This week, some of us are on an adventure! Marcus and Tobias will be exploring both the RIG and Embedded World fairs.
RIG showcases the latest innovations in robotics and intelligent systems, while Embedded World is the place to be for cutting-edge embedded technologies. Both events promise amazing demos, insightful talks, and a chance to catch up with some of our collaborators.
Planning to attend either fair? Let’s meet up! We’d love to explore the exhibitions together, chat about cool technologies, or just geek out about the innovations on display. We’ll be wandering through Embedded World on Thursday and hitting RIG on Friday. Send us an email if you’d like to connect – we’re always up for grabbing coffee!
Next May in Atlanta
After our adventures as visitors, we’re thrilled to announce that we’ll be exhibiting at the International Conference on Robotics and Automation (ICRA) 2025! Stop by our booth where we’ll be showcasing our latest demo. We’ll be, as always, available to discuss our newest products, answer your technical questions, and provide insights into how our solutions can transform your robotics applications. We’re also eager to hear your thoughts on what you’d like to see in our upcoming products. Mark your calendars and make sure to find us at Booth #131 – we may even have some presentations in the work, but nothing confirmed yet.
Today in the shop
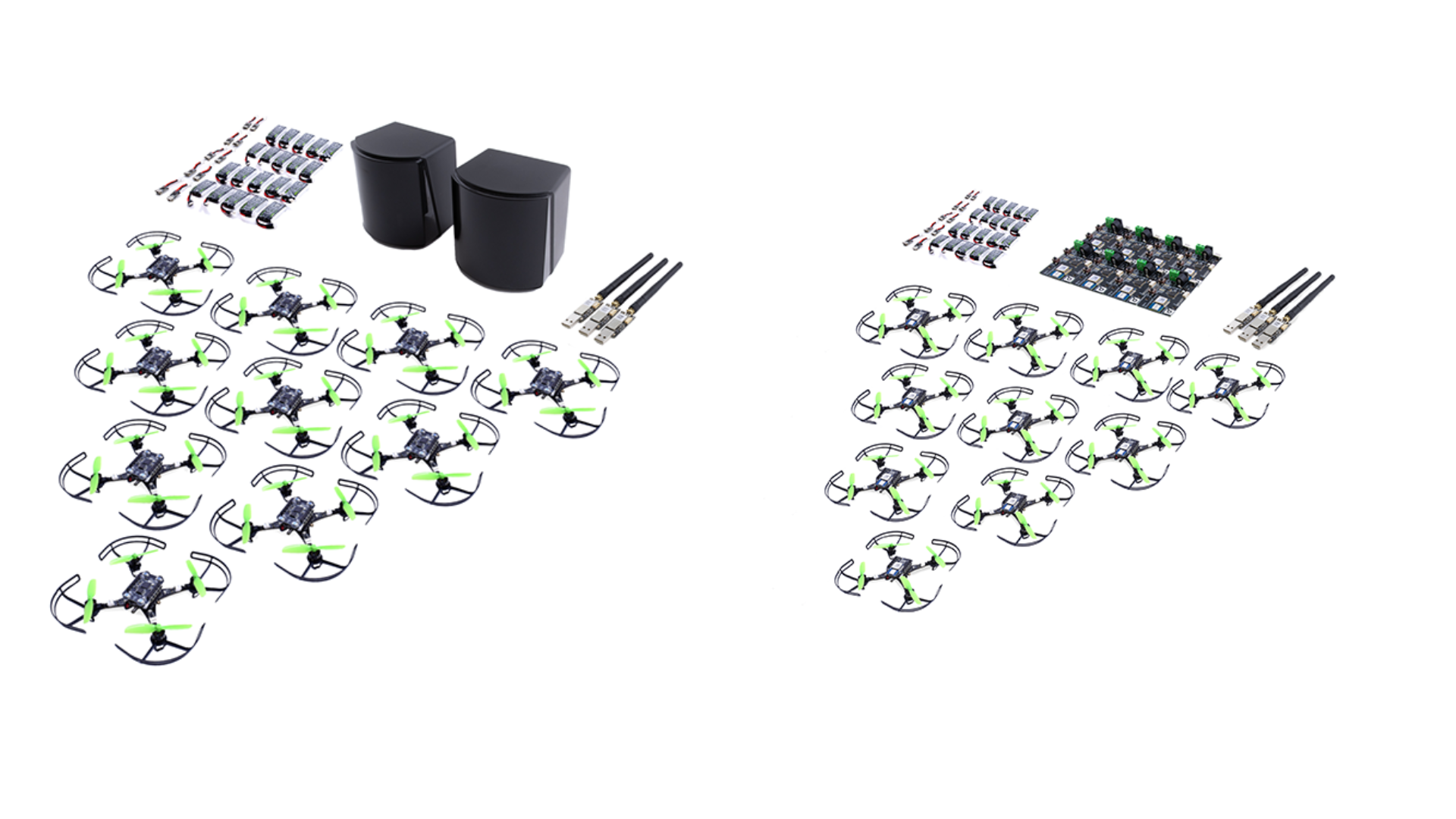
And, last but not least, the Brushless is now available in a Swarm configuration! Both the Lighthouse Swarm bundle and Loco Swarm bundle have been added to our shop. These new bundles feature all the same components as our standard Swarm packages, but come equipped with the Crazyflie 2.1 Brushless instead of the Crazyflie 2.1+ model.
It’s hard to believe it’s already been almost a month since the Crazyflie 2.1 Brushless was released. We know some of you have already had the chance to take it for a spin, and we’re really excited to hear what you think.
Here at the office, we have started using them a lot – to discover gaps in the documentation, to test our new features, or simply to make nice trajectories during a Fun Friday as shown here:
We’re constantly amazed by it and the new capacity it brings… But, interestingly, we haven’t received many support questions so far… which has us wondering—did we accidentally make it too good? Jokes aside, we’d love to get your thoughts! Whether you have feedback, questions, or just want to share your experience, we’re all ears.
We have a quick form for you here to fill out – it takes a couple of minutes and would help us a lot:
After a busy fall of testing and fine-tuning, we’re thrilled to announce that the Brushless is now available! Our team has put in a lot of effort to ensure it meets our high standards, and we can’t wait for you to experience it.
If you’re curious to see it in action, we’ve featured the Brushless in our recent Christmas video, where it showcases its capabilities by navigating through Christmas obstacles with precision.
For those interested in its application in research, our latest blog post demonstrates how the Brushless can be used in academic settings. It’s exciting to see the potential it holds for various fields!
If you need anything to keep your Brushless flying, all spare parts are already stocked in our store. Additionally, many of our bundles now offer Brushless versions, providing more options to suit your needs.
We’re eager to hear your thoughts and feedback as you explore the capabilities of our latest drone. Your insights are invaluable to us and help drive our continuous improvement.
We look forward to seeing what you’ll achieve with the Brushless!
Robotics and Simulation at FOSDEM 25
Arnaud will be at Fosdem the 1st and 2nd of February 2025 in Brussels, Belgium. He’s actually hosting with Kimberly the robotics and simulation dev-room! If you’re in Brussels, we’ll be happy to meet you.
This Christmas, Bitcraze is sending out a callout to Santa. As it turns out, one of our Brushless prototypes has a lifelong dream of becoming one of Santa’s reindeer. In a hopeful attempt to fulfill its wishes, we shot a video to prove that it’s ready for Santa’s most elite aerial team!
Imagine a tiny, determined drone with big dreams, practicing its sleigh route moves with the intensity of an Olympic athlete. Our little Brushless is proving it has what it takes to join the North Pole’s premier delivery squad.
Going through small openings, avoiding obstacles, and flying in perfect precision are skills that any good reindeer should have – but here, the Brushless accomplish this in an autonomous flight, and in a much smaller and more practical package than Rudolph and consorts.
Of course, there’s some technical magic behind this Christmas miracle. For this project, we relied on stock firmware and Python library, taking advantage of the new spiral and constant velocity features (check out the GitHub PR here). These features added variety and fluidity to the maneuvers, moving beyond straight lines and making the flight more interesting. By using the high-level commander, we took a simpler approach compared to trajectory optimization, which we’ve used in past Christmas videos. Trajectory optimization would have been far more difficult for this project due to the unique challenges of the flight path—namely its length and the need for pinpoint accuracy near obstacles and through gates.
Positioning relied on four Lighthouse base stations, which we used to manually locate the Christmas wreaths by holding the drone within each one to log their exact coordinates. This project also gave us the opportunity to further integrate the Brushless into our firmware and Python libraries, setting the stage for a smoother launch in the new year. The Brushless impressed us yet again during this project. Even though we’ve tested it extensively in the past, seeing it navigate tight gates with such precision and handle the demanding flight path reinforced just how capable it is. Working with it in this setting has made us even more excited to release it soon and share its potential with everyone.
Santa, if you’re reading this, we think we’ve found your next top reindeer recruit. You can watch the full audition tape here or below:
And if you think what you just saw is a pretty straight-forward and easy path, think again! This year’s blooper video highlights the resilience of the Crazyflie 2.1 Brushless and the fast, iterative workflow we used for this project. Since testing reliability and resilience was a key goal, we adopted a workflow that allowed for quick scripting, flying, and adjusting—often completing the cycle in just minutes. This approach made crashes more likely, especially during the spiral sections where the drone struggled to keep up and started cutting corners. While we resolved the issue by slowing those sections down, we suspect that more aggressive tuning of the Mellinger controller could have helped the drone maintain speed without cutting corners. The Brushless managed some impressive recoveries, but even minor collisions usually meant it couldn’t keep pace with the rest of the trajectory. After all the trial and error, we had a stable and reliable setup that not only performed well for the demo but also flew beautifully when we showed it to our families at the Christmas party.
Here is what our Brushless could endure during training:
Merry Christmas from all of us at Bitcraze – where even our prototypes have holiday dreams!
November is always a tough month in Sweden, when the darkness deepens and the cold begins to bite. We had our first snow last week, a sudden reminder that winter has arrived. So instead of letting the gloom settle in, we decided to turn to what makes us feel good: pretty lights, pretty trees, and pepparkakor!
I realized that, although we talked about it last year, we never fully showed our big new flight arena once it was up and running. It made an appearance in our latest Christmas video, but was actually never fully revealed before. Capturing a 110square meters space in a single photo is no small feat, but here is my best shot:
It felt the right time to make the office feel a little more wintery. It may be a little early, but we couldn’t resist the charm of festive decorations and a cozy atmosphere to brighten up the dark days. Especially now that we’re more settled into our massive flight arena – a space this large calls for many more Christmas lights! Of course, there’s more to it than just creating a Netflix-Christmas-movie vibe—we’re also gearing up for two big events: our annual Christmas party, which will be hosted here, and the filming of our newest Christmas video!
Speaking of Christmas video, that’s exactly what we’ll be diving into during our next dev meeting! We recently had a great time revisiting how we’ve used demos to guide development – if you missed that particular dev meeting, you can see it here. We thought it would be a great idea to dedicate our next session to exploring all the Christmas videos we’ve created over the years. It’s fascinating to see how our Christmas projects have evolved over time and we hope you’ll join us to reminisce about it Wednesday 11th of December at 15.00 (CET). You’ll find all the info here.
It’s been a while since I last talked about hiring! We successfully onboarded our most recent recruit, and now it’s time to start planning for the future.
One of our challenges as a team is that we’re very heavy on engineers and developers. While that’s fantastic for building products, it means we lack expertise in other important areas. That’s why we’re now shifting our focus to bringing in talent to help fill those gaps. We’ve partnered with a recruitment agency once again to help us find the right people for the job. We’re currently hiring for two distinct roles—here’s what we’re looking for!
Technical sales lead
You will be responsible for developing and implementing sales strategies while exploring both new and existing markets. You’ll take the lead in driving sales and acquiring new customers, becoming the company’s go-to expert on marketing and sales tactics. Your day-to-day tasks will include supporting business development, optimizing sales processes, and proposing effective marketing strategies. This role is perfect for someone with a background in technical sales with a strong strategic mindset and a sense of responsibility.
We’re looking for a Technical Success Engineer to provide our customers with technical guidance and product expertise. This role involves offering first-line support, creating documentation and tutorials, and assisting with tech-focused sales efforts. The goal is to ensure a smooth and seamless customer experience while building strong client relationships. It’s an ideal position for a “social developer”—someone with a solid technical background who also excels in communication and enjoys engaging with others.
Both positions are full-time and based at our office in Malmö, Sweden. If you’re curious about why you should join our team, I’ve already shared some of the many reasons why I love being part of Bitcraze.
If you’re interested or have any questions, please send an email to fredric.vernqvist@techtalents.se or contact us at contact@bitcraze.se.
It’s now become a tradition to create a video compilation showcasing the most visually stunning research projects that feature the Crazyflie. Since our last update, so many incredible things have happened that we felt it was high time to share a fresh collection.
As always, the toughest part of creating these videos is selecting which projects to highlight. There are so many fantastic Crazyflie videos out there that if we included them all, the final compilation would last for hours! If you’re interested, you can find a more extensive list of our products used in research here.
The video covers 2023 and 2024 so far. We were once again amazed by the incredible things the community has accomplished with the Crazyflie. In the selection, you can see the broad range of research subjects the Crazyflie can be a part of. It has been used in mapping, or swarms – even in heterogeneous swarms! With its small size, it has also been picked for human-robot interaction projects (including our very own Joseph La Delfa showcasing his work). And it’s even been turned into a hopping quadcopter!
Here is a list of all the research that has been included in the video:
Energy efficient perching and takeoff of a miniature rotorcraft Yi-Hsuan Hsiao, Songnan Bai, Yongsen Zhou, Huaiyuan Jia, Runze Ding, Yufeng Chen, Zuankai Wang, Pakpong Chirarattananon City University of Hong Kong, Massachusetts Institute of Technology, The Hong Kong Polytechnic University
But enough talking, the best way to show you everything is to actually watch the video:
A huge thank you to all the researchers we reached out to and who agreed to showcase their work! We’re especially grateful for the incredible footage you shared with us—some of it was new to us, and it truly adds to the richness of the compilation. Your contributions help highlight the fantastic innovations happening within the Crazyflie community. Let’s hope the next compilation also shows projects with the Brushless!
ROSCon is a developer’s conference that focuses entirely on the Robot Operating System (ROS), bringing together developers from around the globe to learn, discuss, and network. It serves as a space for ROS developers to explore the latest advancements, share their experiences, and collaborate on cutting-edge robotics projects. We attended ROSCon 2022 in Japan, and it was a fantastic experience. So when the opportunity came to participate again this year, we couldn’t pass it up! Not only is this a conference that’s been close to our hearts, this year it’s also close to the office: it’s merely a 3hours train ride away.
The 2024 edition is full of promises already, and we’re excited to be a part of it in several ways. We talked about how we helped out the diversity committee already, contributing to efforts that promote a more inclusive and diverse community within the robotics field. Moreover, we will have a booth there. We’ll be located at in Room 2, at booth 21. If you have trouble finding us, just listen closely to the sound of drones buzzing! ! We’ll be showcasing a live demo that’s still under construction. If you’re curious and want to know more about it, just keep an eye on our weekly blogposts to get an update once we finalize our plans.
In addition to being an exhibitor, we also have the honour of presenting a talk. Arnaud will be speaking on October 23 at 14:40 in Large Hall 4. His talk, titled “The Lighthouse Project: From Virtual Reality to Onboard Positioning for Robotics”, will dive into the Lighthouse system, as the title implies. He’ll explain how this technology, originally developed for virtual reality, is being adapted for onboard positioning in various types of robots.
We’re really looking forward to connecting with fellow developers, learning from the presentations, and sharing our own work with the community. If you’re attending ROSCon 2024, be sure to stop by Booth 21 and catch Arnaud’s talk—we can’t wait to see you there!
This week, we have a guest blog post from Scott at Droneblocks.
DroneBlocks is a cutting-edge platform that has transformed how educators worldwide enrich STEM programming in their classrooms. As pioneers in the EdTech space, DroneBlocks wrote the playbook on integrating drone technology into STEM curriculum for elementary, middle, and high schools, offering unparalleled resources for teaching everything from computer science to creative arts. What started as free block coding software and video tutorials has become a comprehensive suite of drone and robotics educational solutions. The Block-Coding software still remains free to all, as the DroneBlocks mission has always been to empower educators and students, allowing them to explore and lead the way. This open-source attitude set DroneBlocks on a mission to find the world’s best and most accessible micro-drone for education, and they found it in Sweden!
Previously, DroneBlocks had worked alongside drone juggernaut DJI and their Tello Drone. The Tello was a great tool for its time, but when DJI decided to discontinue it with little input from its partners and users, it made the break much easier. The hunt began for a DJI Tello replacement and an upgrade!
Bitcraze’s choice to build Crazyflie as an open platform had their drone buzzing wherever there was curiosity. The Crazyflie was developed to fly indoors, swarm, and be mechanically simplistic. DroneBlocks established that the ideal classroom micro-drone required similar characteristics. This micro-drone needed to be small for safety but sturdy for durability. It also needed to be easy to assemble and simple in structure for students new to drones. Most importantly, the ideal drone needed to have an open line of software communication to be fully programmable. Finally, there had to be an opportunity for a long-lasting partnership with the drone manufacturer, including government compliance.
After extensive searching and testing by DroneBlocks, the Crazyflie was a diamond in the rough – bite-sized and lightweight, supremely agile and accurate, reliable and robust, and most importantly, it was an open-source development platform. The DroneBlocks development team took the Crazyflie for a spin (or several) and with excitement, it was shared with the larger curriculum team to be mined for learning potential. It was promising to see Crazyflie’s involvement in university-level research studies, which proved it meant business. DroneBlocks knew the Crazyflie had a lot going for it – on its own. The team imagined how, when paired with DroneBlocks’ Block Coding software, Flight Simulator, and Curriculum Specialists, the Crazyflie could soar to atmospheric heights!
Hardware? Check. Software? Check. But what about compatibility? DroneBlocks was immediately drawn to the open communication and ease of conversation with the Bitcraze team. It was obvious that both Bitcraze and DroneBlocks were born from a common thread and shared a mutual goal: to empower people to explore, investigate, innovate, research, and educate.
DroneBlocks has since built a new Block Coding interface around the Crazyflie, allowing students to pilot their new drone autonomously and learn the basics of piloting and coding concepts. This interface is offered with a brand new drone coding simulator environment so students can test their code and fly the Crazyflie in a virtual classroom environment.
The Crazyflie curriculum currently consists of courses covering building, configuring, and finally, programming your drone with block coding (DroneBlocks) and Python. DroneBlocks’ expert curriculum team designed these courses to enable learners of all ages and levels to learn step by step through video series and exercises. New courses around block coding and Python are in constant development and will be continuously added to the DroneBlocks curriculum platform.
Crazyflie Drones now headline DroneBlocks’ premiere classroom launch kit. The DroneBlocks Autonomous Drones Level II kit encompasses everything a middle or high school would need to launch a STEM drone program, including the hardware, necessary accessories, and safety wear paired with the DroneBlocks software and curriculum. As a result, thousands of new students have entered the world of Drones and programming thanks to the Bitcraze + DroneBlocks partnership.
DroneBlocks has become an all-inclusive drone education partner for engaging and innovative learning experiences—and the Crazyflie delivers this by being a cutting-edge piece of hardware in a clever package.
If you know a little about Sweden, you know about Midsommar. Nothing like the 2019 horror film (thankfully), though we do wear flower crowns and dance around the pole. It’s usually an occasion to celebrate with family (and alcohol) those long days and short nights. We actually celebrated a little bit early today with a nice team barbecue.
Midsommar is next Friday, and it marks the official kickoff to summer here in Sweden. That also means that for the coming 2 months, Bitcraze will be operating with a slightly smaller team. So, what does that mean for you? This should not impact you too much, of course, but here are the most important things to note:
Developer Meetings: First up, our regular developer meetings will be on hiatus during July and August. It’s a great time for everyone, including you, our regular attendees, to take a breather. We’ll be back in action come September, resuming our usual schedule of one meeting per month.
GitHub: With fewer team members around, our response time on GitHub discussions might be a bit slower. We strive to answer every question, but with less manpower, some issues might only get resolved when the person with the right expertise returns from their vacation. We appreciate your patience and understanding during this time.
Orders: Shipping and deliveries should have the same pace, so don’t worry about your order coming on time, we’ve got that covered!
Ongoing projects and maintenance
Our focus during the summer will shift primarily to maintenance and continuing work on ongoing projects. We’re putting the final touches on the Brushless project of course, and will keep working on its charger solution too.
We’re excited to announce our participation in Robotics Developers Day on July 5th. We’re not only sponsors of this event, we’re also thrilled that Kimberly will be hosting a live learning session about ROS 2 on the Crazyflie.
For us at Bitcraze, summer is a wonderful opportunity to slow down a bit and focus on projects we don’t usually have time for. This could mean diving deeper into learning RUST, reorganizing the office, or trying some prototypes out. It’s a chance to reset and prepare for the busy months ahead.
We hope you have a fantastic summer filled with sunshine, relaxation, and lots of new adventures. Glad Midsommar, as we say here!