We talked about it before the summer, and it’s finally here! The 350 mAh battery is now available in our shop. It implies some changes in the products we offer, so here is a breakdown of what’s new:
It is more powerful than the 250 mAh battery that comes with your Crazyflie. We based it on the Tattu 350mAh 3.7V 30C 1S1P but with some custom works like gold connectors, tailored wire length, and awesome Bitcraze graphics on it. On top of the added power, the upgrade has higher capabilities, (30C burst current, which is more than 10 Amp) and higher energy density (~130 Wh/kg instead of ~105 Wh/kg). It all means that this could boost your hover time up to 10 minutes, and you’ll have more punch during acceleration! It is, though, more expansive than the 250 mAh.
The pin headers
The 350 mAh is thicker than the stock battery, which means you would need longer pin headers in order to snug it onto your Crazyflie. For that, there are now 9mm pin headers available in the shop. This means that now, you can get 3 different male connectors:
the 8+14mm is the one that comes with your Crazyflie kit. It’s meant to be phased out at some point. It allows to fit 1 or 2 decks and the 250 mAh battery.
the 9+15mm is slightly longer and is available in the shop – both as a spare part and in the upgraded battery bundle. It allows to fit 1 or 2 decks and the 350 mAh battery.
the male long connector: the longest pin of all, it’s the one that allows you to fit 3 decks.
Since it makes more sense to have slightly longer pins, the male connectors as spare parts are now slightly longer ones than those you get in your Crazyflie kit.
If you’re not sure, you can always buy the upgraded battery bundle that offers the 350 mAh battery with the right pin headers.
Bundles
The 350 mAh battery is much more suited for swarms than the 250 mAh, that’s why we’re planning on having an upgraded offer for our swarm bundles. In the coming week, both the Lighthouse and the Loco Swarms will be fitted for the updated offer. That would mean that it will include the new batteries with the right pin headers as well – there will be a slight price increase to match the price of the batteries.
Bare PCB
But that’s not the only surprise waiting for you in the shop: you can now also buy a spare Crazyflie PCB! We thought it would be good to have this option in the store – in case you have crashed too many times and you only just need the PCB!
Right now, it may seem a little confusing, between our different propellers, batteries, or pin headers. It’s mainly because we are trying to, slowly, build up a better, upgraded offer – which will, eventually, culminate in an upgraded Crazyflie 2.1, where the 47-17 propellers and the 9mm pin headers are standards. We’re also planning to publish a guide to help you quickly figure out what would best suit your needs!
Today, Suryansh Sharma from TU Delft presents the open-source Gimbal they devised. Enjoy!
Crazyflies (and other drones in this weight class) are extremely fun to fly and prototype with! But if you are also a scientist or tinkerer and not a well-skilled drone pilot then you might struggle with flying these platforms especially when testing new control loops or experimental code. While crashing also teaches a lot about the behavior of the system, sometimes we are interested in seeing the system dynamics without breaking the drone.
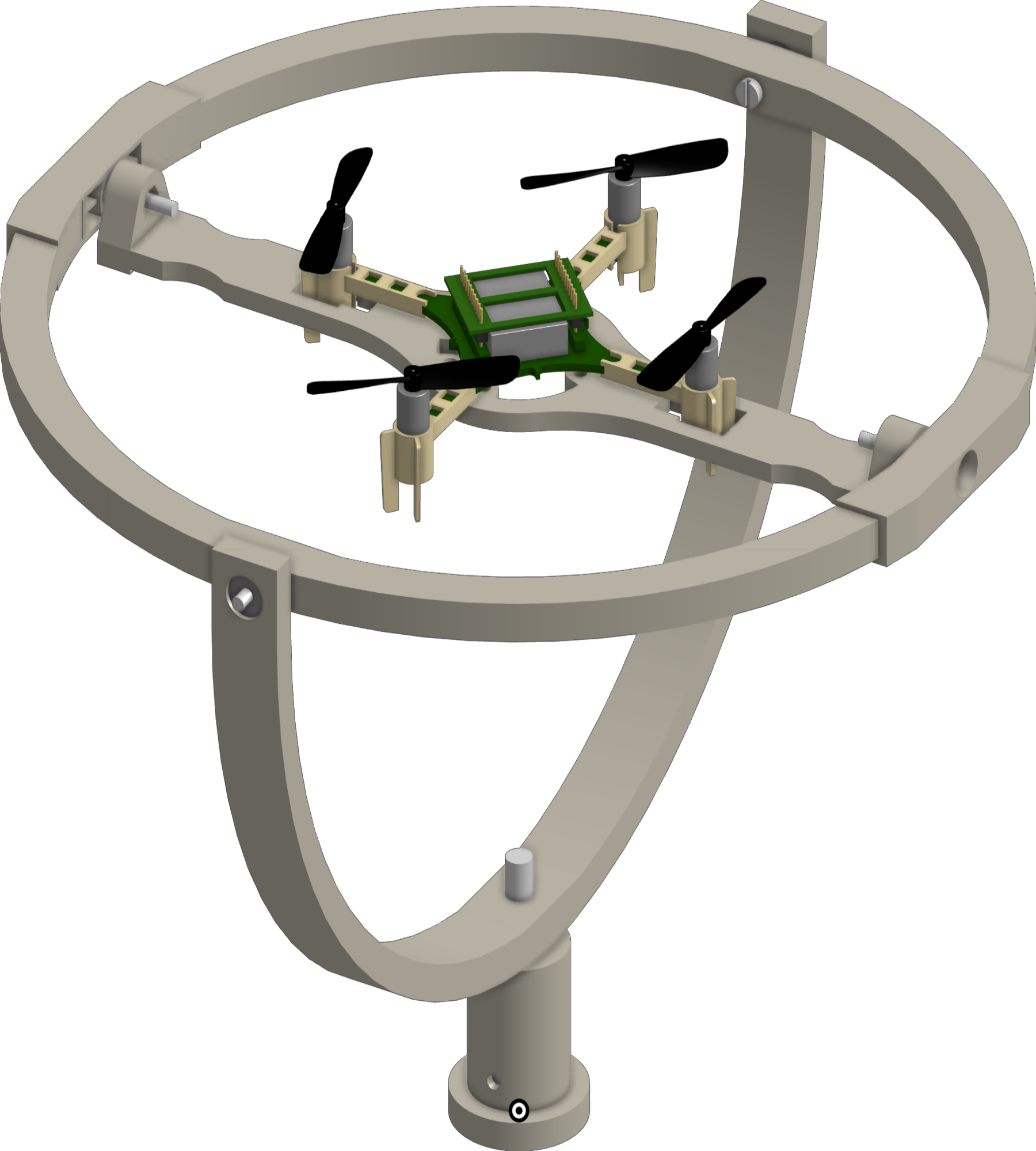
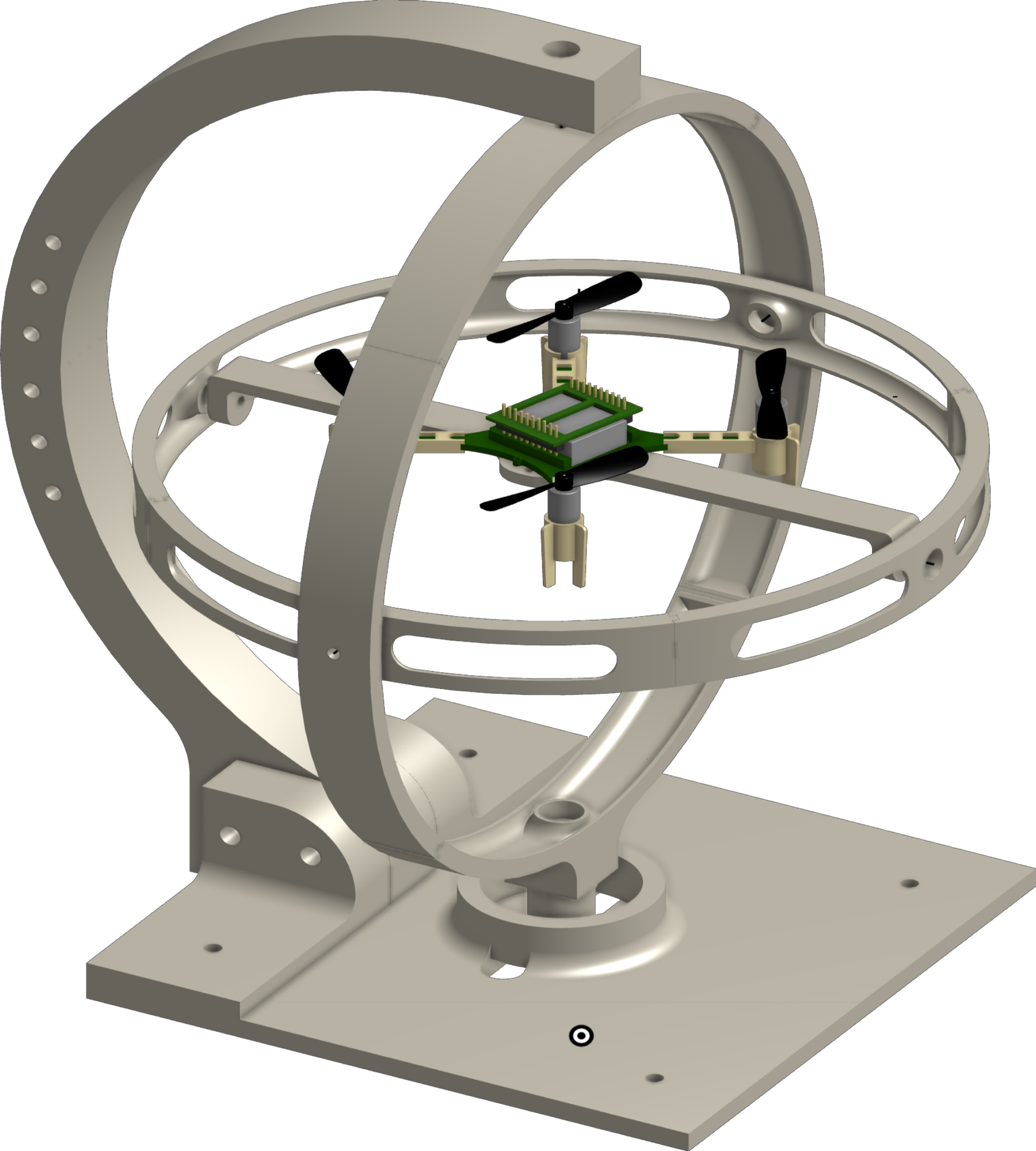
Currently, doing this for such small drones is not easy. We need something lightweight and still accessible. To solve this, we made Open Gimbal: a specially designed 3 degrees of freedom (DoF) platform that caters to the unique requirements of these tiny drones. We make two versions, (a) Tripod version which can be mounted on a camera / light tripod with a screw thread of sizes 1/4-20 UNC or 3/8-16 UNC (b) Desktop version which can be placed on a table top.
Tripod VersionDesktop VersionCAD models of the different Open Gimbal versions you can 3D print and use.
Our approach focuses on simplicity and accessibility. We developed an open-source, 3-D printable electro-mechanical design that has minimal size and low complexity. This design facilitates easy replication and customization, making it widely accessible to researchers and developers. The platform allows for unrestricted and free rotational motion, enabling comprehensive experimentation and evaluation. You can see the movement from the CAD version below:
Degrees of Rotational freedom that Open Gimbal provides
You can also check out the interactive CAD model and see how the gimbal moves here. All of the 3D model files as well as the BOM and instructions for assembly can be found in our repository here.
In our publication, we also address the challenges of sensing flight dynamics at a small scale. To do so, we have devised an integrated wireless batteryless sensor subsystem. Our innovative solution eliminates the need for complex wiring and instead uses wireless power transfer for sensor data reception. You can read all about how we do this in our paper here.
If you do end up using the platform for research then you can cite us using the details below:
@ARTICLE{10225720, author={Sharma, Suryansh and Dijkstra, Tristan and Prasad, Ranga Venkatesha}, journal={IEEE Sensors Letters}, title={Open Gimbal: A 3 Degrees of Freedom Open Source Sensing and Testing Platform for Nano- and Micro-UAVs}, year={2023}, volume={7}, number={9}, pages={1-4}, doi={10.1109/LSENS.2023.3307121}}
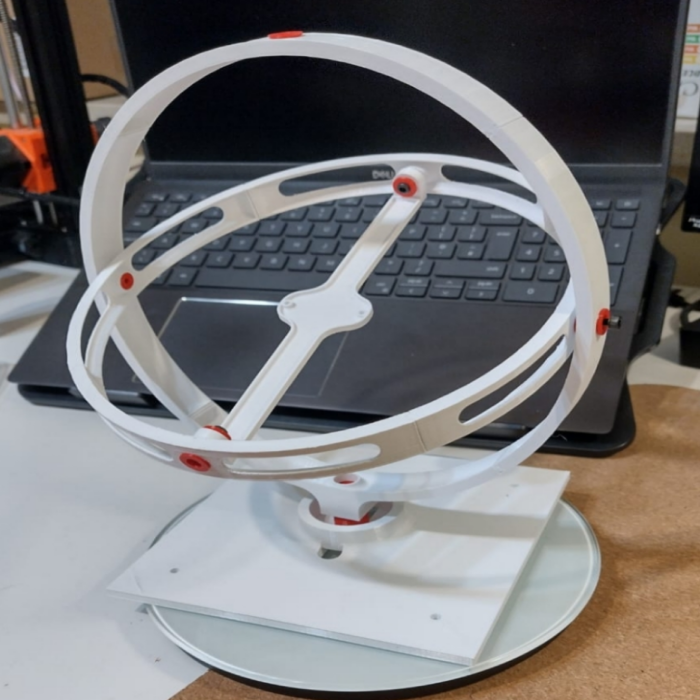
Open Gimbal at European Robotics Forum 2023 in DenmarkOpen Gimbal in use at Prof. Leszek’s lab in PolandOpen Gimbal at TU Delft, NetherlandsOpen Gimbals with Crazyflies mounted in the wild!
I hope that you find the Open Gimbal useful! Feel free to reach out to me at Suryansh.Sharma@tudelft.nl if you have any ideas/questions or if you end up making an Open Gimbal yourself!
After a nice (but rainy) summer, everyone is back at the office and we’re coming back to business as usual at Bitcraze. This blog post is dedicated to various bits of news, in order to get you caught up on what’s been happening during the summer.
Dev meeting theme
There were no dev meetings in August to allow everyone to rest and enjoy their vacations, but after this hiatus, we’re back in the saddle! The dev meeting will happen, as usual, on the first Wednesday of the month, so the 6th of September, at 15.00 CEST.
This month, Arnaud is going to talk about the lib: what is its current status, its architecture, and some hopes we have for the future. As usual, we’ll have a short presentation, and then a discussion; you can also join if you have more general questions or feedback. If you’re interested and willing to take part in this discussion, you can check the information on Github: https://github.com/orgs/bitcraze/discussions/884
Chargers out of stock
Some items were out of stock during the summer (like the HQ propellers) that we thankfully received soon after we came back. Unfortunately, one product is still not available: the battery charger. Since it’s part of the Swarm bundles, it also means that the bundles are out of stock too. But the wait for their restocking shouldn’t be too long, as they are scheduled to arrive around the end of next week. We’re hoping it’s not a big inconvenience for you and we thank you for your patience!
Problems with payment
We’ve noticed that some of you had some problems getting their payment through in our shop. If you’re one of the unlucky ones who faced this issue, we apologize for the inconvenience, and we want you to know we’re working with our payment provider to figure out a solution. This, unfortunately, can take some time because of the number of parties involved (there’s us, the payment provider, different banks, so the situation gets quite complex quickly). In the meantime, if you should encounter such a problem, don’t hesitate to send us an email at contact@bitcraze.se and we can help out. It would also help us to know who is facing this issue.
As of this year around March/April we started with both Bitcraze developer meetings and Aerial-ROS meetings (the latter in collaboration with Dronecode Foundation). Now that summer is around and our office is a bit empty, we had a bit of a summer break, however we will start the meetings back up again soon! The next ROS-aerial meeting will be on the 16th of August and we will also have a Bitcraze developer meeting planned on the Wednesday the 6th of September (keep an eye on our announcements in discussions). In this blogpost we like to take the opportunity to show an overview of the meetings we had so far.
Aerial ROS meetings
In March we started a [ROS community working group] for aerial Vehicles together with our friends at Dronecode foundation, aka Aerial-ROS! We have biweekly meetings with some standard discussion meetings (with a topic) and with an invited guest presentation.
We already had a couple of developer meetings before but we started recording them since April. The first recorded one was about the loco positioning system. Here first we gave a presentation about the system itself, with the latest developments cooking in our pot and time for questions afterwards.
Dev meeting about Loco positioning.
Then we had a meeting about the development of safety features in the Crazyflie in light of the Bolt developments:
Bitcraze Dev meeting about Safety features.
Then we had a meeting where Kristoffer highlighted the autonomous swarm demo we showed at ICRA 2023.
Bitcraze dev meeting about the autonomous swarm demo
And the last before the summer holiday, we had a meeting where Kimberly explained about the Crazyflie simulationmodel intergrated into Webots
Bitcraze Dev meeting about Simulation
We are still planning to have developer meeting every first wednesday of the month starting with September 6th (keep an eye on our announcements in discussions).
EPFL 101 Crazyflie presentation
Oh yeah, by the way, we also were invited by the EPFL-lis lab to give another Crazyflie 101 presentation in Lausanne last April! We made a prerecording of it so you can check it out right here:
Today, Lennart Bult from Emergent Swarns presents us with this project of a 24/7 swarming demo. Enjoy!
Over the last few months our team has been working on creating a 24/7 swarming demo. Initially tasked by Guido de Croon and Chris Verhoeven from TU Delft MAVLab and the TU Delft Robotics Institute, we set out to find our way within the Crazyflie ecosystem to gradually increase the size and capabilities of the swarm. In this article we will first talk about some of the work and methods that we used. After that, we will introduce the TU Delft Science Centre Swarming Lab and talk about some applications of swarming drones.
Developing the 24/7 swarm
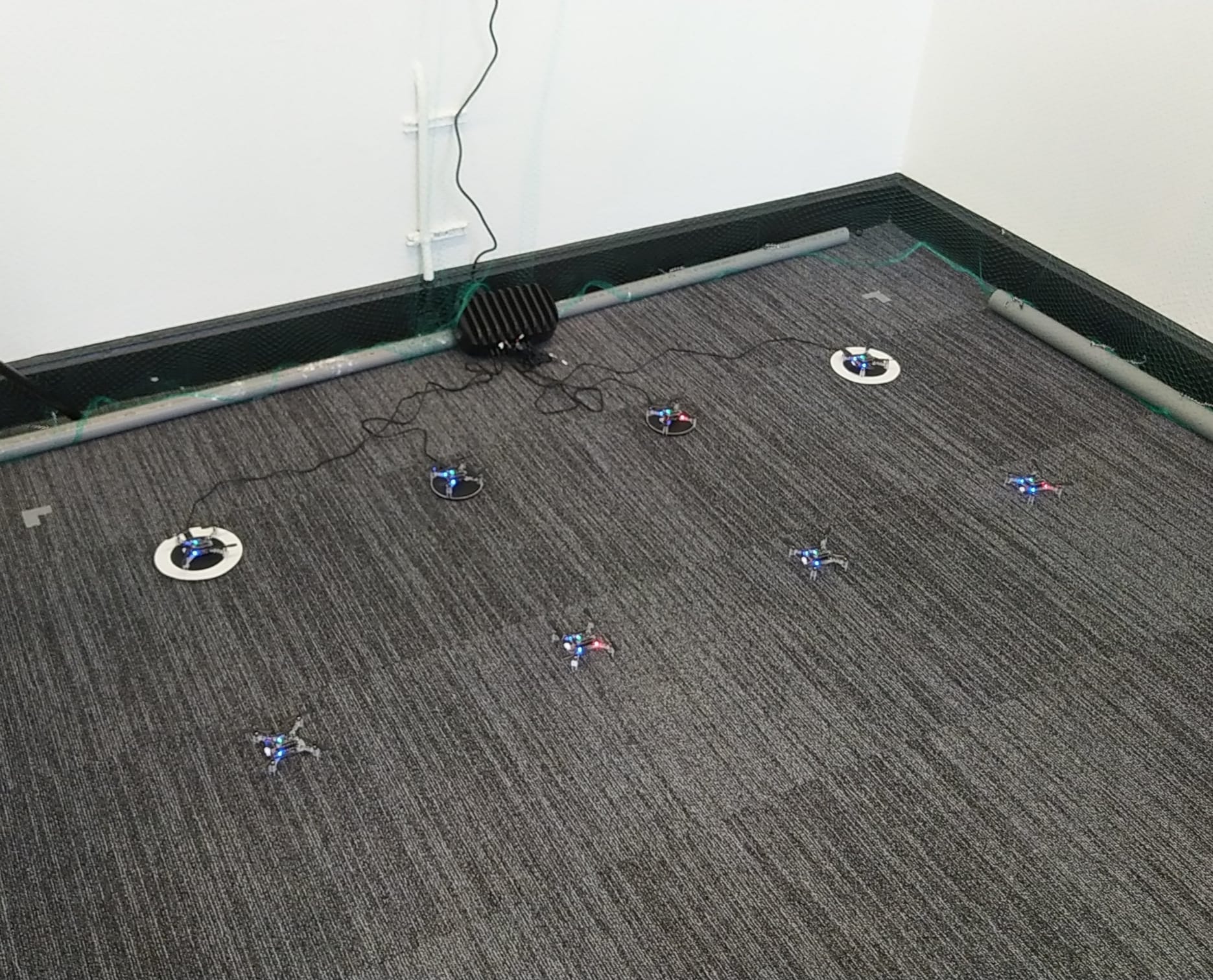
The project started in February with the goal of creating a physical swarm capable of real-time collision avoidance with drones and static obstacles. We started out with three drones equipped with the Flow Deck, and by setting them up in a clever way we could perform the first collision avoidance and landing tests. We were impressed with the performance we got out of the Flow Deck, however, eventually, it is mostly a battle against the drift of the position estimate, that is, we could increase some of the margins on the collision avoidance only so far before we would either fly out of the test zone or collide with another drone. Luckily with short test flights, we were able to see some of the flaws in our algorithms and correct them before testing with the new setup.
Setup after the first expansion to eight drones.
After a few weeks of testing we got approved for the first swarm expansion, five more drones and a Lighthouse positioning setup. This is when we could do our first real tests with the collision avoidance algorithm, which, much to our own surprise, worked on the first try. This is also when we first posted a project update on LinkedIn. There were however a lot of bugs that still needed to be worked out, and a lot of system experience still to be gained. After flying for a bit longer we noticed that some of the drones would flip quite often, which is when we discovered that we needed the thrust upgrade to control the additional weight of the larger battery and charging deck.
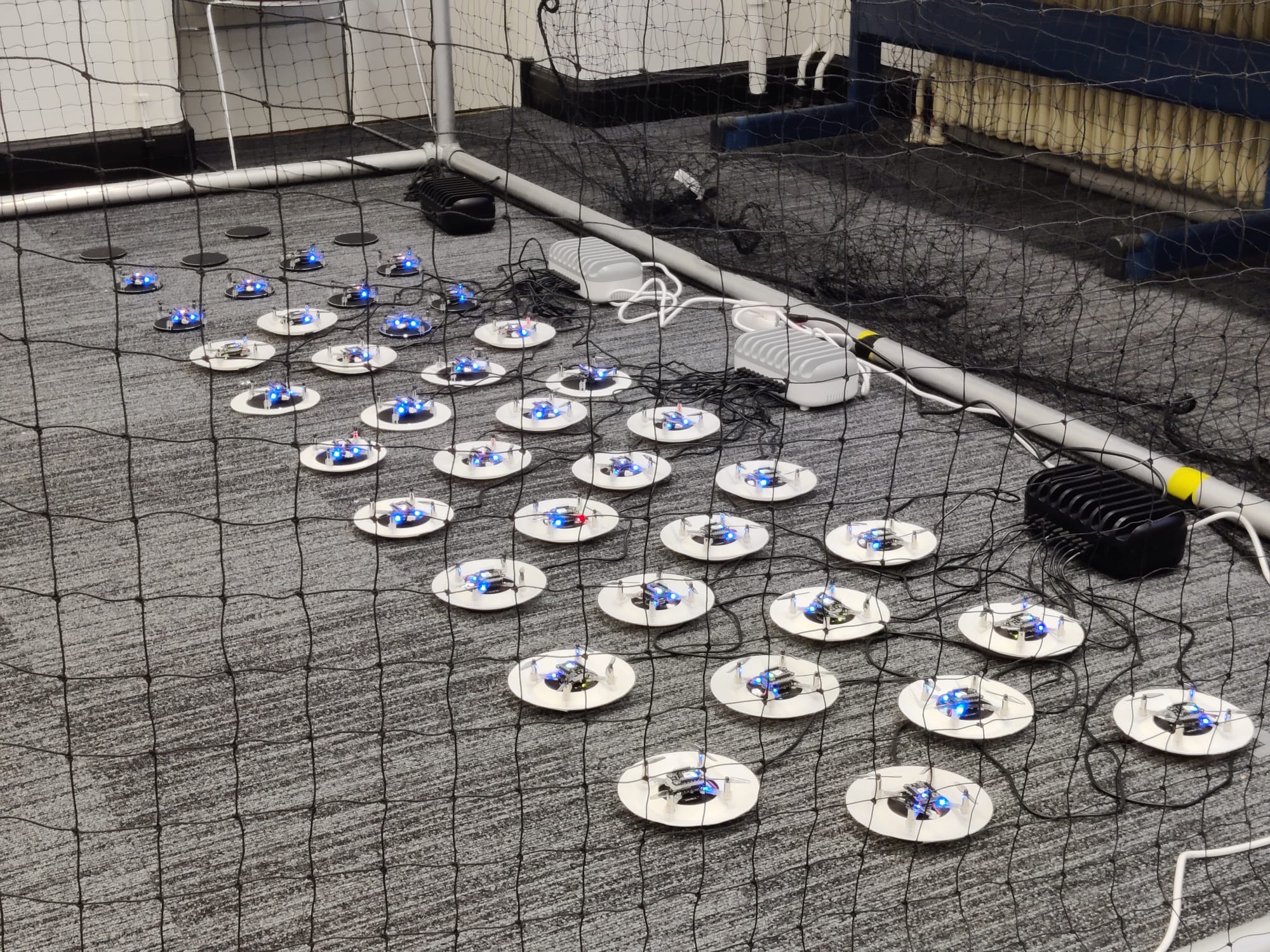
For the charging setup we took inspiration from the Bitcraze IROS 2022 demo; we 3D printed sloped landing pads that we tape onto a wireless charger. After a few iterations we landed on a design that uses minimal printer resources and allows the Crazyflie to land a bit off-center. This last feature turned out to be quite useful considering the large amount of destabilizing airflow that is generated by 40 drones. After receiving the last order of drones we also expanded the charging setup, which at this point takes up quite a bit of floor space. There are some ideas to create a vertical landing pad stack, which would bring the additional challenge of missing the landing pad not being an option.
All 40 drones recharging before their next flight.
After prototyping the charging setup and building confidence with the initial setup, we were confident enough in our system capabilities to expand it to the point where a continuous demo of 5-8 drones is possible. Although the system integration of the previous expansion went without much trouble, we did encounter a few issues when expanding to 40 drones. The first issue of which was radio communication, we noticed that a delay in the radio communication would be present if we increased the update rate above a certain level for a specific number of drones per radio. The second issue we encountered were performance drops related to the violation of certain bounds in the collision avoidance algorithm. These two issues were very difficult to debug since it was not immediately obvious where the source of the issue was.
The third and last major issue was the increase in destabilizing airflow of 40 drones compared to 8. With 40 drones there is a noticeable breeze when you stand next to the drone cage, which is nice for summertime, but not so nice when drones need to land in a tight-packed configuration. To combat this issue there is a limit to the amount of drones that can land at the same time. There is also a minimum separation distance between two active landing pads, which reduced the severity of the induced turbulence. There are still ongoing efforts to increase the landing success rate, which is currently affected by drones running out of power during the landing procedure.
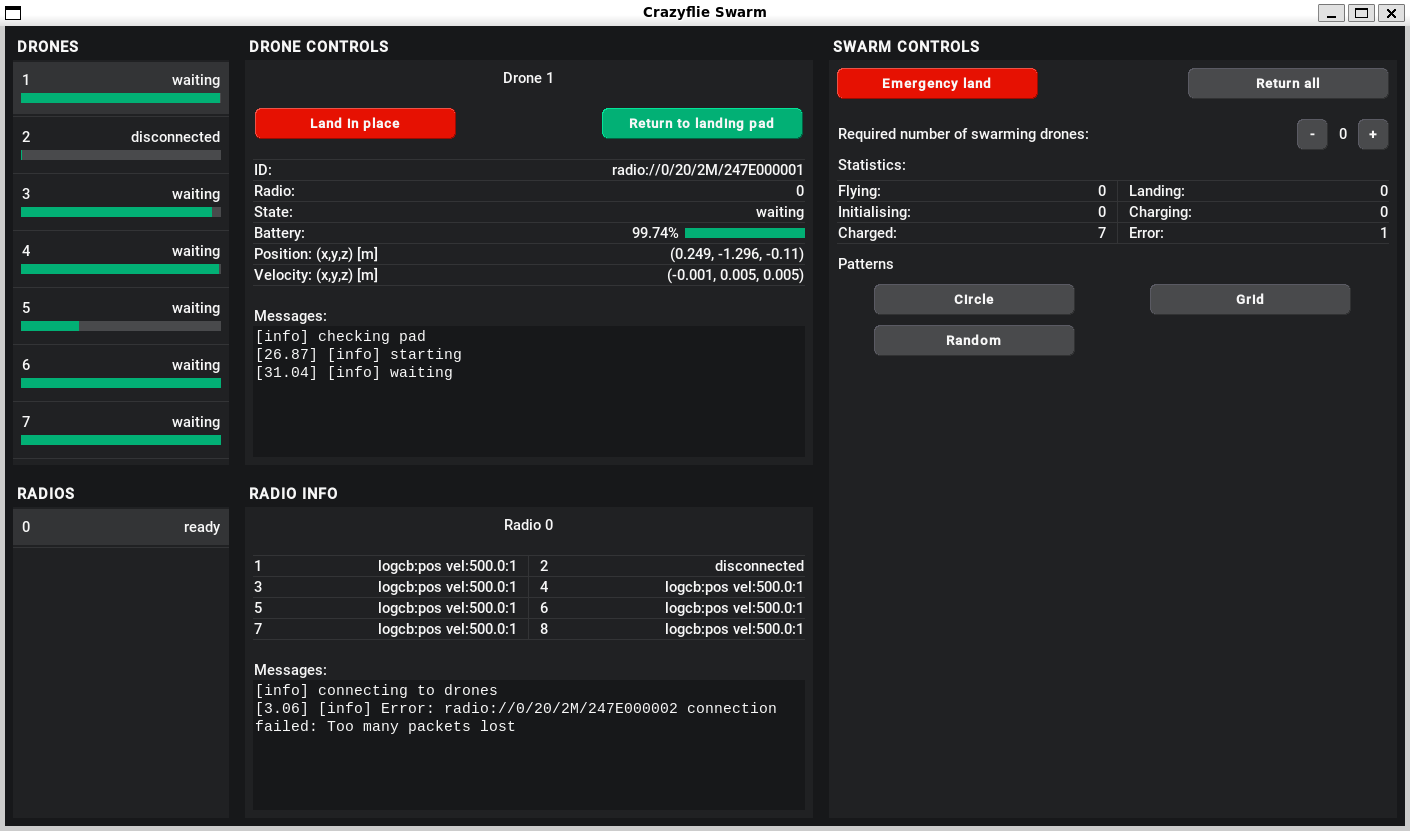
To control and monitor the swarm we designed a custom GUI, an impression of which you can see below. Although some of the buttons are still a work in progress, there are a lot of features that have already proven very useful, especially when testing a new feature.
V1 of the graphical user interface developed for the 24/7 swarm.
The code base that we created for the swarm will be largely open-sourced (only the collision avoidance will not be open-source) to provide researchers all around the world with the possibility to setup their own Crazyflie swarm for research. You can find the repository through this link. Note that the documentation and code base are still under development and might contain bugs/errors.
Human interaction
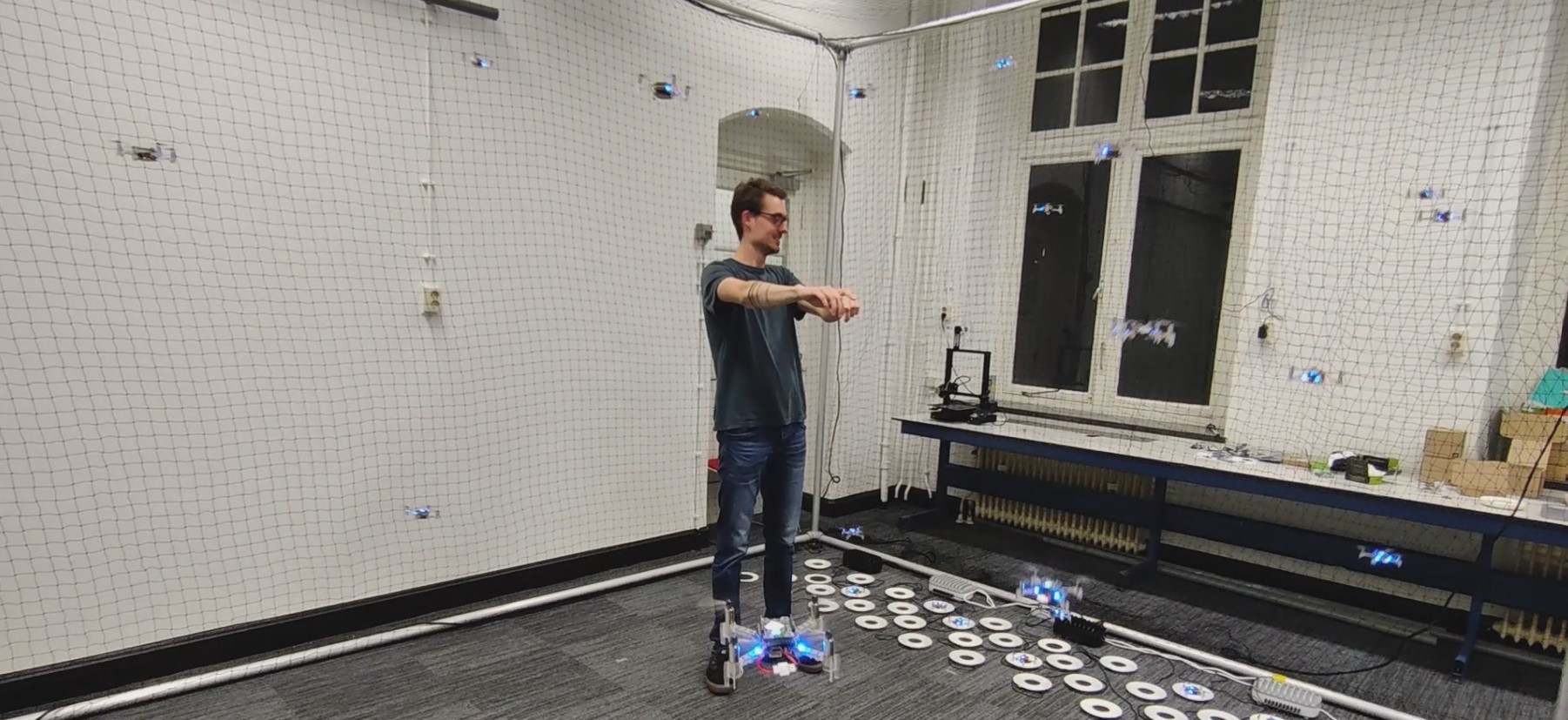
After creating all functionality to provide a continuously operating swarm demo, it was time to work on some of our stretch goals: 1. walking through the swarm whilst it is operating and 2. controlling the swarm using our arms. In the image below you can see an impression of precisely this functionality. The drones are following the operator’s gesture commands whilst performing live collision avoidance with an operator.
Team member Seppe directing the 40 drone swarm, see the full video here.
This demo requires multiple techniques and hardware elements working together to create a relatively low-latency, human-controlled swarm. We used a Kinect-like 3D sensor to perform human pose estimation, we subsequently used this data to create a dynamic obstacle in our collision avoidance software. An important element to consider here is the synchronization of the Lighthouse- and 3D sensor coordinate frames, i.e. without proper calibration the human will not be correctly positioned with respect to the drones and the drones will crash into the human. The interaction between the swarm control software and the human gesture commands also requires careful consideration, proper tuning is required to ensure a responsive system that is reliable and not too aggressive.
TUD Science Centre Swarming Lab
The next step in this project will be to set up the swarm at its new location, the TU Delft Science Centre. Here, the swarm will first and foremost be visible as a public demo, showcasing the capabilities of TU Delft state-of-the-art swarming research. There will also be a focus on developing the swarm as a research platform. This will allow TU Delft students and researchers to extend swarm functionalities and test their theory on a physical swarming system. Besides demos and academic research, there will also be worked on developing educational applications across the full educational board (primary school, high school and applied education). If you are interested in working on, or collaborating with the swarming lab on any of the above-mentioned tasks, feel free to email the lab management at operations.swarminglab@tudelft.nl.
The TU Delft Swarming Lab setup with 40 drones and charging pads for continuous operations and research.
Applications of Swarming
There are a lot of potential use-cases for fully autonomous drone swarms, ranging from indoor applications such as warehouse monitoring and factory inspection to outdoor applications such as search and rescue and surveillance. In our opinion, the true potential of drone swarms lies in applications where there is a significant need for a scalable system with a lot of built-in redundancy. A lot of additional use cases open up when we consider fully onboard autonomous systems, where the full benefits of decentralized swarming can be utilized. Currently, the size of drones needed to achieve such feats is quite large, though maybe in a few years, we could see more and more being done on drone platforms such as the Crazyflie.
A swarm inspection of an F-16 Fighting Falcon at Deltion College in Zwolle, the Netherlands.
An interesting area of application for drone swarms could be in the inspection of aircraft. Drone swarms provide a scalable and flexible means to perform a fast inspection of aircraft across an entire airfield or military base. To showcase that this can be done with any size of drone, we went to Deltion College in Zwolle to perform a mock inspection of an F-16 fighter jet. Above you can see an impression of the inspection. Another area of application is search and rescue, where there is a need for systems that can find people or objects of interest in unknown and cluttered environments. Furthermore, the area that needs to be searched is usually very large and sometimes difficult to travel on foot. A drone swarm could provide fast and reliable coverage of the area of interest, whilst providing full data traceability. Seppe and Lennart will work on creating drone swarms for these use cases with the start-up Emergent Swarms.
In just about 2 weeks, it’s ICRA 2023, which, as you could guess from the title of the post, is in London. The ExCel venue will welcome the world’s top academics, researchers, and industry representatives from May 29 to June 2nd, and that’s something we don’t want to miss.
ICRA is a conference that we hold dear and attended quite a few times – whether in person or online. We’ll be holding a booth there so don’t hesitate to pass by to say hello and see our demo!
We will be using the same demo as the one from IROS 2022; a fully decentralized swarm with the Lighthouse system. What we changed is that now we will be using the Crazyradio 2.0. We’re working on updating the demo and seeing what can be improved in the time we have before the conference. As a bonus, we plan to bring some prototypes and surprises; just to show off all the work we’ve been doing since our last conference in Japan. We will also have Matej Karasek, our partner from Flapper Drones with us in the booth! A good occasion to see his Nimble + in action and ask him all your questions.
Additionally, on Friday afternoon there will be a half-day workshop called ‘The Role of Robotics Simulators for Unmanned Aerial Vehicles’ that we helped organized. This workshop gathers researchers who have struggled to find, customize, or design a robotic simulator for their own purposes or specific application; so don’t hesitate to join if you’ve worked (or plan to) with drone simulation. All the information are here, be sure to sign up for it at your ICRA registration if you’re interested. It can also be attended by a stream by signing up for the virtual ICRA conference.
So we hope to see you in London, at booth H10 for good discussions, interesting conversations, and eventually a cup of tea!
We are excited to announce that we will be having developer meetings on first Wednesdays of every month! Additionally, we are thrilled to be present in person at ICRA 2023 in London. During the same conference, there will be half day workshop called ‘The Role of Robotics Simulators for Unmanned Aerial Vehicles’ so make sure to sign-up! Please check out our newly updated event-page !
Monthly Developer meetings
We have had some online developer meetings in the past covering various topics. While these meetings may not have been the most popular, we believe it is crucial to maintain communication with the community and have interesting discussions, and exchange of ideas. However, we used to plan them ad-hoc and we had no regularity in them, which sometimes caused some of us **cough** especially me **cough**, to create confusion about the timing and location. To remove these factors of templexia (dyslexia for time), we will just have it simply on the first Wednesday of every month.
So our first one with be on Wednesday 5th of April at 15:00 CEST and the information about the particular developer meeting will be as usual on discussions. From 15:00 – 15:30 it will be a general discussion, probably with a short presentation, about a topic to be determined. From 15:30-16:00 will address regular support question from anybody that need help with their work on the Crazyflie.
ICRA 2023 London
ICRA will be held in London this year, from May 29 – June 2nd, atthe ExCel venue. We will be located in the H11 booth in the exhibitor hall, but as the date approaches, we will share more about what awesome prototypes we will showcase and what we will demonstrate on-site. Rest assured, plenty of Crazyflies will be flown in the cage! To get an idea of what we demo-ed last year it IROS Kyoto, please check out the IROS 2022 event page. Matej from Flapper Drones will join us at our booth to showcase the Flapper drone.
We are thinking of organizing a meetup for participants on the Wednesday after the Conference Dinner, so we will share the details of that in the near future as well. Also keep an eye on our ICRA 2023 event page for updated information.
Additionally, participants can submit an extended abstract to be invited for an poster presentation during the same workshop. The submission deadline has been extended to April 3rd, so for more information about submission, schedule and speaker info, go to the workshop’s website.
This week’s guest blogpost is from Florian Goralsky from Bok o Bok about their dance piece with multiple Crazyflies. Enjoy!
Flying bodies across the fields is a contemporary dance piece for four performers and a swarm of drones, exploring the phenomenon of the disappearance of bees and the use of pollinating drones to compensate for this loss. The piece attempts to answer this crucial question in a poetical way: can the machine create life and save us from ecological disaster?
We’re super excited to talk about a performance that we’ve been working on for the past two years in collaboration with Bitcraze. It premiered at the Environmental Forum, Centre Pompidou Paris, in 2021, and we’ve had the opportunity to showcase it at different venues since then. We are happy to share our thoughts about it!
Choreographic research
Beyond symbolizing current attempts to use drones to pollinate fields, the presence of the Crazyflie drones, supports the back and forth between nature and technology. We integrate a swarm, performing complex choreographies, which refer to the functioning of a beehive, including the famous “bee dance”, discovered by Karl von Frisch, which is used to transmit information on the food sources. Far from having a spectacular performance as its only goal, the synchronization of autonomous drones highlights bio-inspired computer techniques, focused on collective intelligence.
Making a dance performance with drones needs a high accuracy and adaptability, both before and during the show. Usually, we only have a few hours, sometimes even a few minutes, to setup the system according to the space. We quickly realized we needed pre-recorded choreographies, and hybrid choreographies where the pilot could have a few degrees of freedom on pre-defined behaviors.
GUI Editor + Python Server
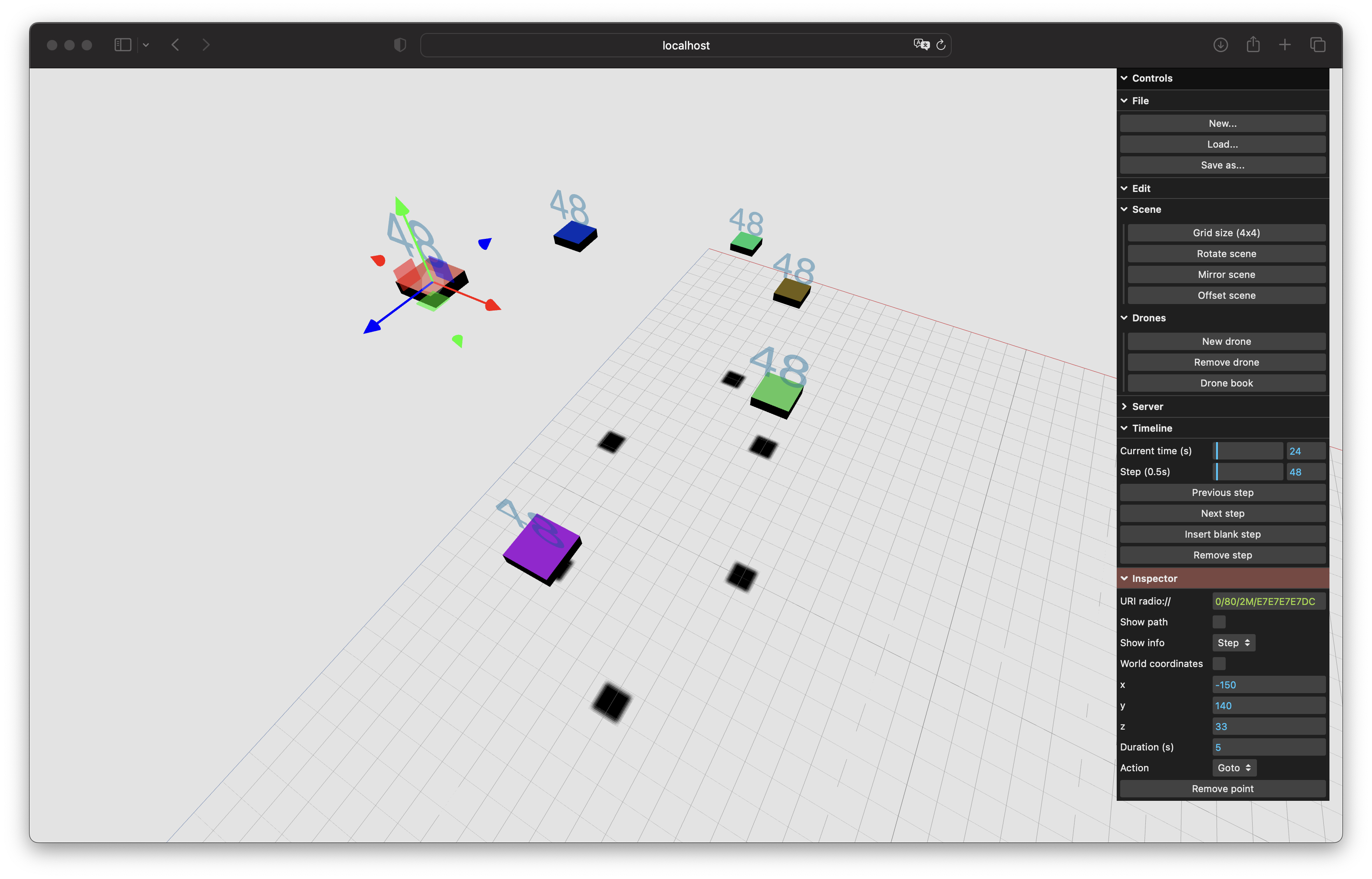
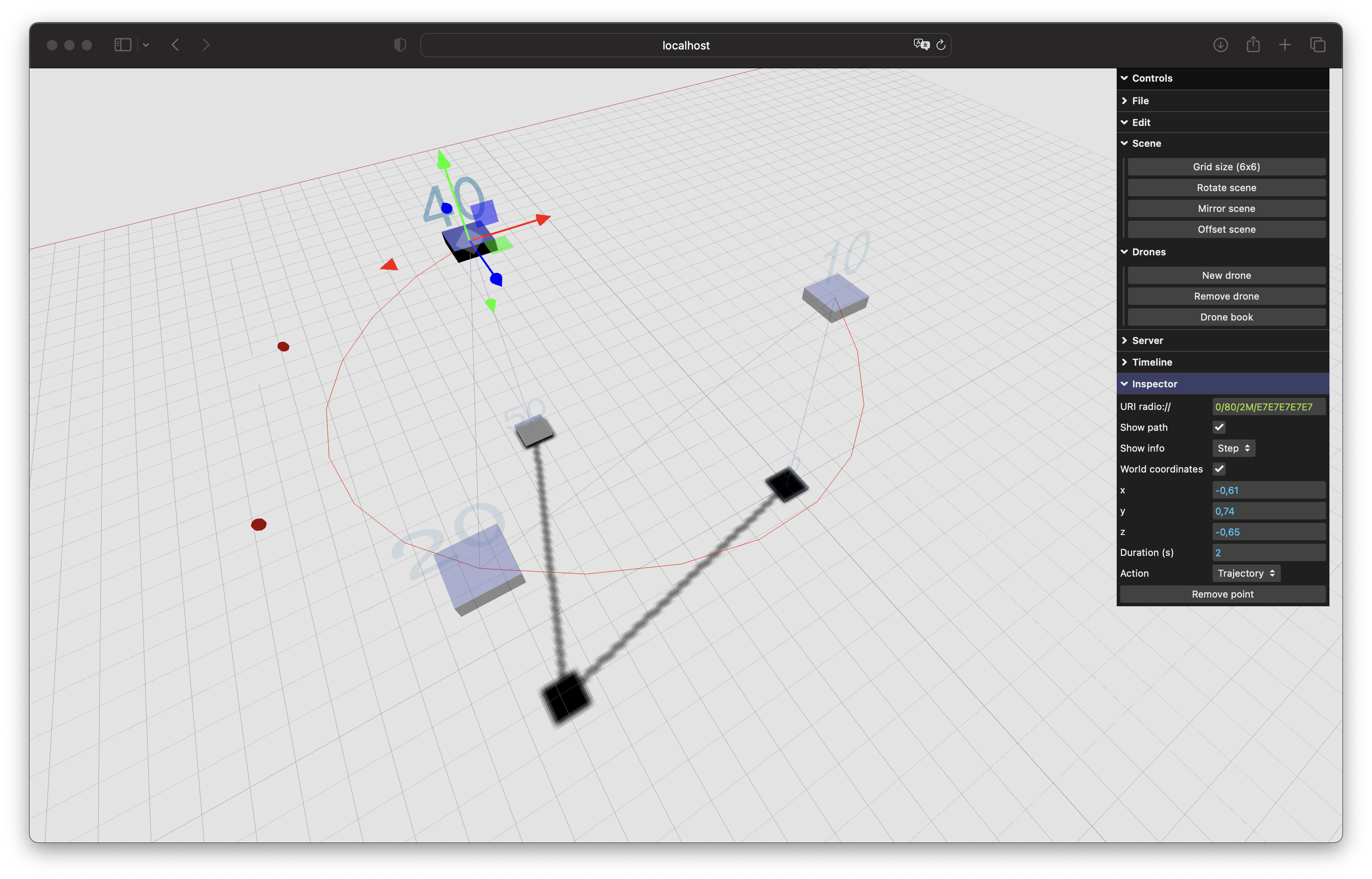
Taking this into account, we developed a web GUI editor, that is able to send choreographies created with any device to a Websocket Python server. The system supports any absolute positioning system (We use the Lighthouse), and then converts all the setpoints and actions to the Crazyflie API HighLevelCommander class. This system allows us to create, update, and test complex choreographies in a few minutes on various devices.
Preview position of six drones at a certain time.Early support of the CompressedTrajectories format, with Cubic bezier curves.
What is next?
We are looking forward to developing more dancers-drones interactions in the future. It will imply, in addition to the Lighthouse system, other sensors, in order to open up new possibilities: realtime path-finding, obstacle avoidance even during a recorded choreography (to allow improvisation), etc.
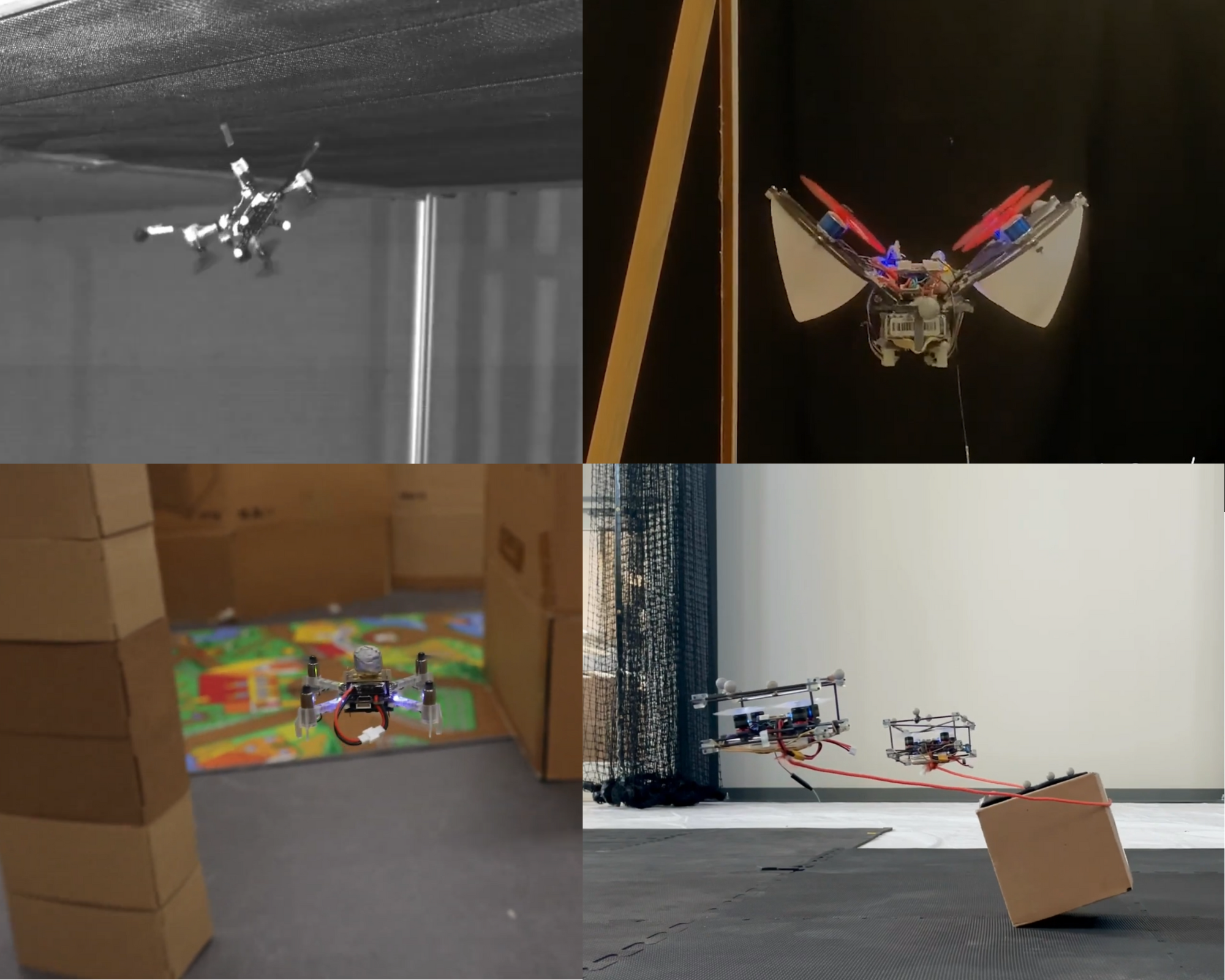
It’s time for a new compilation video about how the Crazyflie is used in research ! The last one featured already a lot of awesome work, but a lot happened since then, both in research and at Bitcraze.
As usual, the hardest about making those videos is choosing the works we want to feature – if every cool video of the Crazyflie was in there, it would last for hours! So it’s just a selection of the most videogenic projects we’ve seen. You can find a more extensive list of our products used in research here.
We’ve seen a lot of projects that used the modularity of the Crazyflie to create awesome new features, like a catenary robot, some wall tracking or having it land upside down. The Crazyflie board was even made into a revolving wing drone. New sensors were used, to sniff out gas leaks (the Sniffy bug as seen in this blogpost), or to allow autonomous navigation. Swarms are also a research topic where we see a lot of the Crazyflie, this time for collision avoidance, or path planning. We also see more and more of simulators, which are used for huge swarms or physics tests.
Once again, we were surprised and awed by all the awesome things that the community did with the Crazyflie. Hopefully, this will inspire others to think of new things to do as well. We hope that we can continue with helping you to make your ideas fly, and don’t hesitate to share with us the awesome projects you’re working on!
Here is a list of all the research that has been included in the video:
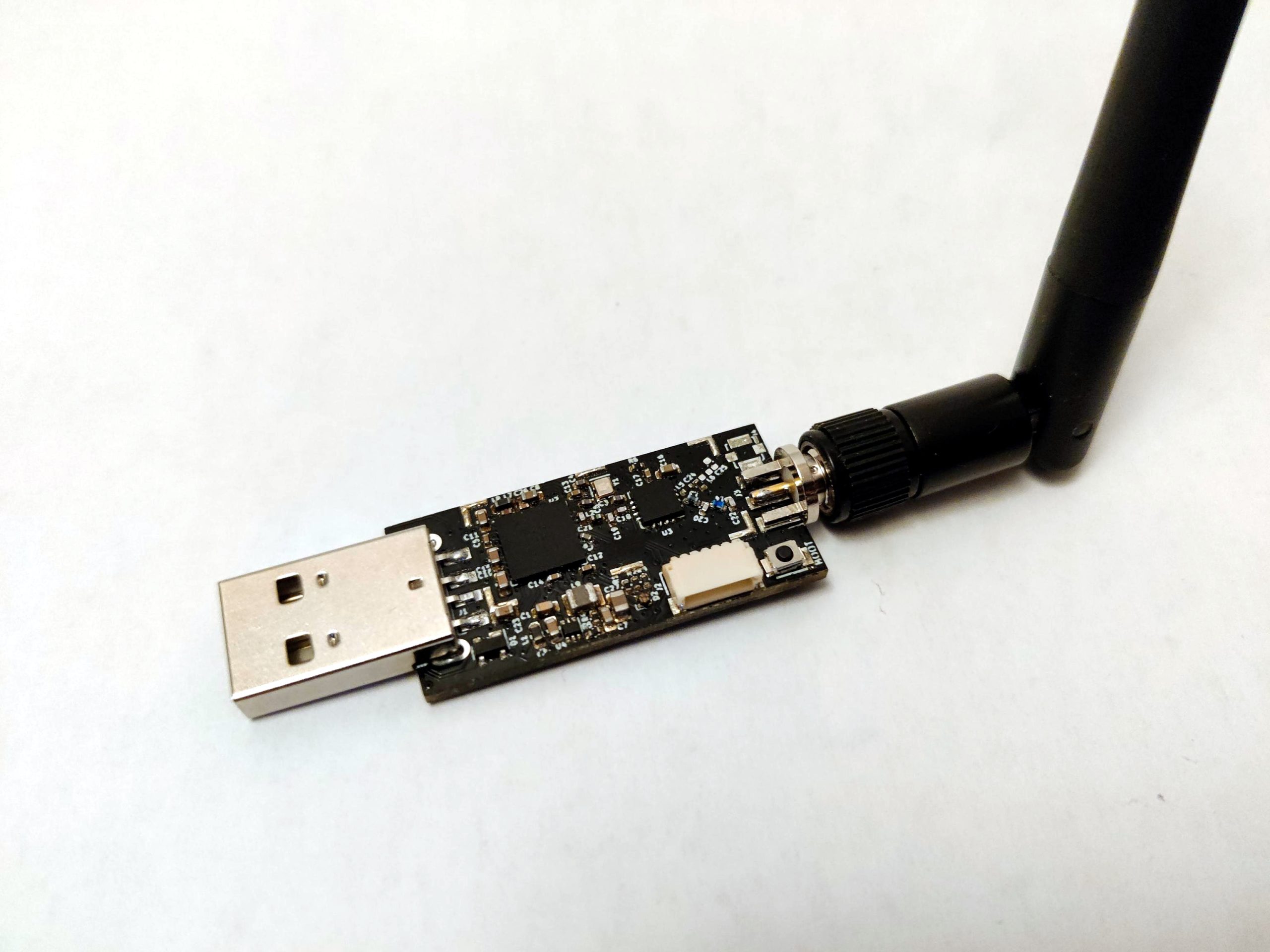
As already announced in a previous blog post, we have been working on a replacement for the Crazyradio PA. Crazyradio is the USB dongle used to communicate with Crazyflie 2.1, Crazyflie Bolt and any other 2.4GHz radio board we are making. We are also visiting FOSDEM in Brussels at the end of the week and will organize a community dev-meeting about Crazyradio and communication end of February: more on that at the end of the post.
Crazyradio 2.0 will have the following characteristics:
Based on the nordic-semiconductor nRF52840
64MHz Cortex-M4
1024KB flash, 256KB ram
Radio supporting Nordic protocol, Bluetooth low energy as well as IEEE802.15.4
1Mbps and 2Mbsp bitrate to Crazyflie
USB full speed (12Mbps) device
Radio power amplifier providing up to +20dBm output power
‘Drag and drop’ bootloader with physical button to start in bootloader mode
Same debug port as on the Crazyflie for ease of development
One of the main changes versus the Crazyradio PA will be the available CPU power and ease of development: this will allow to experiment with and implement much more advanced communication protocol like channel hopping and peer-to-peer communication.
On the software side, there will be two modes available for Crazyradio 2.0: a compatibility mode that emulate a Crazyradio PA and should work with all our existing software as well as a new Crazyradio mode that will have a much improved USB protocol allowing for more efficient communication when controlling multiple Crazyflie as well as making it easy to support more protocols in the future.
These two modes will be available as two different firmware and the user can ‘drag and drop’ the firmware with the wanted mode.
As for the Crazyradio PA (version 1), sourcing the components for it has been a bit challenging lately. We will sell Crazyradio PA as long as we have stock for it and the software will continue to support it for the foreseeable future.
Announcements
Kimberly and I, Arnaud, will be visiting the FOSDEM conference at the end of the week in Brussels. If you are there too and want to meet us do not hesitate to drop a message in the comment there, in Github discussions or by mail. It would be great to meet fellow Crazyflie users!
We are also planning an online dev-meeting about Crazyradio 2.0 and communication the 22nd of February 2023. The information about joining will be on Github Discussions. We are interested in talking, and bouncing ideas about radio and communication protocol: with the new Crazyradio we have an opportunity to work on communication protocols to improve them and makes them more useful to modern use of the Crazyflie.