It seems that many of you are very interested in simulation. We might have gotten the hint when we noticed that our July’s development meeting had our best attendance so far! Therefore, we will be planning a new developer meeting to discuss the upcoming plans for supporting simulation for the Crazyflie.
Getting Started with Simulation tutorial
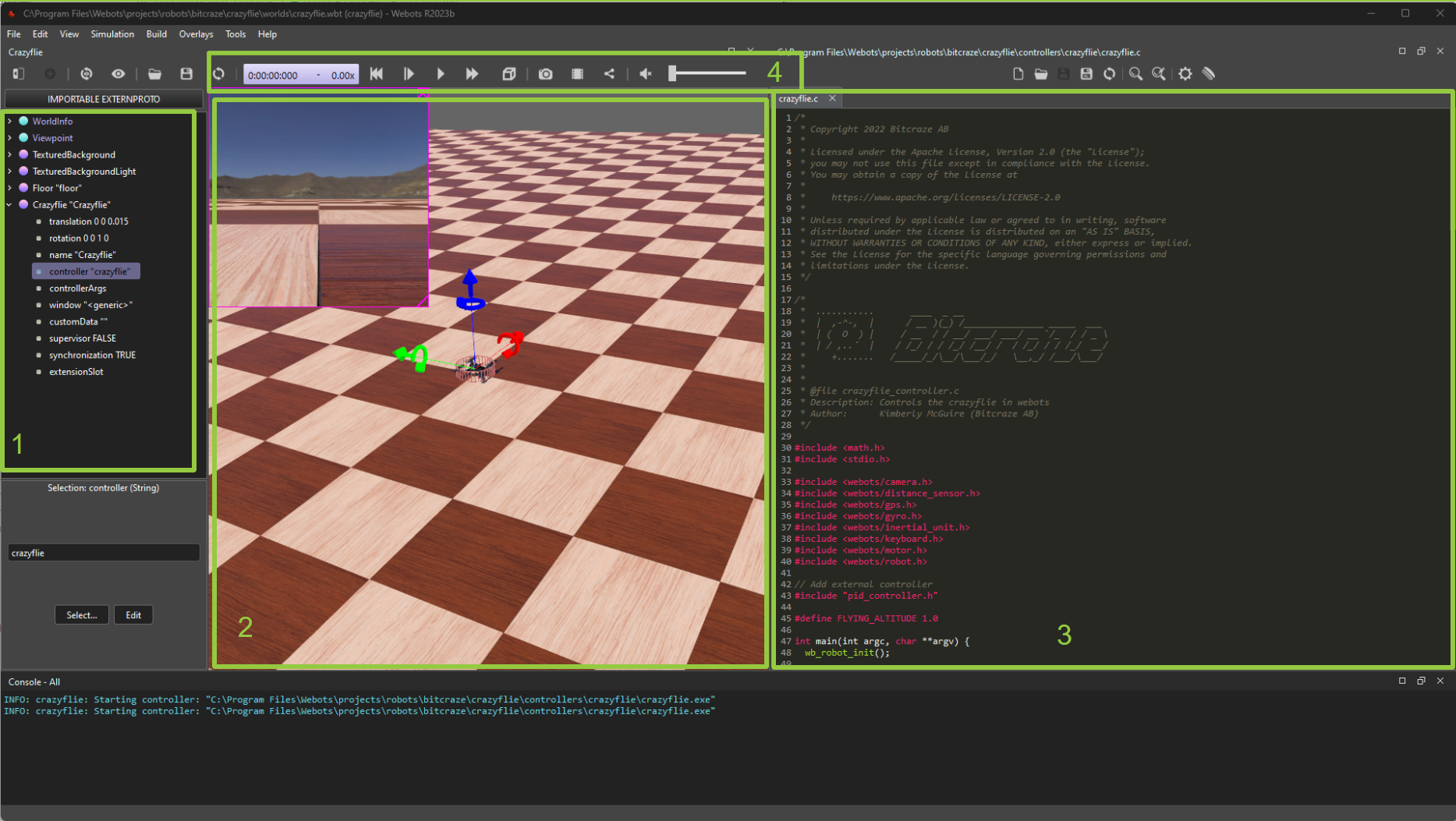
Perhaps you are not aware, but there is actually a Getting Started tutorial for simulation that has been available for a little over 2 months now. Unfortunately, circumstances prevented us from writing a blog post about it, but we’ve noticed that not all of you are aware of it yet!
The getting-started tutorial demonstrates how to set up the Webots simulator, which already includes Crazyflie models and some cool examples:
An example that you can control the Crazyflie with the keyboard
An example that the Crazyflie does wall following autonomously
The tutorial concludes with instructions on how to edit these controllers. Alternatively, you can choose to run the files directly from the crazyflie-simulation repository. After completing the tutorial, you can explore the simulation repository documentation for more information and to access additional examples.
Upcoming plans
With so many plans and so little time! This is a common phrase at Bitcraze, and it’s a symptom of being an overly ambitious, but too small, team. By the way, we are still looking for more people :). Nonetheless, we have big plans to take our Crazyflie simulation to the next level:
ROS 2 Crazyflie model for Webots: The Crazyflie has been a part of the Webots standard robots for 2 years now, but we still need to implement the Crazyflie into the Webots ROS 2 repository.
Better (new) Gazebo support: Currently, we only have a very simple example for Gazebo, which is limited to motors with no control input. Working with the C++ API can be a bit challenging, so it might be worth considering the use of ROS 2 in the loop here. Let’s see what comes out of it.
Integration into Crazyswarm2: Once the Webots ROS2 node has been released, integrating the Crazyflie simulation into Crazyswarm2 will become more straightforward.
Improvement to the Python bindings: We’ve had Python bindings for controllers and the high-level commander for a while. Recently, we also added Python bindings for the estimator (currently for loco positioning only). However, there are still some issues to address with the Python bindings for the controllers due to timing issues with the simulators.
Linking with our CFLIB: Currently, both Webots and the Crazyflie Python library use entirely different APIs. This means that these scripts are not compatible and you’ll need to be creative not to reuse new code. However, wouldn’t it be nice to use a python example from the python library with a --sim and that it would actually control the Crazyflie in the simulator instead?
Of course, there are probably more improvements that we haven’t thought of yet, but that’s why we have developer meetings!
Come and join us at the Developer meeting.
We will be hosting another developer meeting on November 1st at 15:00 Central European Time (accounting for the time-shift from summer to autumn). You can find details on how to join in the discussion thread here.
Just for your information, I (Kimberly) am the main driving force behind our simulation efforts. However, I’m currently on partial sick leave and will soon be on full leave for a while. I kindly ask for your patience with the pace of ongoing developments. Remember, it’s an open-source project, so if you’d like to contribute and help out, we would greatly appreciate it :)
Today, Suryansh Sharma from TU Delft presents the open-source Gimbal they devised. Enjoy!
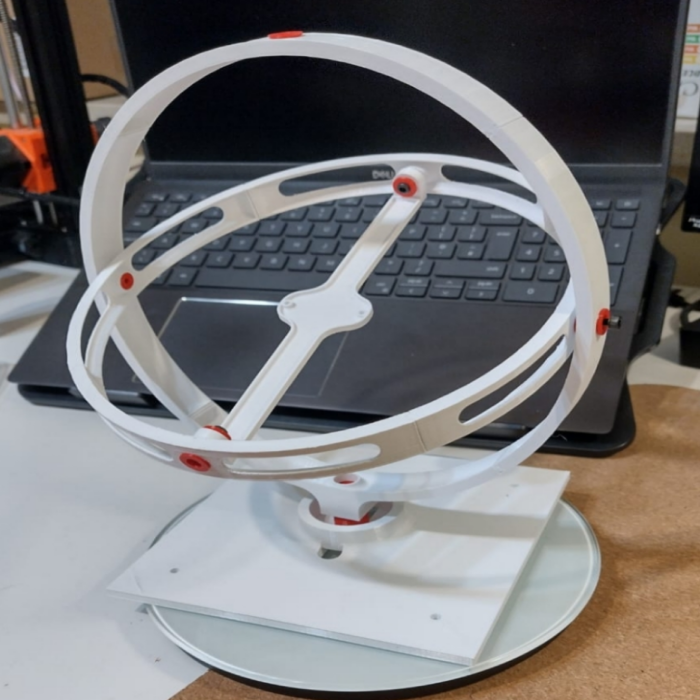
Crazyflies (and other drones in this weight class) are extremely fun to fly and prototype with! But if you are also a scientist or tinkerer and not a well-skilled drone pilot then you might struggle with flying these platforms especially when testing new control loops or experimental code. While crashing also teaches a lot about the behavior of the system, sometimes we are interested in seeing the system dynamics without breaking the drone.
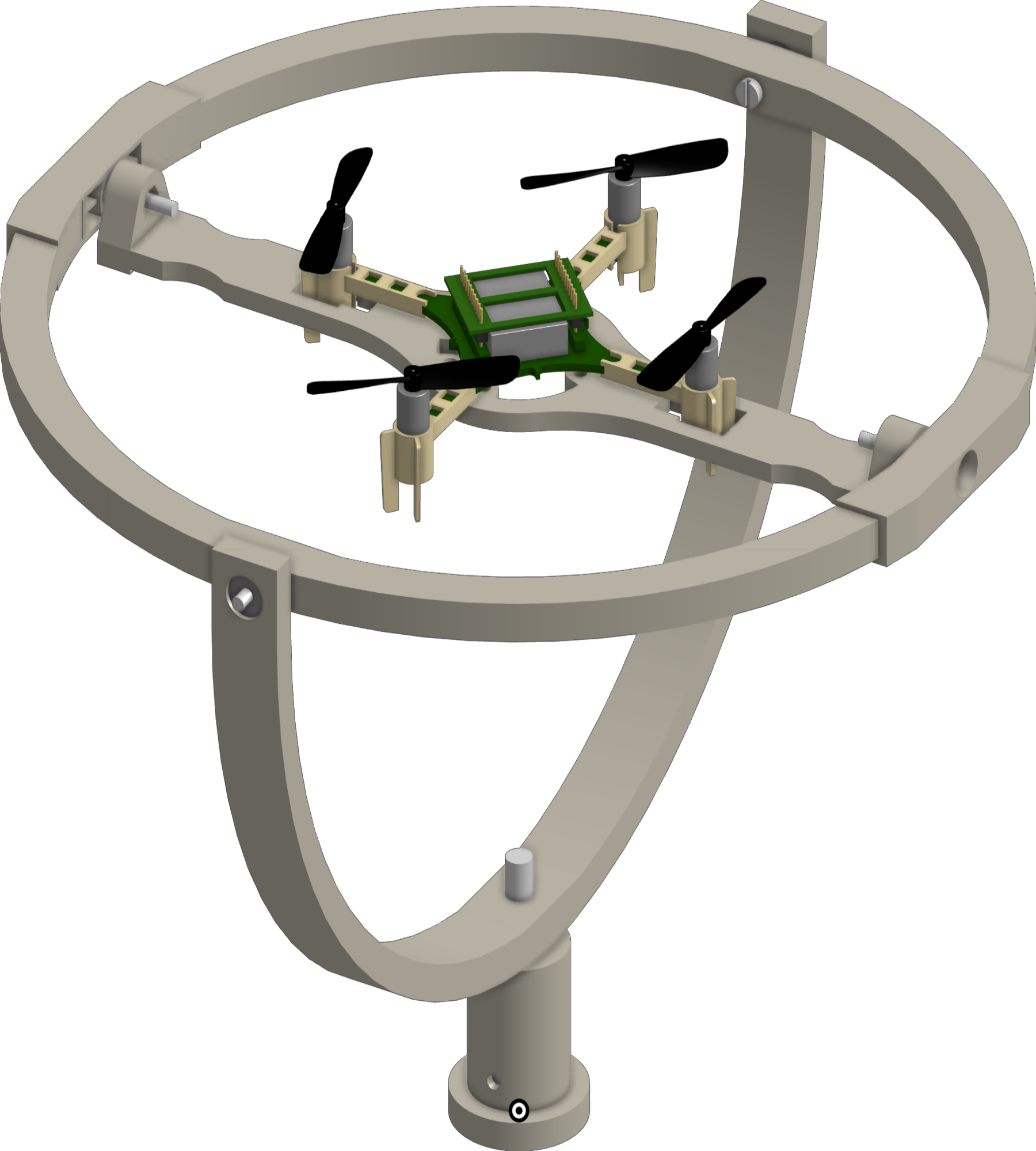
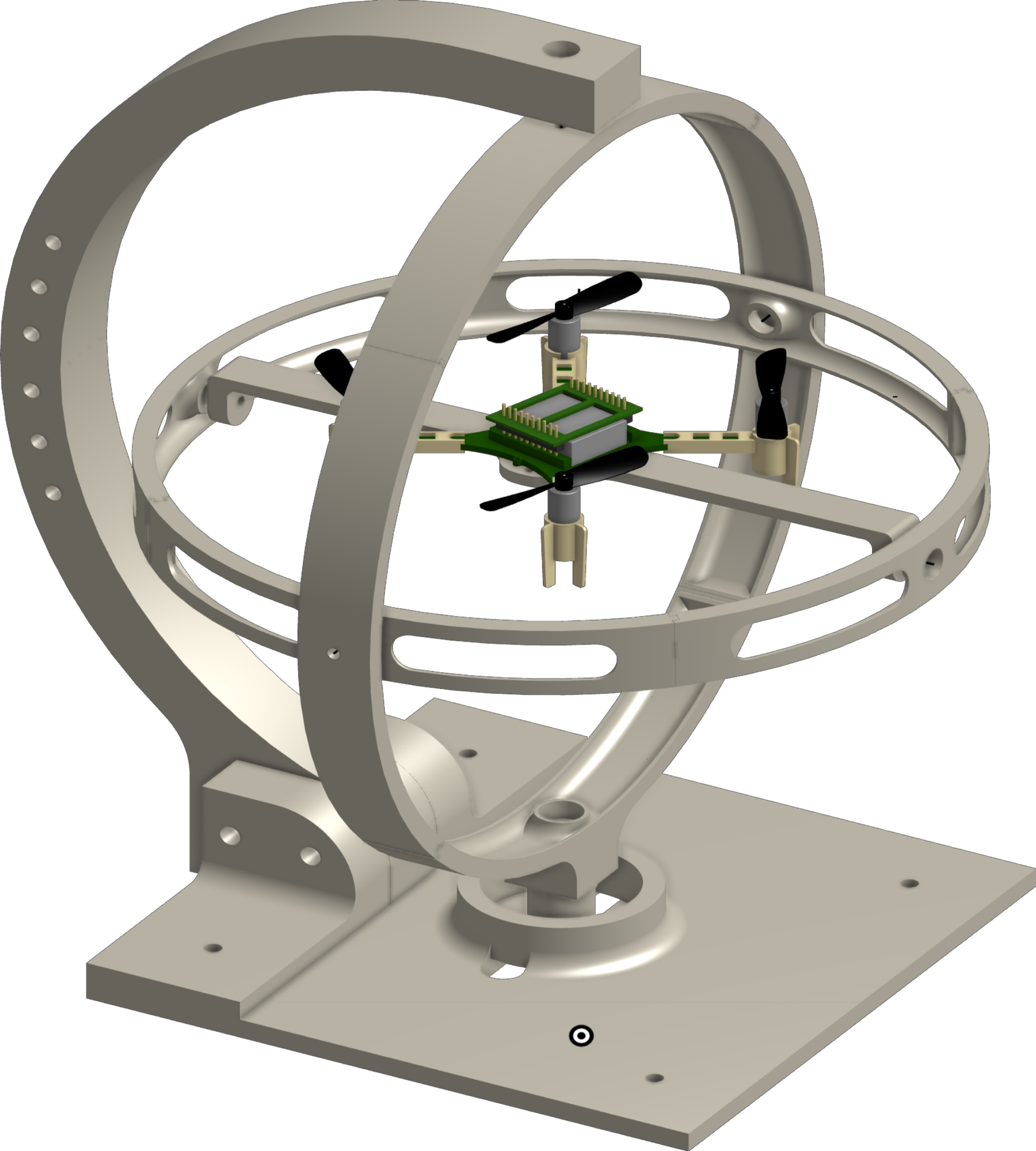
Currently, doing this for such small drones is not easy. We need something lightweight and still accessible. To solve this, we made Open Gimbal: a specially designed 3 degrees of freedom (DoF) platform that caters to the unique requirements of these tiny drones. We make two versions, (a) Tripod version which can be mounted on a camera / light tripod with a screw thread of sizes 1/4-20 UNC or 3/8-16 UNC (b) Desktop version which can be placed on a table top.
Tripod VersionDesktop VersionCAD models of the different Open Gimbal versions you can 3D print and use.
Our approach focuses on simplicity and accessibility. We developed an open-source, 3-D printable electro-mechanical design that has minimal size and low complexity. This design facilitates easy replication and customization, making it widely accessible to researchers and developers. The platform allows for unrestricted and free rotational motion, enabling comprehensive experimentation and evaluation. You can see the movement from the CAD version below:
Degrees of Rotational freedom that Open Gimbal provides
You can also check out the interactive CAD model and see how the gimbal moves here. All of the 3D model files as well as the BOM and instructions for assembly can be found in our repository here.
In our publication, we also address the challenges of sensing flight dynamics at a small scale. To do so, we have devised an integrated wireless batteryless sensor subsystem. Our innovative solution eliminates the need for complex wiring and instead uses wireless power transfer for sensor data reception. You can read all about how we do this in our paper here.
If you do end up using the platform for research then you can cite us using the details below:
@ARTICLE{10225720, author={Sharma, Suryansh and Dijkstra, Tristan and Prasad, Ranga Venkatesha}, journal={IEEE Sensors Letters}, title={Open Gimbal: A 3 Degrees of Freedom Open Source Sensing and Testing Platform for Nano- and Micro-UAVs}, year={2023}, volume={7}, number={9}, pages={1-4}, doi={10.1109/LSENS.2023.3307121}}
Open Gimbal at European Robotics Forum 2023 in DenmarkOpen Gimbal in use at Prof. Leszek’s lab in PolandOpen Gimbal at TU Delft, NetherlandsOpen Gimbals with Crazyflies mounted in the wild!
I hope that you find the Open Gimbal useful! Feel free to reach out to me at Suryansh.Sharma@tudelft.nl if you have any ideas/questions or if you end up making an Open Gimbal yourself!
It’s been some time now that we’ve tried to grow the Bitcraze team. Since we’re a small team, it’s been hard to put the time and energy into recruiting; and even though we’ve been looking for a new Bitcrazer for a long time, things haven’t progressed as much as we liked.
That’s why we’ve got some help. We are now working with a recruitment agency to help us reach the right people, and their insights and advice have been of great value in us figuring out exactly what kind of person we wanted, and how to phrase it in the right way to get the right person.
So we now have a new job post, that you can read here in its entirety, but which I will summarize here:
We’re looking for a production and quality manager – embedded developer. Someone that is not only a skilled embedded developer, but is also interested in our products’ production: running it, synchronizing with our partner in China, developing production tests… Having a passion for technology, production and quality is a big plus.
As usual, no roles is set in stones here at Bitcraze. Being part of a small company means that everyone has the opportunity to be involved in all parts of it ; we get to build the company we work in. With that comes freedom and responsibility! The way we work is unlike any other, and we know from the Covid experience that working remotely is nearly impossible for our process. That’s why that person should be ready to move to Malmö, Sweden. But, as I’ve explained in a precedent blogpost, coming to work at Bitcraze comes with great advantages.
While this role is one that we’re currently actively trying to fill, you’re always welcome to openly apply for a job at Bitcraze. Don’t hesitate to send us an email at jobs@bitcraze.io and tell us who you are!
One detail that has its importance: unfortunately, hiring someone from outside the EU takes time and energy; with a lot of paperwork and a much longer timeframe. That’s why we’d prefer if the person we hire has EU citizenship.
Dev meeting
Next week is already time for our next dev meeting! This time, we will talk about how to handle the increasing complexity of the expansion decks. We’ve seen some issues with the increasing complexity of the expansion decks, and had some ideas for solutions moving forward that we want to share!
Lately we have been thinking about and using the Rust programming language more at Bitcraze. In this blog post we will talk a bit about our current use, current experiments and potentially future use and how it will affect our ecosystem.
Rust is a system programming language that has good performance, is reliable and productive. Practically it means that it can be used to run small and fast code (well suited for embedded systems for example), be quite fun to write, and be reasonably sure that if it compiles, it works.
On servers
Over the year we have written and maintained a server system to handle a lot of things related to production and sales. This system is the one generating shipping quote when you order in our store, telling us that there is an order, printing packing lists and shipping labels for the order as well as keeping track of stock and telling us when it is time to order a new batch of product.
This system is used every day and has been invaluable to how we work at Bitcraze. It is mostly implemented as NodeJS micro services.
We have started writing new functionality for it in Rust instead of in a new monolithic service. This has been a great experience, not always easy, but the bonus is that once it compiles there has been almost no run-time error. This has allowed us to gain experience with Rust in an environment that is well documented: servers on PC.
In test rigs
Every manufactured product must be tested: there is no guarantee a board will work when it exits the re-flow oven. This test usually happens in a test-rig that measures and affects various signals on the board (look under your favorite Bitcraze deck and you will see test-points: round pads designed to enter in contact with test probes). Attached to this test-rig is a computer running our test software. We have used a Python-implemented test software for all our products so far and this system started showing its age by being harder and harder to work with and, most importantly, hard to deploy on computers in the factory.
For Crazyradio 2.0, we decided to completely re-write our test software, in Rust of course :-). The design of the test framework is very inspired by OpenHTF: the framework provides the basic architecture of the test and the executor, tests are implemented in Rust and implement all the required test phases. Test statuses are streamed to a web browser as well as to our server (to one of the newer parts of our server system written in Rust). There are two big advantages of using Rust in this application: making sure the test software works reliably and without errors saves a lot of time during manufacturing and helps make sure no bad board leaves the factory. Rust is also awesome to deploy and distribute: the software written on our Linux machine can be compiled for Windows/Mac/Linux on any architecture, no more Python environment to set up!
As for the deployment we actually choose to deploy the test software on a Raspberry pie managed by Balena cloud. This means that we can remotely update the test rig software and we are always sure that the right version is running in production. Rust has allowed that to be painless: we develop on our amd64 PCs and it compiles out-of-the-box and works on the ARM64 Raspberry Pi.
In embedded systems
Now we are coming to our more experimental use of Rust, until now on fun-Fridays project but soon on prototypes. We have been playing with Rust on embedded for quite a while: I have re-written the Crazyflie2’s stm32 boot-loader in Rust, we have experimented with Rust on a couple of our ESP32-based prototypes. Embedded systems are never as easy as programming on PC and the way Rust libs are organized to guarantee good usage of the peripheral does not always yield good error messages from the compiler. But, for sure, it does not feel good and it feels very scary to come back to C: the Rust compiler checks so many things that it makes programming fun, with C, any small mistake will bite hard a couple of weeks later.
We have just started working seriously on a new deck (more about it in a future blog post ;-) and we have started in Rust. We do still take that as an experiment: we keep our options open to coming back to C if there is any hiccup. But so far it looks quite good.
In the Crazyflie lib?
That is a future plan, that we have not started to work on seriously at all, but that we are planning for the future. We are planning to write a new version of the Crazyflie lib in Rust with binding to other languages.
According to our experience so far, Rust is safe, fun to write, and very easy to distribute to all the systems we currently support with the Python lib and more. On top of Windows/Mac/Linux, Rust would enable support of our official lib on the web, in embedded systems (ie. ESP32), as well as on iPhone and Android.
The plan would be to have the low level of the lib, ie. communication with Crazyradio and the Crazyflie and subsystems drivers, implemented in Rust. Then binding to Python, C++, Ros, Javascript, … can be made to allow usage of the lib in these languages. This would have the advantage of allowing every current user to use the official lib without having to re-implement their own special-purpose version. On the Python side, nothing would change, in the sense that a Rust-implemented lib can be installed with “pip install cflib” …
Conclusion
This blog post is a request for comments: if you are a user of the Crazyflie and have strong opinions for or against Rust we would like to hear about it. We want to make it clear that we are not planning on porting the Crazyflie firmware to Rust: the Crazyflie is designed as a development platform and we are aware that Rust is not yet as used or well-known as C or Python. However, the firmware running on a deck CPU or in the bottom of the lib would benefit a lot from Rust’s advantages and do not need to be modified so often outside Bitcraze (it is of course always open-source and we encourage contributions :-D).
We will keep you updated if we make more progress on the new deck and the lib, in the meantime we will keep having fun experimenting :-).
The python client is based on Qt and we have been using version 5 so far. Qt5 has been replaced by Qt6 quite some time ago and as Qt5 is not really maintained any more, we have been looking at switching to Qt6 for a long time. Finally we have taken the step, this blog post will outline what has changed.
The switch to PyQt6 is not that complicated for the majority of the client code base, apart from some minor changes in various classes, the biggest update is that enumerations are handled differently. If you check out the changes in the pull request you will see that imports have changed for obvious reasons
The main blocker for doing this change has been that the Qualisys tab was using a library that used to be available in PyQt5 but that has not been added to PyQt6, we ended up removing the Qualisys tab to be able to move on. The Qualisys tab was originally contributed by Qualisys for demo purposes and it had two nice areas of functionality that we would like to re-implement:
Motion capture positioning. It was very easy to connect a Qualisys mocap system and feed the position information to the Crazyflie for automated flight.
Trajectory support. It was possible to fly some simple trajectories, for instance a circle which is nice for testing and demos.
The idea is to re-implement the mocap connectivity using the libmotioncapture library from Crazyswarm2, as an extra bonus this would support all major mocap systems. For the trajectory part, we would like to add this as a new tab that can be used by any positioning systems, mocap, Loco, Lighthouse or flow deck. If you are interested in helping out with this, let us know!
The state of the code
The changes for PyQt6 have been merged into the master branch. It seems to work but we have not tested all functionality yet, please let us know if you run into any problems or weird behavior.
When you have pulled in the code from github you will also have to re-install all dependencies by running
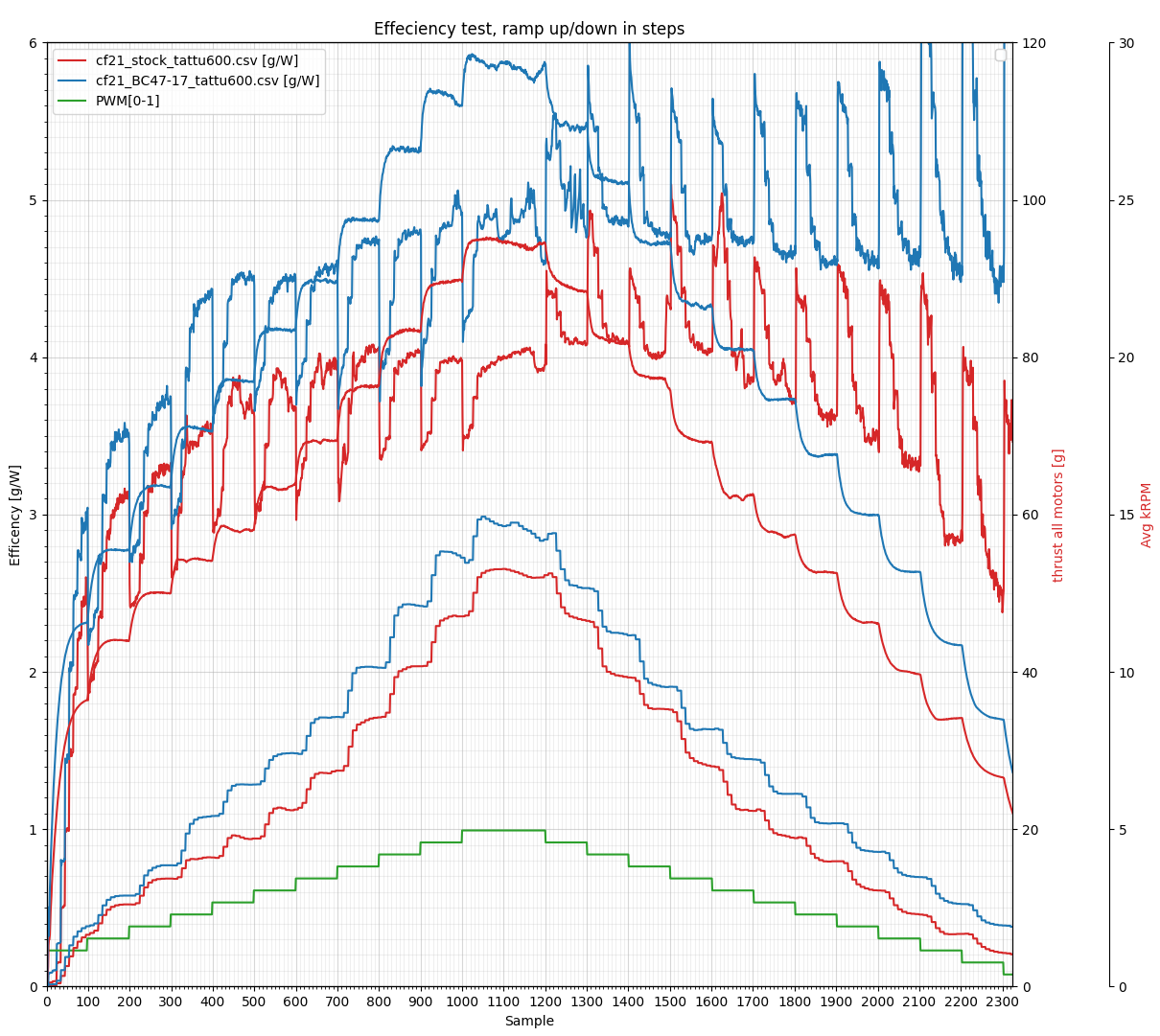
Last week our brand new 47-17 (47mm diameter, 17mm pitch) Crazyflie 2.X propeller became available in black and green in the shop! It is a custom designed propeller for the 0.8mm shaft, 7×16 coreless brushed motor, that comes with the Crazyflie 2.X. The improved design boosts the efficiency, both flight time and maximum thrust is increased with up to 15%. It is made in polycarbonate (PC) which makes it more durable so that it will withstand crashes better. The new propeller is better then the stock 45-17 in almost all areas except in noise where the new 47-17 propeller runs at a higher RPM. Below is a graph comparing the two propellers using the thrust stand we previously built. The graph is a bit messy but hopefully you can figure it out! The big takeaway is that the 45-35 propeller tops at ~4 g/W while the 47-17 tops at ~4.7 g/W using the stock 7×16 motor.
The Crazyflie 2.1 kit will continue to be shipped with the “stock” 45-35 propeller. At some point we want to switch to the new propeller in the kit. We don’t know when this will happen yet and will of course announce it here at that point :-).
After a nice (but rainy) summer, everyone is back at the office and we’re coming back to business as usual at Bitcraze. This blog post is dedicated to various bits of news, in order to get you caught up on what’s been happening during the summer.
Dev meeting theme
There were no dev meetings in August to allow everyone to rest and enjoy their vacations, but after this hiatus, we’re back in the saddle! The dev meeting will happen, as usual, on the first Wednesday of the month, so the 6th of September, at 15.00 CEST.
This month, Arnaud is going to talk about the lib: what is its current status, its architecture, and some hopes we have for the future. As usual, we’ll have a short presentation, and then a discussion; you can also join if you have more general questions or feedback. If you’re interested and willing to take part in this discussion, you can check the information on Github: https://github.com/orgs/bitcraze/discussions/884
Chargers out of stock
Some items were out of stock during the summer (like the HQ propellers) that we thankfully received soon after we came back. Unfortunately, one product is still not available: the battery charger. Since it’s part of the Swarm bundles, it also means that the bundles are out of stock too. But the wait for their restocking shouldn’t be too long, as they are scheduled to arrive around the end of next week. We’re hoping it’s not a big inconvenience for you and we thank you for your patience!
Problems with payment
We’ve noticed that some of you had some problems getting their payment through in our shop. If you’re one of the unlucky ones who faced this issue, we apologize for the inconvenience, and we want you to know we’re working with our payment provider to figure out a solution. This, unfortunately, can take some time because of the number of parties involved (there’s us, the payment provider, different banks, so the situation gets quite complex quickly). In the meantime, if you should encounter such a problem, don’t hesitate to send us an email at contact@bitcraze.se and we can help out. It would also help us to know who is facing this issue.
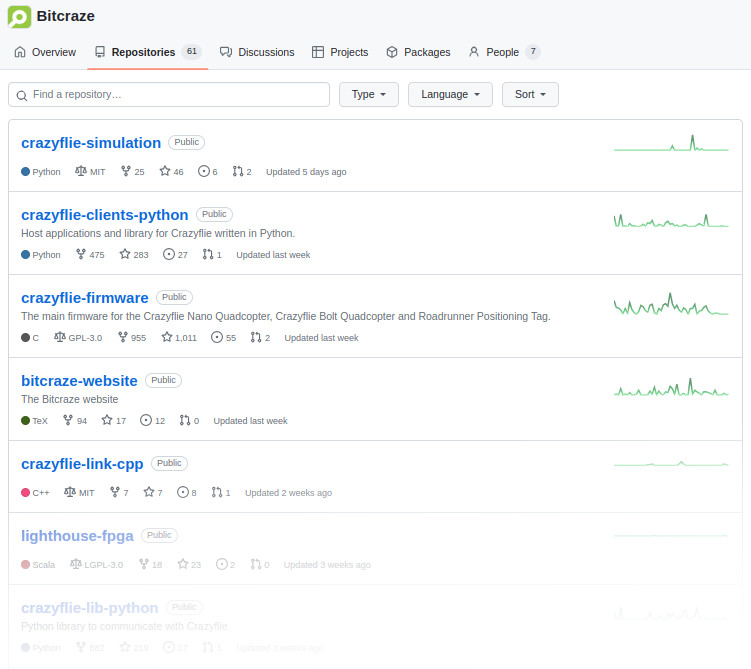
The Bitcraze organization page on github contains some 60+ repositories and if you are looking for a specific piece of code it might be hard to know where to find it. In this blog post we will try to describe how the repositories are organized and hopefully make it easier to understand where to start your search.
The Bitcraze repositories contain code and information related to a wide range of applications and products, some might be of interest to many users, while others have a smaller audience. Examples are software for the Crazyflie and decks, but also things like simulation, tests, hardware and our web site. As we try to be as open as possible most of the content we produce will end up in a repository, which obviously increases the number of available repos over time. For most users there is usually only a handful of repositories that are of interest though so let’s create some order.
The main repositories
There are three repositories that are the hot spots of most functionality, these are usually the first place to look and the only repositories most users will ever use. You can find quick links to these repos in the “Pinned” section on the Bitcraze github start page.
The repositories are:
crazyflie-firmware – the source code for the STM processor firmware on the Crazyflie. This is where most of the important Crazyflie functionality is implemented, such as controllers, estimators, motor control and communication with decks. If you want to change a behavior in the Crazyflie itself, look here.
crazyflie-lib-python – the python library used to communicate with the Crazyflie. This is used to control a Crazyflie remotely. Use it if you want to use a script to control a Crazyflie, also contains lots of examples of how to do common tasks.
crazyflie-clients-python – a the python client that is used to connect to the Crazyflie. The client is simply a GUI that uses the python lib to communicate with the Crazyflie. Everything that is done in the Client can also be done by a script using the python library.
Another source of quick links to common and important repositories can be found on our web, on the Repository overview page. This page also contains short descriptions of the repositories.
Related repositories
Many of our products are implemented as multiple sub-systems, perhaps using different languages or technologies and running in separate hardware, in most cases we separate these sub-systems into their own repositories. The rule of thumb is that these repositories are named in a similar way to indicate that they are related, for instance lighthouse-bootloader and lighthouse-fpga that contain code for the lighthouse-deck. However note that in most cases there will also be related functionality implemented in the main repos as well, in the Lighthouse deck case for instance, most of the actual positioning functionality is in the crazyflie-firmware repo while Lighthouse system management is implemented in the lib and client.
Bootloaders
When powering up a CPU there must be a small piece of code available that sets up the basic configuration of the device to enable it to communicate with other parts of the system, like memories and such. This code is usually called a bootloader. Bootloaders are rarely changed and in most cases written to the device as a part of the factory production process. They have their own repositories and you can find a bunch of them, named XXXXXX-bootloader. Bootloaders are not that interesting and can be ignored by most users.
History
Some repositories might have names that do not make sense in the current context, this is most likely due to historical reasons. We might have given a repository a name that seemed to be descriptive at that time, but as time goes by it might not be as good any more. An example is the range of “LPS-XXXXX” repositories that contains code for the Loco Positioning System. Originally LPS meant “Local Positioning System” as this was the only positioning system we had, but when we also created the Lighthouse system we changed the meaning of LPS to “Loco Positioning System”. A better naming of the repositories would perhaps be “Loco-XXXX”?
A similar transition also exists for the Crazyflie that has evolved from Crazyflie 1 to Crazyflie 2.0 and 2.1. Some repositories (named “crazyflie-XXX”) were created when Crazyflie 1 was released and have evolved to be compatible with Crazyflie 2.X, while some other repositories (named “crazyflie2-XXX”) were created when Crazyflie 2.0 was released. Even though crazyflie-firmware is not compatible with Crazyflie 1 anymore, it still has the old name.
Retired code
Some repositories are obsolete, maybe they contain experimental code that is no longer of interest or perhaps the functionality has been implemented elsewhere. We try to archive these repos and if you are looking for current functionality you can safely ignore any repository that is marked with the “Public archive” flag in github.
Still unclear
There is a short description in each repository that is intended to describe the contents. It is possible (likely) that the description was written a long time ago, with a different context and that it might not be as helpful as intended. If this is the case, just ask us. Drop a question in our discussions forum or send us an email, we try to help as much as we can!
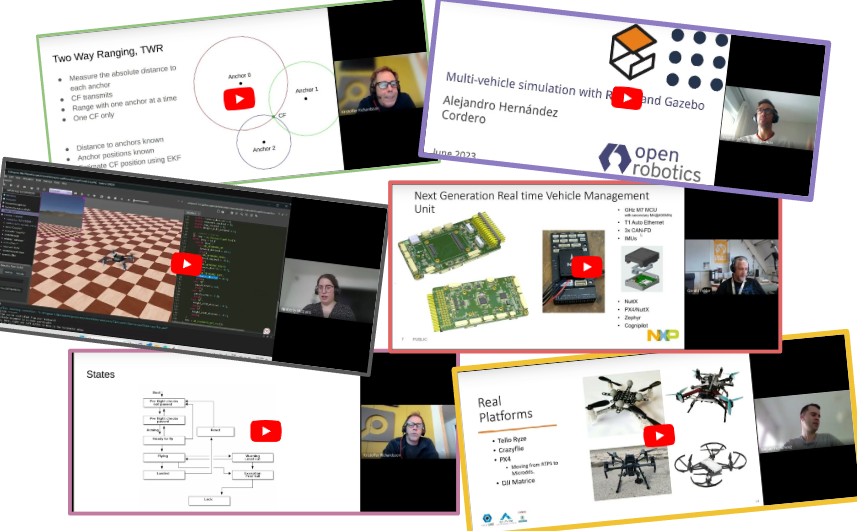
As of this year around March/April we started with both Bitcraze developer meetings and Aerial-ROS meetings (the latter in collaboration with Dronecode Foundation). Now that summer is around and our office is a bit empty, we had a bit of a summer break, however we will start the meetings back up again soon! The next ROS-aerial meeting will be on the 16th of August and we will also have a Bitcraze developer meeting planned on the Wednesday the 6th of September (keep an eye on our announcements in discussions). In this blogpost we like to take the opportunity to show an overview of the meetings we had so far.
Aerial ROS meetings
In March we started a [ROS community working group] for aerial Vehicles together with our friends at Dronecode foundation, aka Aerial-ROS! We have biweekly meetings with some standard discussion meetings (with a topic) and with an invited guest presentation.
We already had a couple of developer meetings before but we started recording them since April. The first recorded one was about the loco positioning system. Here first we gave a presentation about the system itself, with the latest developments cooking in our pot and time for questions afterwards.
Dev meeting about Loco positioning.
Then we had a meeting about the development of safety features in the Crazyflie in light of the Bolt developments:
Bitcraze Dev meeting about Safety features.
Then we had a meeting where Kristoffer highlighted the autonomous swarm demo we showed at ICRA 2023.
Bitcraze dev meeting about the autonomous swarm demo
And the last before the summer holiday, we had a meeting where Kimberly explained about the Crazyflie simulationmodel intergrated into Webots
Bitcraze Dev meeting about Simulation
We are still planning to have developer meeting every first wednesday of the month starting with September 6th (keep an eye on our announcements in discussions).
EPFL 101 Crazyflie presentation
Oh yeah, by the way, we also were invited by the EPFL-lis lab to give another Crazyflie 101 presentation in Lausanne last April! We made a prerecording of it so you can check it out right here:
This early summer my research group (Center for Project-Based Learning at ETH Zürich) was in charge of a special week – high school students from all over Switzerland (actually even the world, they had to speak German though) could apply for a study week at different departments from our university. The departments which joined this initiative were mathematics, physics, biology, environmental sciences, material sciences, and our department, electrical engineering and information technologies (ITET). But how do you show teenagers between 15-19 in one week as much as possible from electrical engineering while also having fun? And best inspire them to study at ITET? Our solution was: drones. More specifically, Crazyflies. With those we had many possibilities to learn about electrical engineering – from sensors, microcontrollers, timers, and motors to LEDs, batteries, embedded systems, FreeRTOS tasks, state estimation, and controller – and all this with a high fun potential and a low risk of accidents, as with their weight of only 30g they hardly ever do any damage. In this blog post, I will guide you through our week, in hopes to help others who also want to use the Crazyflie to teach students about electrical engineering in a fun way.
Monday
We started in the afternoon (in the morning they had a welcoming tour) with a short introduction and splitting the 20 students into groups of two (everyone got a paper slip and had to find the matching one, accelerometer gyroscope, pitch roll, UART SPI, and so on – this gives the lecturer a great opportunity for interaction with the students later on, once their word gets relevant during the week). After a short introduction to programming and microcontrollers we moved on to the most classic beginner task: blink an LED! We chose to use the front left one, as this one is only used when communicating – so as long as we don’t connect to the drone we can observe exactly what we programmed. Most students got the LED turned on rather quickly – however, pulsing the LED to change the intensity took them some more time and forced them to learn how to write loops. They also already learned how PWM works without knowing it yet – setting the intensity of an LED or the strength of a motor is about the same thing in the end after all and this gave us a great start for Tuesday.
Tuesday
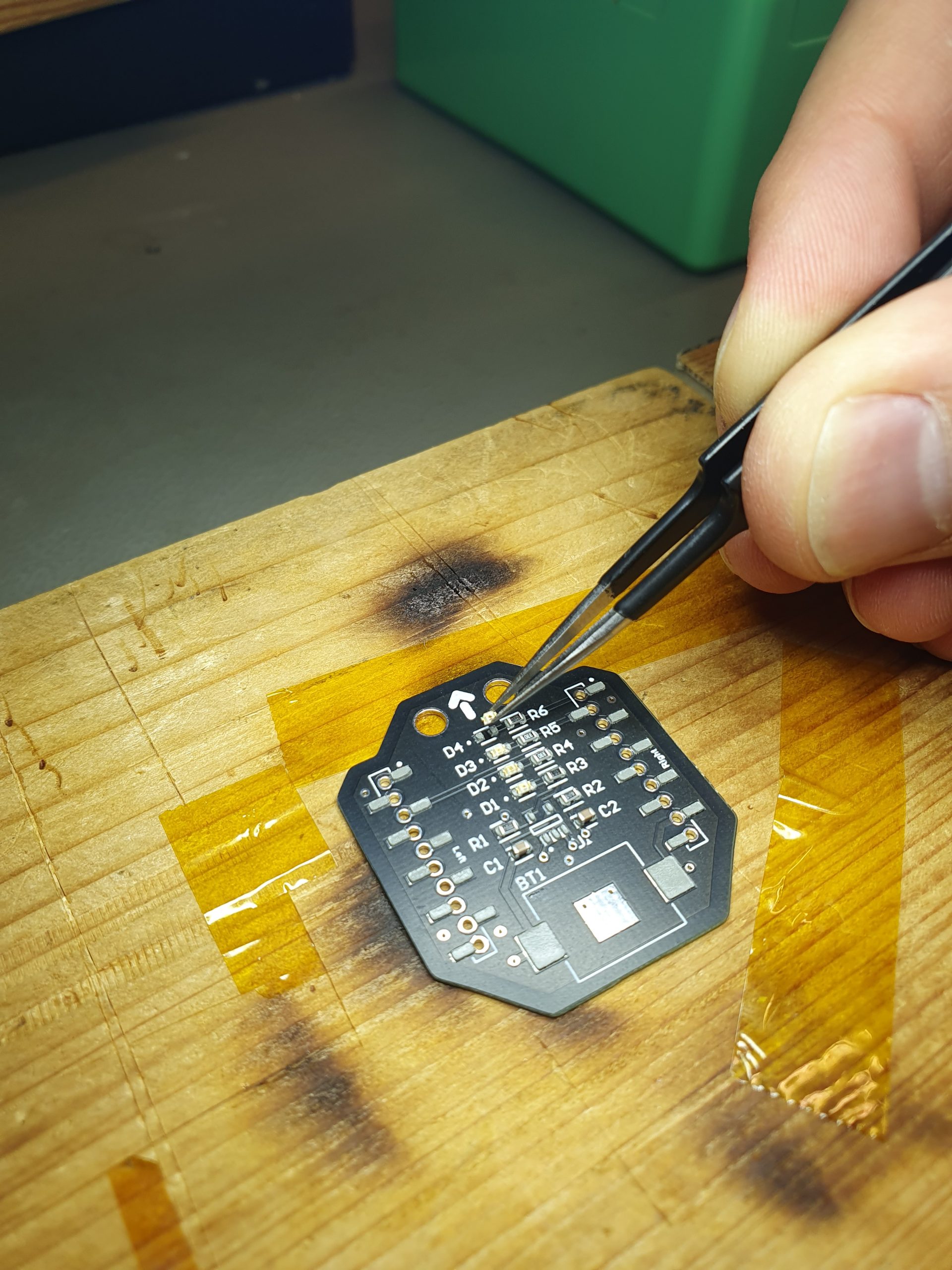
On Tuesday we looked at hardware from different perspectives. As you might have guessed, we looked at motors and how to control them with PWM and timers. The students were a bit disappointed that we still didn’t fly, but as soon as they realized that they could play their favorite song on the motors the motivation was high again! We didn’t even have any stray drones, even though we let them mount the propellers (the songs sound much better with propellers). We also looked at another aspect of electrical engineering: PCB design (this was already done though) and soldering. For this, we prepared a custom deck, with four colored LEDs, which could be populated like in industry with solder paste and then soldered with a hot plate. To make it even more fun (and partly to show off our laser cutter) they also designed a small plastic diffuser that could be mounted on top. So in the end our setup resembles the LED ring – however, it can be mounted on top which is essential if you don’t want to fly with a positioning system (and therefore need to mount a flow deck).
Wednesday
Trying out the state estimation
Now that we knew how to blink LEDs and, even more important, how to control motors we had to learn a bit about how the drone actually figures out which motor should be turned on and how much. For this, we first looked at sensors and wired communication protocols, such as I2C (for the IMU and time-of-flight sensor), SPI (for the optical flow), and UART (to the nRF) – due to limited time we didn’t go into details here though. We briefly touched wireless communication, to explain how the commands they will later send to the drone (and the firmware) are actually sent to the right drone.
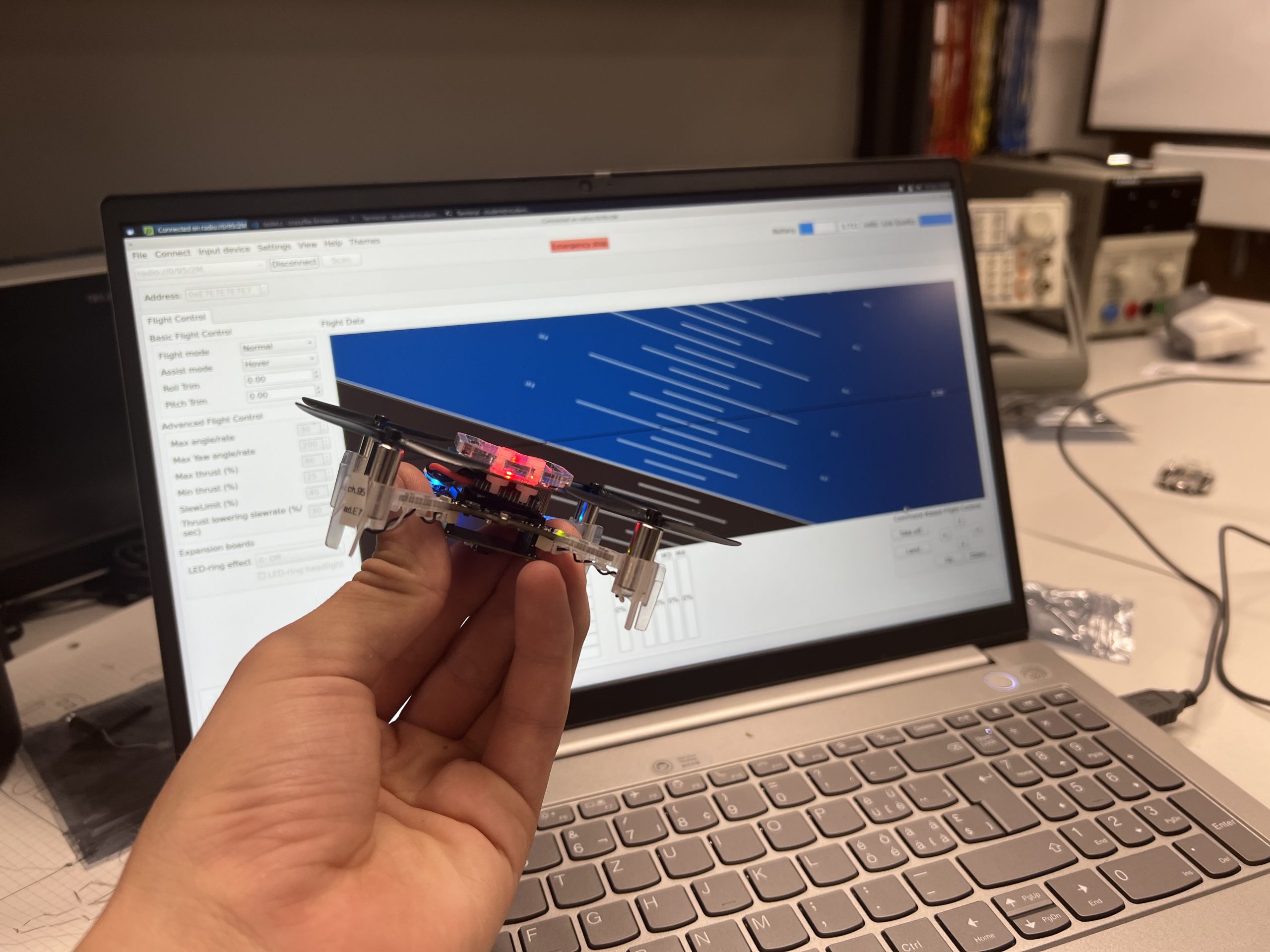
Tuning PIDs
We moved on to what state estimation is in general – again jumping over all details of an extended Kalman Filter, but had a closer look at the logging and parameter system. We then spent a bit more time on the PID controller again – which was also a bit hard to explain, as half the teenagers hadn’t learned how to integrate and differentiate yet. However, they learned fast and we could move to the part they waited for all week long: Flying (and tuning the PID).
Thursday
Transport drone
This was the day that was meant for creativity – the students could choose themselves which project they want to achieve. We proposed them some ideas, such as blinking LEDs depending on the height, flying through a gate (the challenge here is to filter the height measurements when the gate border is below the drone), steering the drone with the keyboard, soldering an own sensor on a break-out board, …
In the end, we saw many cool projects, from a song played as a canon on multiple motors to a transporter drone, flying successfully through the gate, doing a successful looping (unfortunately no successful landing yet…), racing against each other (possibly with disco-lights on the deck) and trials for reaching max speed in the hallway.
The hallway was very popular to fly, as the distance to accelerate was longer…
Practice on the race parkour
The most popular base project was to steer the drone with the keyboard – unfortunately (or fortunately? they sure had fun with it once it was running and they might have learned enough in the remaining week…), this was very easy after we showed them where Marcus’ script lives (here) and which 8 lines (170-177) they have to remove for it to work without an AI-deck (and don’t forget to adapt the URI)…
Friday
Quite an audience!
Flying was forbidden – but playing music with motors was not!
On Friday it was presentation day – in the morning they could still work on their projects, but in the afternoon all the 120 students (and most of their parents) came together in a huge lecture hall to present what they did during this week. And, as at a real conference, they had posters and their drones (which we, unfortunately, were not allowed to fly without a fireproof net… Will organize this next time) to show their projects to family, friends, and even random tourists (the entrance hall of the ETH main building is on many sightseeing tours).
At the end of the week I doubted the robustness of Crazyflies for a moment – however, Monday morning once I had peace and quiet once again I figured out what was wrong with all hardware which ended up on the “not working for unknown reasons” stack in less than an hour (and fixed almost all of it). Notes to all others and my future self for the next time I give 10 drones to 20 teenagers:
If you show them how to tune a PID, also explain that “persistent” means exactly what it says – if you mess up the PID values and persist them they will stay this way until you reset them, no matter how often you reflash the drone.
Explain how fragile connectors are and that you NEVER should pull at cables. Also, mention 10x more to be careful when plugging in decks. And radios.
Keep one “private” drone no one is allowed to mess with – it will help greatly to figure out if they only broke the flow deck connectors or something more serious (which actually never happened)
Doing only warm boots with setting individual addresses with the CLOAD_CMDS while flashing saved us a lot of trouble, randomly connecting to drones only happened once they discovered the app for the phone…
The coding tasks (and at least some minimal solutions) can be found on my fork: Tasks and solutions. They are kept short on purpose – we at the Center for Project-Based Learning believe in our name – we believe the most learning (and fun) happens when you rather freely explore what you can do with the basic tools you just learned.
P.S. For completeness – I cut out all the parts which really had nothing to do with Crazyflies, we also did lab tours in the high-voltage laboratory and the laboratory for optical communication – and of course had some social events with actual university students. As much as we like the Crazyflie, even we have to admit that the field of electrical engineering is even bigger than what we can show with those tiny drones ;)