and leave your email address behind, such that you get a notification when the Flappers are in stock and ready to ship. The first batch of 10 units is expected to be available at the end of summer, so do not wait too long 😉
Want to learn more?
To learn more about Flapper Drones, you can check our website, or watch the talk I gave at the last miniBAM:
In the first years that I started at Bitcraze I’ve been focused mostly on embedded development and algorithmic design like the app layer, controllers and estimators and such, however recently I started to be quite interested in the robotic integration between the Crazyflie and other (open-source) projects and users. This means that I’ll be dwelling more often in the space between Bitcraze and the community, which is something that I do really enjoy I noticed during the Grand Tour. It also initiated my work with simulators which I think would be very useful for the community too. The summer fun project that I’ve been now working on is to integrate the Crazyflie with ROS2 to integrate standard navigational packages, which will be the topic of this blogpost!
ROS2 Crazyflie Node
So first I worked on the ROS2 node that actually communicates with the Crazyflie directly. I think many of you are familiar with the USC’s CrazySwarm project, of which the ROS2 variant, CrazySwarm2, is already available for most functionalities. Even though the name says CrazySwarm, this can be very easily used for only one Crazyflie too. The CrazySwam2 is currently under more development by the IMRClab of TU Berlin, but please take a look if you want to give it a go!
For now while Crazyswarm2 is still under development, I used the Bitcraze Crazyflie python library to make a more hackish node that just publishes exactly the information I want. I am focusing on the scenario with the STEM ranging bundle, aka the Crazyflie + Flowdeck (optical flow + distance sensor) + Multi-ranger (5 x distance sensors) combo, where the node logs the multi-ranger data and the odometry from the Flowdeck with the Crazyradio and outputs that into necessary /scan and /odom topics. Moreover, it also outputs several tf2 transforms that makes it possible to either visualize it in RVIZ and/or connect it to any other packages and it should react to incoming twist messages as well.
Development with a Simulator
And of course… I went in head first and connected it directly with the SLAM toolbox. I have worked with ROS1 in the past, but I had my first experience working with that package in the course: Build Mobile Robots with ROS2 (by Weekly Robotic Newsletter’s Mat Sadowski), so I couldn’t wait to try it on a real platform like the Crazyflie. However, tuning this was of course more work than I thought, as the map that I got out of it first was mostly a sparse collection of dots. Of course the SLAM toolbox is meant for lidars and not something that provided sparse range distances like the Multiranger. Then I decided to take one or two steps back, and first connect a simulator to make tuning a bit easier.
Luckily, I’ve already started to look at simulators, and was quite far in the Webots integration of the Crazyflie. Actually… Webots’ next release (2022b) will contain a Crazyflie as standard! Once it is out, I’ll write a blogpost about that separately :). As luck has it, Webots also has good ROS2 integration as well, and even won the ‘Best ROS Software’ award by The Construct’s ROS awards! Another reason is that I wanted to try out a different simulator for ROS2 this time to complement what I’ve learned in the ROS2 course I mentioned earlier.
So I used the webots driver node to write a simulated Crazyflie that should output the same information as the real Crazyflie node, so that I can easily hack around and try out different things without constantly disturbing my cats from their slumber :). Anyway, I won’t go into to the simulator too much and save that for another blogpost!
Simple Mapping
I decided to also take another additional step before going full SLAM, which is to make a simple mapper node first! This takes the estimated state estimate of the Crazyflie and the Multiranger’s range values and it creates an occupancy grid type map of it. I do have to give kudos to the Marcus’ cflib Pointcloud script and Webot’s simple mapper example, as I did look at them for some reference. But still with the examples, integration and connecting the dots together is quite some work. Luckily I had the simulator to try things out with!
So first I put the Crazyflie in an apartment simulator, flew around and see if any decent maps comes out of it and it seemed it did! Of course, the simulated Crazyflie’s ‘odometry’ comes from near perfect position estimate, so I didn’t expect any problems there (and in such a situation you would actually not really need the localization part of SLAM). This still needs some improvements to be done, like now range measurements that don’t see anything are excluded from drawing, but still it was pretty cool to map the virtual environment.
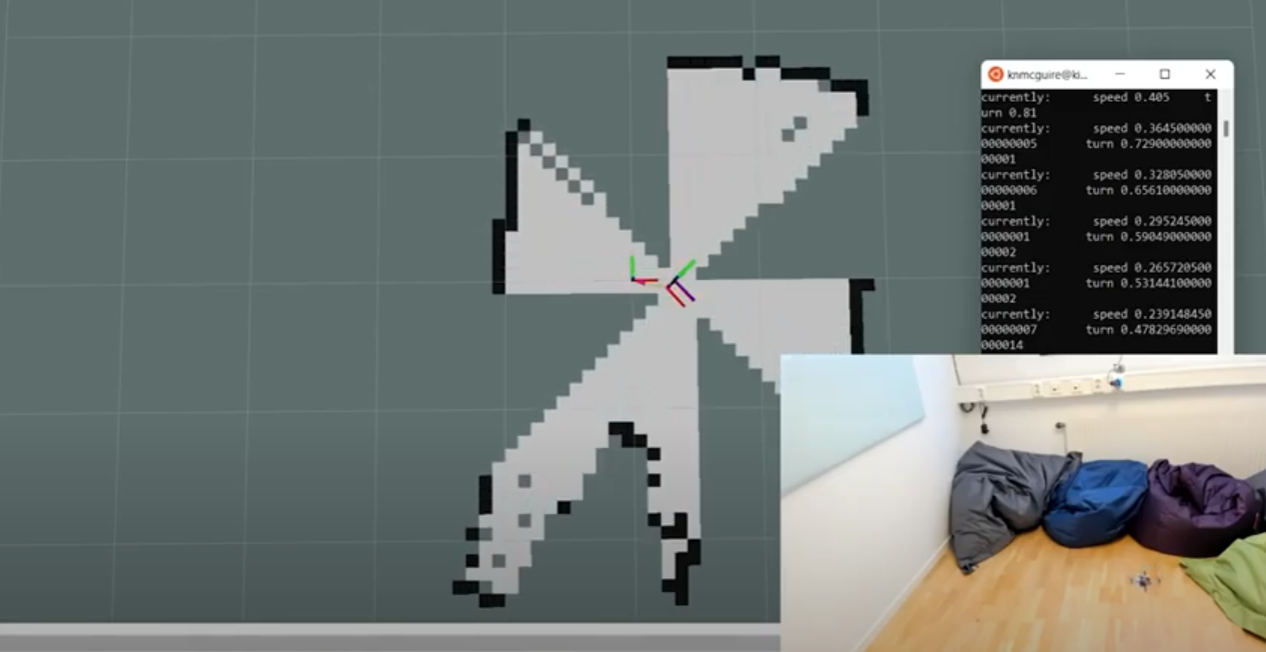
So it was off to try it out on a real crazyflie. In one of our meeting rooms, I had one Crazyflie take off, let it turn around with a twist message in a /cmd_vel topic and made a map of the room I was currently in. The effect of the 4 range sensors rotating around and creating a map in one go, makes me think of these retro video transitions. And the odometry drift does not seem as bad for it to be possible, but I haven’t mapped our entire office yet so that might be different!
What’s next?
So I’m not stopping here for sure, I want to extend this functionality further and for sure get it to work with the SLAM_toolbox properly! But if the simple mapper already can produce such quality, I’m pretty sure that this can be done in one way or the other. What I could also do, is first generate a simple map and already have a go at the NAV2 package with that one… there are many roads to Rome here!
Currently I’m doing my work on my personal Github account in the crazyflie_ros2_experimental repository. Everything is still very much in development, hackish and quite specific for one use case but that is expected to change once things are working better, so please check the planning in the project’s readme. In the mean time, you can indicate to us in this vote if this is an interesting direction for us to go towards. Not that it will stop me from continuing this project since it is too much fun, but it is always good to know if certain efforts are appreciated!
Our Ultra Wide Band (UWB) based positioning system, the Loco Positioning System, has been around for a long time and is still going strong! In this post we will tell you a bit about how it works (for those that don’t know about it yet), what research that is on-going in the field and new developments.
Crazyflie with Loco deck
Basics
UWB is using high frequency, low power, wide band radio where one of the most important properties is that it is possible to detect when a packet is received with very high accuracy. Combining this with very high frequency clocks, opens up the possibility to measure the time it takes for a radio packet to travel from a transmitter to a receiver. Since radio waves propagates with the speed of light in air we can convert the time into distance, and this is the basic idea in UWB positioning.
Not only is it possible to measure the timing of transmissions, the packets can also contain data, like in other radio standards. This property is extensively used to include time stamps of when a packet is sent, and also for instance the time stamp of when the transmitter received other packets or the position of an anchor.
This sounds pretty straight forward, but there are (of course) some complications. We will mention some of them but not go into the details.
Reflections – radio waves bounce around on walls and objects. Luckily, the nature of UWB actually uses this to its advantage and works better indoors than out side.
The clocks in the transmitter and receiver are not synchronized – the Time Of Flight can unfortunately not simply be measured by subtracting reception time from transmission time as the time stamps originate from two different clocks. The problem can be solved by sending some more packets back and forth though.
Packet collisions – two transmitters can not send at the same time, one or both packets will be lost. Transmissions must be scheduled or packet loss must be handled.
Obstacles – obstacles between the transmitter and receiver changes the transmission time.
Antennas – the propagation time through the antenna is substantial and changes depending on the angle to the transmitter/receiver.
Radio interference – other radio sources may interfere with the UWB radio signals and add noise or packet loss.
Modes
The Loco Positioning System can run in two fundamentally different modes: Two Way Ranging (TWR) and Time Difference of Arrival (TDoA).
Two Way Ranging (TWR)
In TWR the Crazyflie measures the distance to one anchor at a time, over and over again. Each measurement in initiated by the Crazyflie and requires 4 messages to be sent between the Crazyflie and the anchor, two request-response pairs. The position is estimated by pushing the measured distances into the kalman estimator.
This mode only supports one Crazyflie, but has the advantage of being very robust and also works pretty well some distance outside the system.
Time Difference of Arrival (TDoA)
In TDoA the setup is different, the anchors are transmitting packets while the Crazyflie is passively listening to the traffic. From the received information it is unfortunately not possible to measure the distance to the anchors, but what we can get is the difference in distance to two anchors. For example, we might know that we are 0.54 meters closer to anchor 3 than anchor 6, or similar. It is possible to calculate the position from this information and similarly to TWR the measurements are pushed to the kalman estimator for further processing.
This mode supports unlimited numbers of Crazyflies (swarms) but is less robust compared to TWR, especially outside the system. TDoA is similar to how GPS works.
Research
There are many researchers that use the Loco System, some use it as a positioning system and investigate topics like path planning or similar, while some others are looking at different questions related to the UWB positioning itself. We will not try to mention everyone, we probably only know of a small fraction of what is going on (please tell us!), but would like to point out two areas of research.
The first is related to improving the estimated position by handling measurement errors and the environment in a better way. Examples of this is to compensate for differences in reception angle or handling of obstacles in the space. We would like to mention Wenda Zhao’s work at the Dynamic Systems Lab, University of Toronto. He has contributed the robust TDoA implementation in the kalman estimator (blog post) as well as a public TDoA data set.
The second is inter drone ranging, that is measuring the distance between drones as an addition to, or instead of drone-to-anchor measurements. Examples in this are are the work by Dr Feng Shan at School of Computer Science and Engineering Southeast University, China (blog post) and professor Klaus Kefferpütz, Hochschule Augsburg, work on “Crazyflie quadcopter in decentralized swarming” as presented on the BAM days last year.
Experimental functionality
Even though there has not been a lot of code committed lately in our repositories related to the Loco Positioning System, it has been simmering in the background. We would like to mention what is cooking in the pots and some of the stuff that has been discussed or tested.
System size
An 8 anchor Loco Positioning System can cover a flight space of around 8×8 meters, but from time to time we get the question of larger systems. TDoA3 was designed with this in mind and supports up to 255 anchors, which in theory would make it possible to build larger systems. This functionality was implemented 4 years ago but we never really tested it(!). Finally we collected all anchors in the lab an set up 20 anchors in the same system, and it worked! This should make it possible to extend systems to at least 15×15 meters, but maybe even more with some clever radio cell planing.
Another possibility to enlarge a system is to tweak the radio settings to make them reach longer. There is a “Longer range” mode in TDoA3 that lowers the bit rate, but again it has not really been verified. This was also tested in the latest Loco frenzy and with some minor modifications it worked the way we hoped, with 20 anchors! The tests mainly verified that the anchors play nicely together, and we are not sure about the maximum range (to be tested) but we believe distances of up to 40 meters between anchors is possible. To use this feature you should make sure to use the latest firmware for the Loco Nodes as well as the Crazyflie.
The two features mentioned above should hopefully make it possible to go big and we hope it could be used for shows for instance.
TDoA3 hybrid mode
If one looks at the messages sent in a TDoA system, the anchors are actually doing TWR with each other, while the Crazyflie(s) are just listening to the traffic and that the possibility to extract the position is a nice “side effect”. Now imagine if the Crazyflies were to send some messages from time to time, then they could act as “dynamic” anchors, or do inter-drone ranging with each other. This is something we call TDoA3 hybrid mode.
Currently there is no official implementation of the Hybrid mode, only some experimental hacks. Some researchers have done their own implementations, but we hope, at some point, to generalize the functionality and integrate it into the firmware.
Read more
If you are interested to read more about positioning and the Loco system, you can take a look at the following link list.
Summer is coming and with that vacations, yeay! There will always be someone at the office to help you if you need help, and we will handle shipping through out the summer, but it might take a bit longer than usual.
Earlier this month, ICRA 2022 was in held in Philadelphia and in person this time! Unfortunately we were unable to attend ourselves but quite happy that there were still virtual attendance options available. So I followed quite some presentations and read through papers, trying to find out the latest in Aerial and Swarm robotics and if anybody was able to use the Crazyflie to good use for their research. I even had the opportunity to attend the Exhibition floor with a telepresence robot, which was a lot of fun!
We have covered IROS 2021 end of last year, and we even have started to publish Crazyflie related publications on social media to keep ourselves and the community up to date with any Crazyflie research work. So here we will list the ICRA 2022 papers we have found and write some observations.
Crazy Platforms
What I really noticed this year is that the Crazyflie has been used in more unconventional configurations and new platforms! IROS 2021 ready amazed us by a solar-powered Crazyflie and the 4 times Crazyflie combined quadcopter (which continued this conference by UCLA in (2). But we haven’t seen yet that a Crazyflie can jump! The PogoDrone by the Swarmslab of Lehigh university turned the Crazyflie into an autonomous jumping pogo stick (5)! Moreover, wheels were added by the Institute For Systems and Robotics (TU Lisbon) for increasing the flight/autonomy durability (7).
We also noticed 3 ICRA 2022 papers with Bolt-powered platforms, which is a huge increase compared to IROS 2021 which only had 1 Bolt entry. The MAVlab of the TU Delft compared the Crazyflie against a Bolt-powered Flapper-drone for flying against wind (see the presentation of Flapperdrone in our last MiniBam). Moreover, remember that saw the Science Robotics paper using a Crazyflie board for a dual wing rotating platform. The Engineering product development of SUTD took a similar design to the next level, building a single controllable rotating wing with a Bolt platform (3). Two of these can even work together cooperatively and fly stability, so it is no wonder that they won the ICRA 2022 Outstanding Dynamics and Control Paper Award.
List of ICRA 2022 Papers featuring the Crazyflie and Bolt
Here is a list of all the Crazyflie/Bolt papers featured in ICRA 2022 but let us know if we are missing any (⚡: Bolt, 🐝: Crazyflie). Mind that only Robotic and Automation Letter entries have been officially published on IEEE Xplore already, so from the proceeding papers I tried to share the ArXiv paper if available.
⚡ ‘Passive Wall Tracking for a Rotorcraft with Tilted and Ducted Propellers using Proximity Effects’ Ding et al. from City University of Hong Kong & Massachusetts Institute of Technology
⚡x2 ‘Cooperative Modular Single Actuator Monocopters Capable of Controlled Passive Separation’, Cai et al. from Singapore University of Technology & Design
🐝x 6 ‘Formation-containment tracking and scaling for multiple quadcopters with an application to choke-point navigation’, Su et al. from The University of Manchester.
11. 🐝x 6 ‘Nearest-Neighbor-Based Collision Avoidance for Quadrotors Via Reinforcement Learning’, Ourari et al. from TU Darmstadt – ArXiv
12. 🐝x 6 ‘Safe multi-agent motion planning via filtered reinforcement learning’ Vinod et al. from Mitsubishi Electric Research Laboratories – IEEEXplore page
13. 🐝 ‘Event-Triggered Tracking Control Scheme for Quadrotors with External Disturbances: Theory and Validations’, Goa et al. from University of Shanghai for Science and Technology – Outstanding Coordination / Mechanisms & Design / Locomotion / Navigation Award Finalists – IEEEXPlore page
14. 🐝 ‘Watch and Learn: Learning to control feedback linearizable systems from expert demonstrations’, Sultangazin et al. from University of California – IEEEXplore page 15. ‘KoopNet: Joint Learning of Koopman Bilinear Models and Function Dictionaries with Application to Quadrotor Trajectory Tracking’, Folkestad et al. from Caltech – IEEEXplore page
Other Announcements: Bolt 1.1 and Dev meeting
Bolt 1.1
The Bolt is now back in stock and with two small updates making it the Bolt 1.1. Here are the changes listed:
The board thickness has been reduced from 1.6mm to 1.0mm to save some weight, roughly 2 grams. This is handy for the slimmest and most lightweight designs.
Motor signal output M4 has been moved from PB9 to PB10 to be able to support the DSHOT motor signal protocol in the future.
Other then that it is fully backwards compatible but make sure to use a recent enough firmware (2022.03) that has the Bolt 1.1 device support added.
Time and Date for Dev Meeting
In this blogpost we noted that we wanted to organize our first Developer meeting before the summer break. From this poll we saw that most of you that want to attend are currently located in Asia and Australia, so that is why this time we want to organize the meeting at:
13:00 CEST (Sweden time) on Wednesday 22th of June.
The topic will be about our new support platform and support handling in general, so I’m hoping for some fruitful discussions about that. Keep an eye on this discussion thread for any details for joining.
Hello everyone, I am Marios from Greece studying towards my MSc in Electrical and Computer Engineering at the University of Patras.
Marios
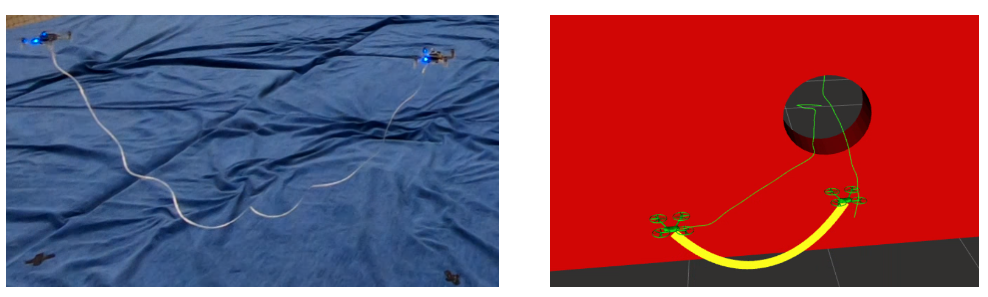
Since last year I have been working on the Collaboration of 2 Crazyflies into handling flexible objects in collaboration with the Robotics and AI group at the Luleå University of Technology, Sweden and the University of Patras, Greece. In this research the aim was to utilize a link like rope, that was attached below them and to navigate the vehicles in tight spaces or moving obstacles, while keeping a successful lift
Real Life Experiment Visualized Trajectories
I am also a member of the UoP Racing Team from the University of Patras where we build an Electric Formula car in order to compete in the worldwide Formula Student competition. My responsibilities include the development of the code for the ECU and the other peripheral microcontrollers communicating with the whole car.
During this summer I will be working on improving and updating the Autonomous swarm demo by adding dynamic collision trajectories for each crazyflie and then hopefully making it completely autonomous without the need of a Master PC using the already implemented peer to peer protocol (P2P).
I would like to thank all of the people here and I am very excited to be part of this amazing company!
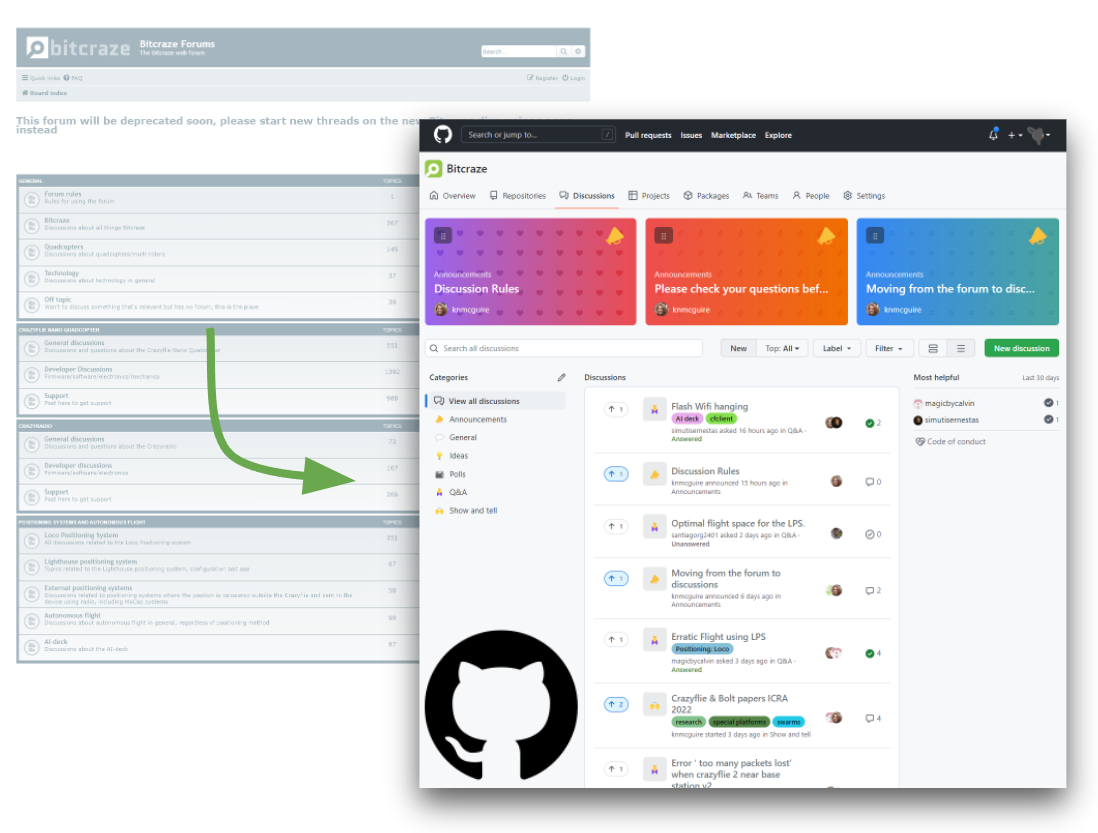
We have already announced it a bit on social media, but in this blogpost we are announcing it officially: we are moving our support to Github Discussions which can be reached by going to discussions.bitcraze.io. We will deprecate our old forum and lock it for new thread creation and user registration starting from week of the 6th of June.
Don’t worry! We don’t have any plans of removing the actual content of the old forum as this is much too valuable for support. But for most communication, support and discussions, we will only be using Github Discussions.
The Reasoning
Technically, there is nothing really wrong with the old forum! Bitcraze has used this phpBB-based platform ever since 2013 and has helped tremendously in support in all those years until now. For a long while, it also has been an active sharing medium next to support, where users could share their cool Crazyflie projects. So it was more than a support channel… it was a community watering-hole! Unfortunately, the backbone of the forum has not progressed in functionality, the categories style defeated it’s purpose and we found we had to constantly switch back and forth between the forum and Github issue list on a daily basis. So we have decided it is time for something else.
Moreover, the last few years we have noticed that the sharing of cool projects became significantly less, no more discussions were initiated and the forum was mostly used for only support and questions. As we missed seeing cool projects and discussing the Crazyflie (also due to Corona), we tried to open up a Bitcraze Discord channel (see this blogpost) to initiate more discussions and sharing as a supplement to the forum. Unfortunately, it did not really take off in terms of activity, and the content is not searchable without a discord account. After a unfortunate hack-attack last year we removed the invite link from our website.
We did get feedback that having 2 platforms separated for support and community was confusing to the users, as they didn’t know where to ask a question anymore. The ideal situation would then to be choose another platform where we can have all on there. Discourse we had our eyes on for a while, which has been used by other open source projects, and has integration support for Github so users didn’t have to make yet another account. Github itself introduced their Discussions feature 1.5 year ago and it was adopted by Crazyswarm (1 and 2). At that time it was only possible to have one discussion tab per repository, and with our 60 (!) repos this didn’t seem to be an option… until recently! Once they released their organization level discussion feature about a 1.5 months ago, we were sold. There is no better Github integration than being on Github itself and with our many repos, this is something we definitely need.
How to use Discussions?
The forum and discussions are quite different in style which takes a little getting used to. The old forum used a classic ‘thread’, which shows exactly the chronological way of the conversation. Discussions uses an approach similar to Stack Overflow, where you can also reply on intermediate answers in that thread.
Where to start a discussion?
If you see the discussion page, you notice a couple of categories. These are still the standards as given by github, but we think these will work for us as well:
Announcements: Here is where Bitcraze places announcements in regards of discussions. You can not add announcements yourself but you can reply to them, but do not start a generic support question here.
General: Just for generic discussions and saying hi!
Ideas: If you have any ideas for enhancements for the Bitcraze ecosystem, place them here!
Polls: Same as announcements from Bitcraze, but we will use these to poll a certain opinion.
Q&A: Here is were all the support questions go! Make sure to read the support rules for this.
Show & Tell: Show your awesome Crazyflie projects here!
Labels
We first had categories at the forum, which was supposed to separate the discussion in a functional way. In reality, sometimes it was difficult to really separate the issues in those very categories as it overlapped many functionalities. Now in Github discussions, we are able to label these based on the topic, and even add more labels if it indeed overlaps multiple topics. From this, we will also be able to filter out support question about a certain topic which will make it easier for us to have a good look of all support for a certain product or functionality.
So please try to label your support question! But if you haven’t, we will probably do it for you.
Issue or Discussion?
Especially since we are on Github discussions, it might be difficult now to determine when to start an issue at an individual repository and when to start discussion. I really like the explanation that Github itself used to explain the difference:
Discussions are great for questions and ideas that require team communication to make a decision, while Issues are defined pieces of work.
So if you know of a bug/problem, or you want to to propose an enhancement that you know the specific repository of, go ahead and make an issue right in that repo. If you have a problem and you are not sure what is causing it, discussions is the place to go (preferably in Q&A). If there is any ‘pieces of work’ that comes from that discussion, the maintainer can generate an issue in the related repository and link it to the discussion. Other way around, any questions in any issue list that we think is too generic, we will moderate and move it to the organization discussions.
Get involved!
Of course at Bitcraze we will try to help out, but what we really would like is for you to help with answering questions as well! Start up and chat with a topic that you are interested in, or show a small video of your Crazyflie doing something fun. One thing that we would love is the community to be as vibrant as it used to be, were we not only ask support questions, but to discuss and share! It doesn’t have to be big, like you can vote on this Poll to voice your opinion about our move, or vote up / add a smiley to any discussion that you find important.
Also we are planning to have a developer meeting in a few weeks, on the 22nd of June (just before the holidays), so please see the discussion/poll here for more information.
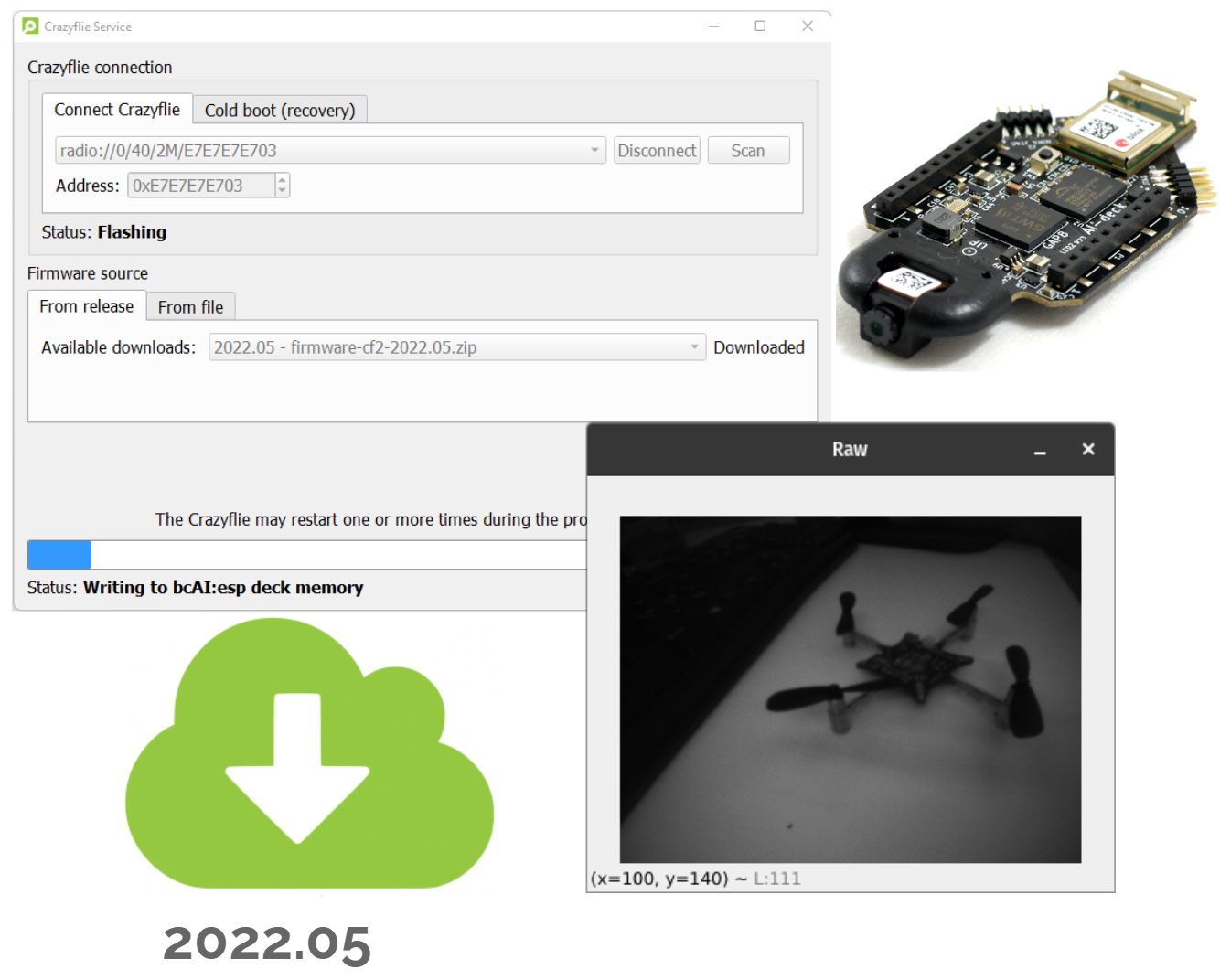
We have worked hard last week to get a new fresh release out before the summer months are on our doorstep. Not only that we would like to make sure that important bugs are fixed before some of us go on our holiday, but also to be able to display our new AI deck features! Here is an overview of what has been changed
AI deck over air flashing
As you can probably see in the release notes of both the python libraries and the firmware, most of our changes are focused on making it possible to develop for the AI deck without using a programmer all the time. If the STM and NRF firmware of the Crazyflie is fully updated, and the ESP firmware on the AI deck, it should now be possible to flash an AI deck example binary with a Crazyradio! For older versions of the AI deck 1.X (Rev A to C) it is unfortunately still necessary to use the JTAG programmer one last time to flash a bootloader on the GAP8, but after that it should not be needed anymore.
In the light of the work we have done for the AI deck, we also have started to implement a new, inter MCU protocol called the Crazyflie Packet Exchange. Since with the AI deck, we are adding 2 additional microprocessors to the Crazyflie architecture, it was crucial to handle the communication between all platforms and communication channels properly. Currently the functionality is mostly enabled to tailor Wifi streaming and console printouts for the AI deck, but it is meant to be a generic protocol which in the future, should be able to handle more combinations like for instance, command messages through wifi?
For the last part of the Grand tour trip, we had a hackathon with the IMRC lab of TU Berlin and our close collaborator Wolfgang Hönig, in which we managed to convert the PID controller, Mellinger controller and the motor mixing into python bindings, which can be used in the experimental simulator of the Crazyflie.
There is no Pypi release of these, you will need to pull the latest crazyflie-firmware repo and build the bindings with ‘make bindings_python’
Additional fixes
We have some additional fixes to both the python libraries and firmware. For the STM we have updated the STD peripheral library and solved several build issues. For the cfclient, we fixed a lot of issues that were caused by either the latest version of python, as it was more stricter with type definitions, and some issues QT. Moreover, the LED ring headlight functionality has been restored, and the cfbridge.py script, used for the PX4 crazyflie 2.1 tutorial, is re-added, since it suddenly disappeared a few releases ago.
Update and Feedback
Make sure to update your cfclient with ‘pip install cfclient –upgrade’ and to reflash the new stable firmware. For AI deck users, try out our our new tutorial to try out both CPX, the over air flashing and the wifi example. The new AI deck functionalities has been subjected to some limited testing so if there is anything wrong or unclear, please let us know in the forum! The feedback will help the AI deck to become a more stable product for development, so we would be very grateful if you would be able to help out with that.
Since the pandemic, having a close relationship with our contributors, partners, distributors and generally speaking, users, have been a challenge. We tried to keep in touch as much as possible, by organizing our own conference, visiting labs in Europe, or asking for feedback.
Now that it seems the situation has gone back to almost normal (and I’m crossing all my fingers as I’m writing that, which makes typing difficult), we have exciting plans for the coming months for getting closer to the community. Here are some of the things we are cooking up:
Mini BAM
The closest one is actually next week ! We are hosting a short webinar where 2 of our close collaborators will present what they’ve been working on. Matěj Karásek from Flapper Drones will talk to us about his Bolt-based drone, that is set up with flapping wings. We got to try it out in our lab last week, and it looked amazing: we’re excited you’re getting a look too!
Matej will be followed by Gábor Vásárhelyi from Collmot that will introduce us to Skybrush, its platform for any kind of swarm/fleet/multi-UAV mission control.
We’re really grateful that Flapper Drones and Collmot will join us for our very first Mini Bam to talk about drones in show! Here are the details:
It starts at 15.00 CEST on May 18th.
If you’re interested in joining, please fill out this form, or contact us at contact@bitcraze.io. You’ll get an invitation to join the webinar.
After 2 years of online or hybrid conferences, we’re really excited to join the next one. And it’s a big one: IROS 2022, which will be held 23-27 october in Kyoto, Japan. We’re actually so excited about it that the whole company should be joining, if logistics and Corona let us. The situation in Japan is still uncertain, the country being still closed for tourism, but we are optimistic and hope for a week full of conference, meeting new people, and of course discovering a beautiful city all together. We’re planning on having a booth there, so if you plan also on visiting IROS, be sure to pass by and say hello !
We’re hiring
Of course, all of those plans take time… And we’re a little bit short on that, since (as I maybe mentioned before) we’re a little short handed right now. With only 6 people at Bitcraze, we’re getting frustrated: we have many projects, and too little time to work on them ! That’s why we have begun actively looking for a new Bitcrazer to add to our ranks. A job offer should be posted soon on our page: if you’re interested, keep an eye out for this, and be sure to let us know if you fill the profile (or someone who does!). We know it will be a long process to find the right fit for us, but we’re hopefully we will discover the person that will help us achieving all those plans – and even more!