Marcus and I are going to visit FOSDEM 2025 at the end of the week. This is a great open-source conference that I visit every year but this year there is a twist: I am part of the organisation of the Robotics and Automation devroom! I am going to give the welcome talk there:
FOSDEM is a conference with many tracks, the main track and devrooms. Devrooms are like mini-conferences: they are handled by a committee that produces a call for participation and handles the schedule for the room. FOSDEM allocates a time slot, a physical room, and video recording for the devroom so that all talks are broadcasted in real-time and recorded.
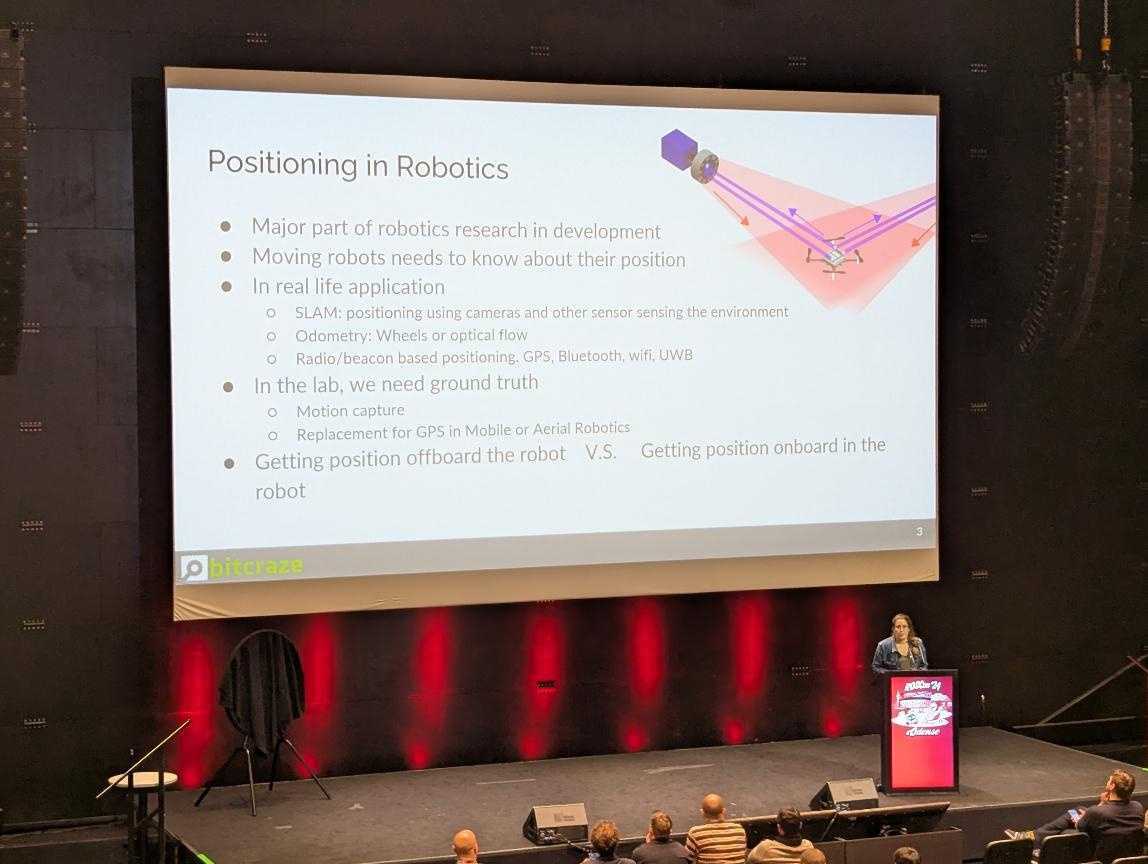
Since my first visit to FOSDEM in 2015, we have been thinking about the lack of a dedicated devroom for robotics: a lot of robotics, at least in research, is open source. This is in part thanks to ROS, which allows for easily sharing modules and algorithms between projects, but it also applies to things like flight stacks that are often open-source. So we took it upon ourselves to organize what we wanted, a robotics-dedicated devroom.
We started last year, at FOSDEM 2024, by organizing a robotics Bird of Feather with Kimberly. These are impromptu meetups that can be organized by booking a time on the spot for a couple of dedicated rooms. There, we had some really nice discussions with fellow robotics enthusiasts and figured out that there was indeed quite some interest in robotics at FOSDEM and that we were enough interested parties to organize a devroom.
If you’re interested in open source and/or robotics and you can be in Brussels, Belgium, on the weekend of the 1st and 2nd of February 2025, please join us! The Robotics and Simulation devroom is on Sunday afternoon. I will also be monitoring our Mastodon channel more carefully, so do not hesitate to poke me if you want to meet either me or Marcus, as we will be at the conference both days.