Earlier this month, ICRA 2022 was in held in Philadelphia and in person this time! Unfortunately we were unable to attend ourselves but quite happy that there were still virtual attendance options available. So I followed quite some presentations and read through papers, trying to find out the latest in Aerial and Swarm robotics and if anybody was able to use the Crazyflie to good use for their research. I even had the opportunity to attend the Exhibition floor with a telepresence robot, which was a lot of fun!
We have covered IROS 2021 end of last year, and we even have started to publish Crazyflie related publications on social media to keep ourselves and the community up to date with any Crazyflie research work. So here we will list the ICRA 2022 papers we have found and write some observations.

Crazy Platforms
What I really noticed this year is that the Crazyflie has been used in more unconventional configurations and new platforms! IROS 2021 ready amazed us by a solar-powered Crazyflie and the 4 times Crazyflie combined quadcopter (which continued this conference by UCLA in (2). But we haven’t seen yet that a Crazyflie can jump! The PogoDrone by the Swarmslab of Lehigh university turned the Crazyflie into an autonomous jumping pogo stick (5)! Moreover, wheels were added by the Institute For Systems and Robotics (TU Lisbon) for increasing the flight/autonomy durability (7).
We also noticed 3 ICRA 2022 papers with Bolt-powered platforms, which is a huge increase compared to IROS 2021 which only had 1 Bolt entry. The MAVlab of the TU Delft compared the Crazyflie against a Bolt-powered Flapper-drone for flying against wind (see the presentation of Flapperdrone in our last MiniBam). Moreover, remember that saw the Science Robotics paper using a Crazyflie board for a dual wing rotating platform. The Engineering product development of SUTD took a similar design to the next level, building a single controllable rotating wing with a Bolt platform (3). Two of these can even work together cooperatively and fly stability, so it is no wonder that they won the ICRA 2022 Outstanding Dynamics and Control Paper Award.
List of ICRA 2022 Papers featuring the Crazyflie and Bolt
Here is a list of all the Crazyflie/Bolt papers featured in ICRA 2022 but let us know if we are missing any (⚡: Bolt, 🐝: Crazyflie). Mind that only Robotic and Automation Letter entries have been officially published on IEEE Xplore already, so from the proceeding papers I tried to share the ArXiv paper if available.
- ⚡ ‘Passive Wall Tracking for a Rotorcraft with Tilted and Ducted Propellers using Proximity Effects’ Ding et al. from City University of Hong Kong & Massachusetts Institute of Technology
- 🐝 ‘A Fast and Efficient Attitude Control Algorithm of a Tilt-Rotor Aerial Platform Using Inputs Redundancies’ Su et al. from UCLA
- ⚡x2 ‘Cooperative Modular Single Actuator Monocopters Capable of Controlled Passive Separation’, Cai et al. from Singapore University of Technology & Design
- IEEEXplore page
- ICRA 2022 Outstanding Dynamics and Control Paper Winner!
- 🐝’Optimal Inverted Landing in a Small Aerial Robot with Varied Approach Velocities and Landing Gear Designs’ Habas et al. from Penn State
- 🐝 ‘PogoDrone: Design, Model, and Control of a Jumping Quadrotor’, Zhu et al from Lehigh U.
- 🐝 ‘Clustering and Informative Path Planning for 3D Gas Distribution Mapping: Algorithms and Performance Evaluation’, Ercolani et al from EPFL
- 🐝 ‘A Bimodal Rolling-Flying Robot for Micro Level Inspection of Flat and Inclined Surfaces’ , Pimentel et al from Instituto Superior Tecnico
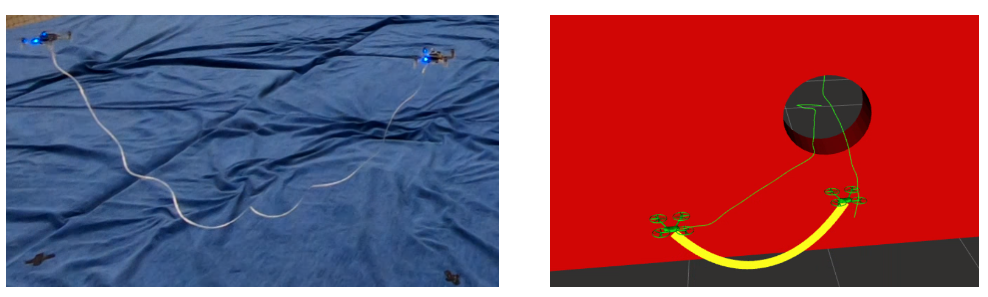
- 🐝x 2 ‘Collision Avoidance for Multiple Quadrotors Using Elastic Safety Clearance Based Model Predictive Control’, Jin et al. from USTC & Sina
- 🐝 + ⚡🦋 ‘An Experimental Study of Wind Resistance and Power Consumption in MAVs with a Low-Speed Multi-Fan Wind System’, Olejnik et al. from TU Delft
- 🐝x 6 ‘Formation-containment tracking and scaling for multiple quadcopters with an application to choke-point navigation’, Su et al. from The University of Manchester.
Updated
11. 🐝x 6 ‘Nearest-Neighbor-Based Collision Avoidance for Quadrotors Via Reinforcement Learning’, Ourari et al. from TU Darmstadt
– ArXiv
12. 🐝x 6 ‘Safe multi-agent motion planning via filtered reinforcement learning’ Vinod et al. from Mitsubishi Electric Research Laboratories
– IEEEXplore page
13. 🐝 ‘Event-Triggered Tracking Control Scheme for Quadrotors with External Disturbances: Theory and Validations’, Goa et al. from University of Shanghai for Science and Technology
– Outstanding Coordination / Mechanisms & Design / Locomotion / Navigation Award Finalists
– IEEEXPlore page
14. 🐝 ‘Watch and Learn: Learning to control feedback linearizable systems from expert demonstrations’, Sultangazin et al. from University of California
– IEEEXplore page
15. ‘KoopNet: Joint Learning of Koopman Bilinear Models and Function Dictionaries with Application to Quadrotor Trajectory Tracking’, Folkestad et al. from Caltech
– IEEEXplore page
Other Announcements: Bolt 1.1 and Dev meeting
Bolt 1.1
The Bolt is now back in stock and with two small updates making it the Bolt 1.1. Here are the changes listed:
- The board thickness has been reduced from 1.6mm to 1.0mm to save some weight, roughly 2 grams. This is handy for the slimmest and most lightweight designs.
- Motor signal output M4 has been moved from PB9 to PB10 to be able to support the DSHOT motor signal protocol in the future.
Other then that it is fully backwards compatible but make sure to use a recent enough firmware (2022.03) that has the Bolt 1.1 device support added.
Time and Date for Dev Meeting
In this blogpost we noted that we wanted to organize our first Developer meeting before the summer break. From this poll we saw that most of you that want to attend are currently located in Asia and Australia, so that is why this time we want to organize the meeting at:
13:00 CEST (Sweden time) on Wednesday 22th of June.
The topic will be about our new support platform and support handling in general, so I’m hoping for some fruitful discussions about that. Keep an eye on this discussion thread for any details for joining.