“What? You are in Japan? Again!?”. Yup that is right! We loved IROS Kyoto 2022 so much that we just couldn’t wait to come back again. Barbara, Arnaud and Rik are setting up the booth as we speak to show some Bitcraze awesomeness to you! Come and say hi at booth IC085.
The gang before the rush starts!
Crazyflie Brushless and Camera expansion
Of all the prototypes we are the most excited of showing you the Crazyflie Brushless and the ‘forward facing expansion connector prototype’ aka the Camera deck. Here you can see them both in action at a tryout of our demo. We have also written blogposts about both so make sure to read them as well (Brushless blogpost, Camera expansion blogpost)
The Crazyflie Brushless flying with a Camera deck.
Also we will explain about the contact charging prototype (see the blogpost here) and will be showing all of our decks at the booth as well. And of course our fully autonomous, onboard, decentralized peer-to-peer and avoiding swarm demo will be displayed as always. Make sure to read this blogpost of when we showed this demo at IROS 2022 to understand what is fully going on!
We will be providing a ‘special disposal service’ for your conference poster! We would love to see what you are working on and get your poster, because we have a lot of space in our updated office/flight space but a lot of empty walls.
If you hand in your poster at the booth, you’ll get a special, one-of-a-kind, button badge that you can wear proudly during the conference! So we will see you at booth IC085!
My name is Joseph La Delfa, I started in December last year as an industrial postdoc at Bitcraze. This means I work across Bitcraze HQ in Malmö and the division of Robotics Perception and Learning at KTH in Stockholm. I have been designing and researching interactions that involve bodily control of drones for a few years now.
In order of appearance: Demonstrating at a conference, mucking around with the Qualisys tab, coaching at Drone Arena I, playing judge at Drone Arena II, and finally Drone Chi.
Here at Bitcraze I will be using lighthouse decks on the body to control Crazyflie/s, with the aim to produce a wearable sensor that integrates into the Bitcraze ecosystem. The lighthouse positioning system is showing great potential for this application as it gives relatively clean and high-fidelity positional data. Plus now that more than two base stations can be used, we can potentially track the deck from top down and bottom up.
Three motor-less crazyflies are strapped to my arms and tracked using two lighthouse basestations.
This research is a continuation of my PhD thesis, where I designed drone interactions that respond differently to different people, and advocated for a human-drone relationship that evolves over time. Ultimately I hope to demonstrate new use cases for the Crazyflie and expand the already impressive community of researchers who use Bitcraze products!
How to Train Your Drone was a one-month field study in a shared home, where three housemates taught their drones how to fly.
This industrial postdoc is funded by the Wallenberg AI, Autonomous Systems and Software Program (WASP), and you can find out more about my work at www.cafeciaojoe.com :D
Dumping and loading persistent parameters to and from a file
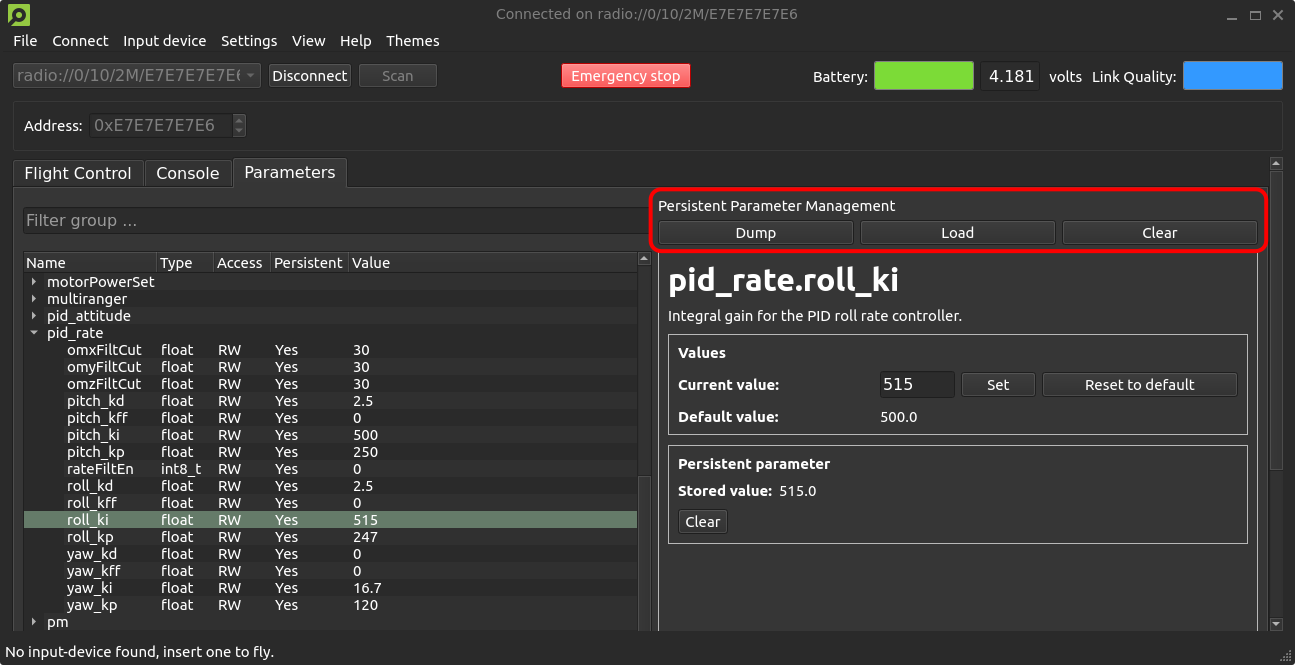
We have a small quality-of-life update that will allow users to dump and load persistent parameters to and from a file that has recently been merged #PR443 and #PR706. A new persistent parameter management area is introduced to the parameters tab of the client, with buttons for dumping and loading persistent parameters, as well as clearing all stored persistent parameters from the Crazyflie. The persistent parameters are stored in .yml format, allowing for manual editing if desired. If you have any improvement suggestions please drop us a comment!
A new persistent parameter management area is introduced to the parameters tab of the client, with buttons for dumping, loading and clearing stored persistent parameters.An information dialog notifies users of the dumped persistent parameters and their values. Loading parameters will result in a similar pop-up.A confirmation dialog prevents accidental clearing of persistent parameters.
System-id code merged to master
Back in 2021, we created the system-id deck which we talked about in this blog post. It has not been officially released but a few users have gotten some PCBs and built it themselves. The functionality for the system-id deck has previously been in a branch, but as code in branches tends to become outdated, we have now moved this into the master branch utilizing the kbuild system instead. Building for the system-id deck is now as easy as doing “make sysid_defconfig” and then compiling. While talking about the system-id deck, let’s check the interest of releasing it as a product. It can help with system identification, tuning of controllers, improving efficiency etc. With enough interest there might be an economy in manufacturing it.
Out of stock
Unfortunately, we’re out of stock of Crazyflies at the moment. We expect some at the end of next week, so hopefully, you should be able to find them back in the store quickly.
Developer meeting
The next developer meeting will be on the 6th of March 2024, Arnaud will talk about the Crazyflie Client past, present and future, based on its last blog post. The client is still very useful but starts to show its age so we are looking at what should be kept, what should be improved and what should be removed. We will present what we have in mind, please come and discuss with us so we can shape the next 10 years of Crazyflie client!
The Crazyflie client has a quite long history, like a lot of things in the Crazyflie ecosystem it has been started when the Crazyflie was used alone using mainly manual control. It has evolved to follow new use-cases of the Crazyflie but it still has traces of its origins and some limitation are still there with us. Moreover, the Crazyflie client and lib are written in python, one the main goal was to make it easily cross-platform. Unfortunately making a cross platform graphical program that accesses hardware in Python has proven to be quite challenging and we feel Python is not the way to go anymore. In this blog post we would like to discuss a bit the current state of the Client and what we are looking at for the future.
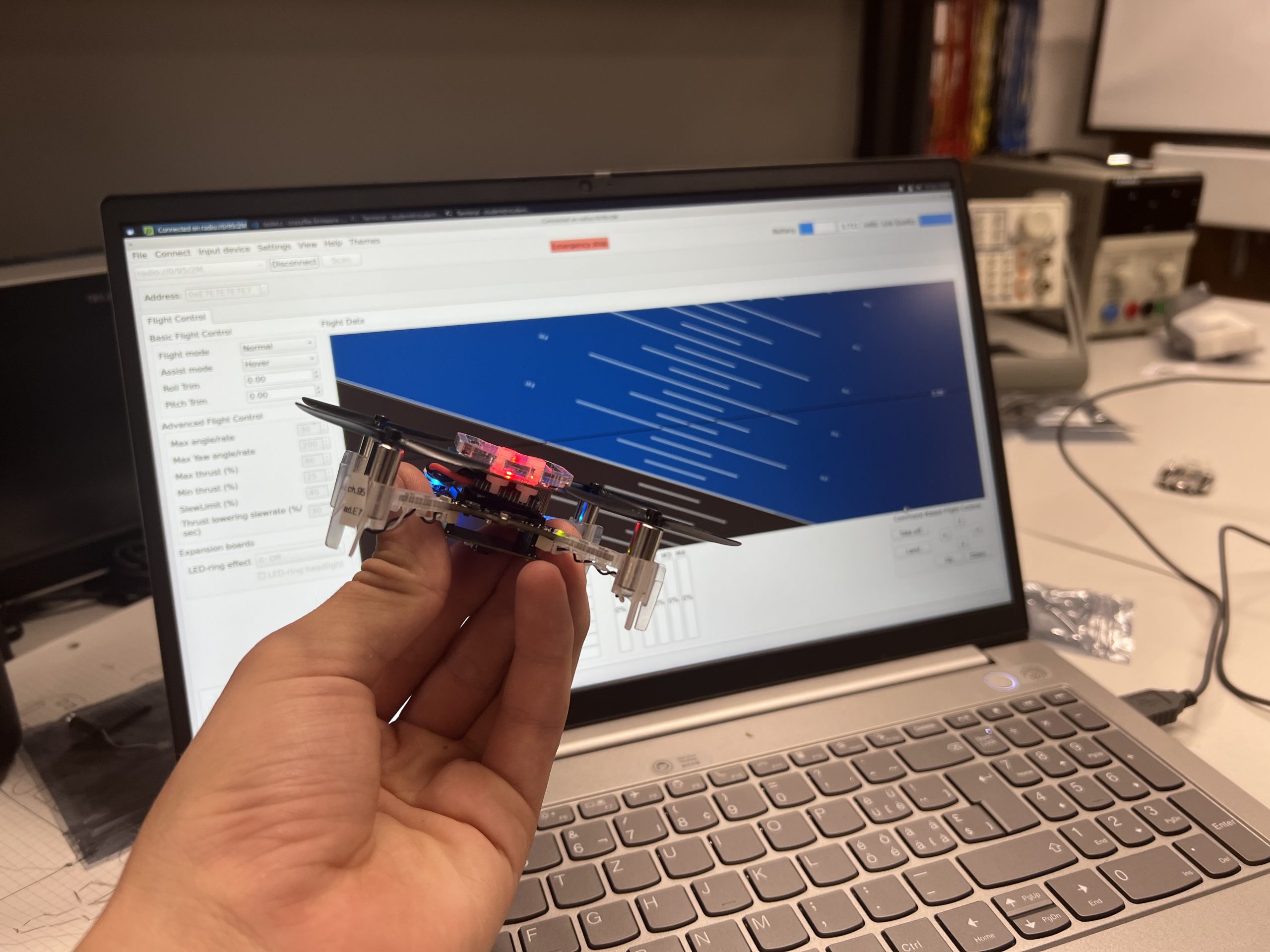
A Crazyflie connected to the CFclient
The Crazyflie client was originally design to be able to fly, inspect and work with one Crazyflie. It still serves this purpose quite well: with the client you can connect your Crazyflie, observe graphs of internal log values in real time, setup different decks and sets and store parameters. It is a very good tool to explore and work with the Crazyflie.
However, it is only working with one Crazyflie at a time will take over the radio, so another script cannot talk to the Crazyflie at the same time using the radio. Unless the script uses the ZMQ API that allows an external program to control client and so to control the Crazyflie while the client is connected and active. This functionality can be very useful but, since it is disabled by default, has not seen a lot of use.
The worst, for us, in the current client state is Python and PyQT distribution situation: we used to have an easy-to-use installer on windows, a Linux Snap package and plan for a Mac App. All these have been pretty much abandoned because they kept breaking down over time and the support weight for us was too big. So the only way to install the client is via Pip, the python package manager. This means that you already need a well setup Python environment to run the client. That is nice unless you have a Mac or a Raspberry pi: the latest MacOS broke part of the client that prevents it to run and there is no PyQT build for raspberry-pi available on PyPi. This is the kind of paper-cut that keeps happening at regular interval with distributing a Python application and that we keep having to look at.
So, we have been looking at ways to improve the situation. The Crazyflie client is more than 10 years old now, so a rewrite would not be such a crazy thing to consider. There are at least 2 angle of attack to make a new client better suited for the next 10 years of Crazyflie development:
Multi-platform and distribution
Making a multi-platform program is and will always be challenging. However, we have discovered that doing it in a dynamic interpreted language like python is even more so. The main challenge come from the fact that things tend to break on the user side depending of the user configuration: we all run a slightly different version of python, python evolve and package management evolves as well, so when things break it breaks at random depending of how up-to-date a particular system.
One solution would then be to switch to a compiled programming language. This increases the probability of finding problem at compile time and not at runtime, which means that we will hopefully be the first to know then Apple decided to change the location of one fundamental piece of library and so allow us to hopefully fix the problem before any user is impacted (assuming we can run CI on the latest version of MacOS early enough…).
So, as you might have guessed, our current idea is to write the client in Rust. We are currently looking at Tauri for the UI which is Web based. We still have ideas of also making a web-client so having a web-based IU on PC would simplify development of that.
We are not letting Python go away though, the idea is still to support Python, but to use it for what it is good at: a great language for developer and experimentation. Rust has great bindings to python so in this plan, the python lib is backed by the Rust lib.
Modularity
The other side of the current client limitation is the fact that it connects one Crazyflie taking over the radio. We actually love using the client to observe and poke the state of a Crazyflie so it would be really great to use it when writing a script or controlling a swarm with Crazyswarm. The current ZMQ implementation was designed to solve this issue, but it goes at it the wrong way around: the client becomes the gateway to the Crazyflie and must always be ON. It would be much nicer to be able to launch the client to connect and inspect a Crazyflie currently control by a script.
One design we are currently looking at would be to use use a protocol like Zenoh between the client and the lib. Basically, when connecting a Crazyflie, be it from a script or from the client, a server would be launched in the background that would handle the connection. All communication would pass through this server and so multiple programs would be able to communicate simultaneously with the Crazyflie.
This would allow us to build easily bridges to ROS to get the client to communicate with a Crazyflie currently connected in ROS. And since ROS2 is working on supporting Zenoh officially a bridge might not even be required.
As an added bonus, the Crazyflie server idea would greatly improve the situation when it comes to supporting Virtual Machines and WSL on Windows: it would move the USB connection handling to a Windows program and only require fast network connections which is something that works really well on WSL or VMs.
Conclusion
In this blog post I have tried to describe our current challenges and some way forward we see. The main message though is that we want to change things when it comes to the client, if you have wishes or ideas now is a good time to get in touch. Let’s make the next 10 years of Crazyflie client problem-free.
This week it will be a bit of a different blogpost than you are used to read from us. Usually we talk about cool prototypes, explain bits and pieces from the Bitcraze ecosystem or let external parties/researchers show case their awesome work that they’ve done on the Crazyflie. Today’s blogpost will be more about a societal topic that plays a big part within the robotics world: diversity! Bitcraze is helping out with the Diversity Scholarship of this year’s ROSCon, which we’d like to advertise about, but is also complimented by some words about diversity in robotics and how this topic is reflected upon within Bitcraze itself.
Diversity & Robotics
It’s widely acknowledged that the field of robotics lacks diversity. While there have been improvements, significant underrepresented groups remain, including women, individuals in LGBTQIA+ communities, people with disabilities, and those from racial and/or ethnic minorities. There are some interesting communities to look into if you are part of these groups yourself. However, if you know of any other ones that are interesting, of course, let us know.
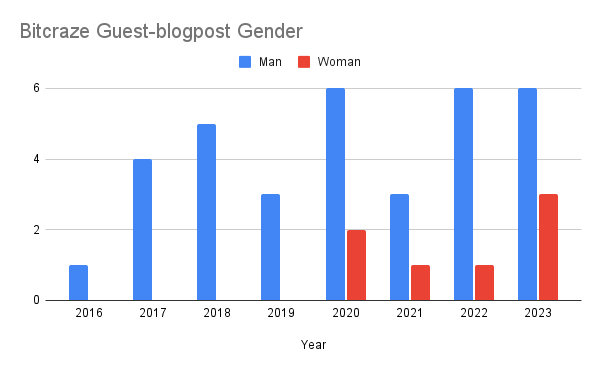
Other than these earlier mentioned groups, we do not regard ourselves as the absolute expert on diversity in robotics, but we have perhaps a simple but interesting statistic to share from our experience. We usually receive requests for guest blog posts on our website from external researchers and engineers looking to showcase their work with the Crazyflie. We thought it would be interesting to graph the gender distribution of these guest bloggers:
Gender of our guest blogposters on bitcraze.io
As you may have noticed, before 2020, all of our guest bloggers were male, and only in recent years has that changed. It’s also worth mentioning that to our knowledge, none of the bloggers has openly identified as anything other than cis-gender male or female. While this shift represents progress, it’s important to acknowledge that there is still room for improvement. Additionally, it is essential to recognize that this tiny statistic does not fully reflect the diversity of the robotics community but rather (perhaps) pertains to a specific subset, such as aerial robotics.
Diversity & Bitcraze
So let me just cut to the chase, Bitcraze is a very small company with currently only 6 full-time employees. Currently, we don’t have any formal policies on hiring and promoting diversity. However, we do have a very open culture within the company where we can discuss these topics at our coffee breaks without restrictions or judgment. There is a genuine interest in sharing and discussing negative experiences related to the lack of diversity at previous workplaces, so we do talk about it a lot.
In terms of our impact internally and externally, for now, we don’t come across enough hiring opportunities to implement diversity policies. We can perhaps also invite more diverse guest bloggers to contribute to our website, or make our developer meetings more welcoming. However, there is only a limited influence that we can exert here with our small company. Therefore, the choice to support other communities we love to improve diversity is perhaps the most we can do to contribute to this cause.
We are already involved in the ROS community by helping out with the ROS aerial community working group (blogpost1, blogpost2) and we loved the atmosphere during ROSCon when we were in Kyoto. When the opportunity arrived to be a co-chair of the diversity committee of ROSCon 2024, together with Belén Torres from Wymaq, we gladly took it and are hoping that is were we can make more of a difference.
Diversity Scholarship at ROSCon 2024
This year’s ROSCon will be held in Odense, Denmark, between October 21st and 23rd. Since 2016, the ROSCon organization has launched a diversity scholarship opportunity, and this year’s event is expected to be the biggest one yet. Individuals belonging to the underrepresented groups in robotics, as mentioned earlier, are invited to apply for the scholarship. The deadline is April 5th, so please don’t wait too long to apply. Check here for the ROS discourse post and here for the diversity scholarship application on the ROSCon website.
Today we have a guest blogpost by Simon D. Levy (Washington and Lee University) about using Haskell to warp parts of the Crazylife-firmware. We also have some announcements from Bitcraze itself at the bottom. Enjoy!
As Richard Feynman famously said, What I cannot create, I do not understand. My less ambitious version of this motto is What I can translate into another language, I might better understand.
In order to better understand the Crazyflie firmware, I first undertook to translate the C-based firmware into C++. By separating out the general-purpose algorithmic code (state estimator, closed-loop control) from the Crazyflie-specific / Hardware Abstraction Layer (HAL) component of the firmware, I ended up with a nice, header-only C++ library of algorithms that can work with both a simulator like Webots and on a Crazyflie 2.1 or Crazyflie Bolt flight controller (with the remaining Crazyflie firmware translated into the standard C++ .h/cpp format).
As a fan of functional languages like OCAML and Haskell (and Rust, which was strongly influenced by their approach), I wondered whether I couldn’t push this idea further, to get an even higher-level implementation of the algorithms. Having played a bit with Rust and encountered issues getting it to work efficiently with C++ (something that is thankfully now being addressed), I thought it might be work trying NASA Copilot, a Haskell extension that compiles Haskell into C with a fixed memory footprint (i.e., no malloc() or garbage-collection).
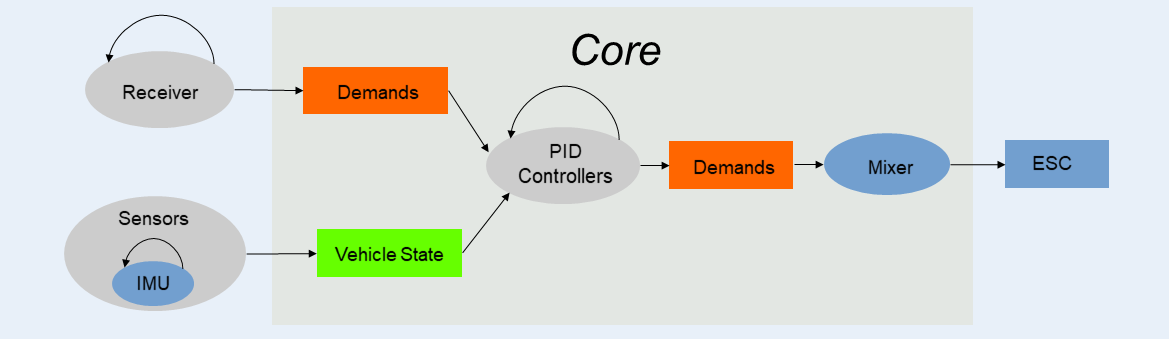
My efforts paid off, resulting in a Haskell library of algorithms for closed-loop (PID) control and motor mixing that works with both my modified version of the Crazyflie firmware and with a simulator like Webots. For anyone wondering “why Haskell”, I refer you to this excellent discussion on the language’s advantages (purity, elegance), as well as this classic presentation on why the functional programming offers a better solution to complex tasks than object-oriented approach. For example, the code in the LambdaFlight core module cleanly reflects the dataflow (input/output) diagram for a standard flight controller:
Here is the Haskell code corresponding the component labeled Core in the diagram:
— Clock rate is 500Hz for Crazyflie, 100Hz for sim
dt = rateToPeriod clock_rate
— Make a list of PID controllers based on application order
pids = [positionPid resetPids inHoverMode dt,
pitchRollAnglePid resetPids inHoverMode dt,
pitchRollRatePid resetPids inHoverMode dt,
altitudePid inHoverMode dt,
climbRatePid inHoverMode dt,
yawAnglePid dt,
yawRatePid dt]
— Run PID controllers on open-loop (stick) demands to get demands for motor mixer
demands’ = foldl (\demand pid -> pid vehicleState demand) openLoopDemands pids
— Adjust thrust component for hover mode
thrust” = if inHoverMode then ((thrust demands’) * tscale + tbase) else tmin
— Run motor mixer on closed-loop demands to get motor spins, scaled for CF or sim
motors = quadCFMixer $ Demands thrust”
((roll demands’) * prscale)
((pitch demands’) * prscale)
((yaw demands’) * yscale)
By adjusting the values of the clock rate and scaling coefficients (tscale, tbase, prscale, …), the same PID controllers (with same Kp, Ki, Kd constants) can be used for both the simulation and the actual Crazyflie.
Two pieces complete the picture.
First, how can a pure functional language like Haskell, lacking mutation/side-effects, support an algorithm like PID control, which requires keeping state variables (error integral, previous error) across iterations? The answer to this question comes from an ingenious part of the NASA Copilot framework, namely, streams. A stream (which is similar to a lazy list in Haskell), can come from an module of the program written in C (for example, the vehicle state obtained by state estimation) or from a previous value passed into the function. This feature allows Copilot to have functions that possess state while still being “pure” in the sense of being amenable to formal verification (mathematical proof of correctness; see this thread for a discussion). Although I don’t have the mathematical background to do formal verification proofs, the ability to prove the code correct is an extremely powerful feature of languages like Haskell and is what led NASA to develop the Copilot framework for its space missions.
Second, how can Haskell be combined with C/C++ without running into the performance issues typically encountered in calling code in one language from code in another? As I alluded to before, NASA Copilot solves this issue nicely, by compiling the Haskell code to C code with a fixed memory footprint. Declaring certain C/C++ variables to be global makes them accessible to the Haskell code as streams, and causes them to be compiled into the resulting C code, which can then be compiled and linked to the Crazyflie (or simulator) C/C++ code in the usual way (thanks to the Crazyflie Makefile’s use of the Kbuild system). Hence, to compile the whole project into a form suitable for flashing with make cload, requires just the following chain of commands (where make links creates links to some external libraries I wrote for the sensors):
make cf2_defconfig && make links && make copilot && make -j 32
My current work focuses on two directions: first, I am translating Crazyflie’s Kalman filter into Haskell — a more ambitious undertaking, but one that I feel more confident in undertaking now that the core control algorithms are completed. Second, I am looking for ways of modifying the most popular robotics simulators (Webots, Gazbeo) to work with dynamics (physics engine) code custom-written for quadcopters and other aerial vehicles (like the dynamics code I wrote for this simulator), as well as faster control loops.
Announcements
There are some announcements that are not part of this guest blogpost that we’d like to share.
The 350 mAh batteries are out of stock and unfortunately have a very long lead time at our manufacturer, so you can expect them to be back in stock early May. Please take a look this blogpost which also compares this battery to the Tattu alternative, if you can’t wait and need to have a similar battery now.
We have a Bitcraze developer meeting this Wednesday to talk about the supervisor safety functionalities in the crazyflie-firmware. Please keep an eye on the GH discussion thread for information on how to join.
There is a new release of the firmware, version 2024.2. The main change, and almost only change, in this release, is the Bluetooth stack that was updated from the Nordic’s semiconductor S110 to S130, which affects the firmware on the NRF51 on the Crazyflie. This was mainly done to be able to pass the listing requirement on Bluetooth SIG, but it will also have beneficial technical effects on the Crazyflie radio communication state of affairs.
The new stack and bootloader are distributed in the normal release .zip, which means that it can be updated from the client as normal. Please note that the latest lib and clients are required as we have had to implement new procedures to flash the bootloader and stack.
First of all, let’s define what is a soft device. Nordic semiconductor radio chips are awesome in the way that the radio hardware is fully documented, this means that we can implement our own radio protocols but we would also be able to implement our own Bluetooth stack (I have attempted that a long time ago with some success, the nRF5 radio hardware is really powerful and can be set up to do much of the work!). However, backing your own Bluetooth stack would require passing a full suite of validation at the Bluetooth SIG to prove the stack conform to specification. In order to avoid that, the usual strategy is to buy a Bluetooth device and to talk to it over UART. What Nordic did is to implement a “Softdevice”, a binary blob that runs in the same CPU as the user application and that talks to the application using software interrupt. This keeps the application completely separated from the Bluetooth stack and so means that we get the benefits of a pre-qualified Bluetooth stack that has already been tested and approved.
Currently, we have ported the bootloader and the nrf firmware to the new S130 stack. This opens a lot of potential benefits for the future:
The new stack should be at least 6 times faster than the old one. This makes implementing BLE communication for the Crazyflie to a PC/Chromebook much more appealing and should allow to make the existing mobile client more full features.
We are now able to update the bootloader, so we can make a new improved version of it in the future (ie. with safe link, swarm optimization, much faster Bluetooth boot loading….)
The new stack supports device and host mode. So things like pairing a gamepad with the Crazyflie becomes a technical possibility! (actual implementation is left as an exercise for the contributor ;-).
One very important thing to note is that working on the bootloader requires a debugger: if you flash a bugged radio bootloader you need a SWD debug probe to be able to fix your Crazyflie. The bootloader+softdevice flashing procedure is very safe, as long as you flash a working firmware.
This change should open quite new exciting possibilities. It will be interesting to see what we can achieve with BLE and updated bootloaders in the future. Please note that we had to make a change to both the Crazyflie python library and the CFclient in order to flash this new firmware so make sure that you update those as well to try out this new release.
Developer meeting
The next developer meeting will be on the 6th of March 2024, we will talk about the Crazyflie Supervisor subsystem… We have made some changes to the supervisor recently, and we will continue working more on it in the next couple of weeks mostly preparing for the arrival of the Brushless Crazyflie. We will talk about the current state and what we are working on. Follow the thread on Bitcraze Discussions to be up to date on how to join!
I’m Rik, and today marks my return to Bitcraze. Some of you might remember me from a couple of years back when I spent a few months here as an intern. Perhaps you’ve even stumbled upon my guest blog post discussing the paper that concluded my master’s degree. I’m thrilled to be back in the fold!
It’s exciting to be back in Sweden. I love to cook, and although traditional Swedish and Dutch cuisine share quite some similarities (a lot of potatoes and gravy), it’s nice to try out new ingredients and foods. Additionally, being close to the great outdoors is a major draw for me. I already went on my first hike and I heard there are some nice bouldering areas not so far from Malmö.
One of the things that initially attracted me to Bitcraze are its close ties with the research community. In fact, it was through my own research as a master’s student that I first encountered the company. I’m eager to deepen these connections further and collaborate with researchers across various disciplines. Combining this with a team of talented colleagues and a vibrant enthusiast community makes it a great opportunity to learn!
I’m particularly drawn to Bitcraze’s unique organizational ethos. The emphasis on self-organization and collective success resonates with me. The idea of continuously shaping our workplace to reflect our values truly excites me.
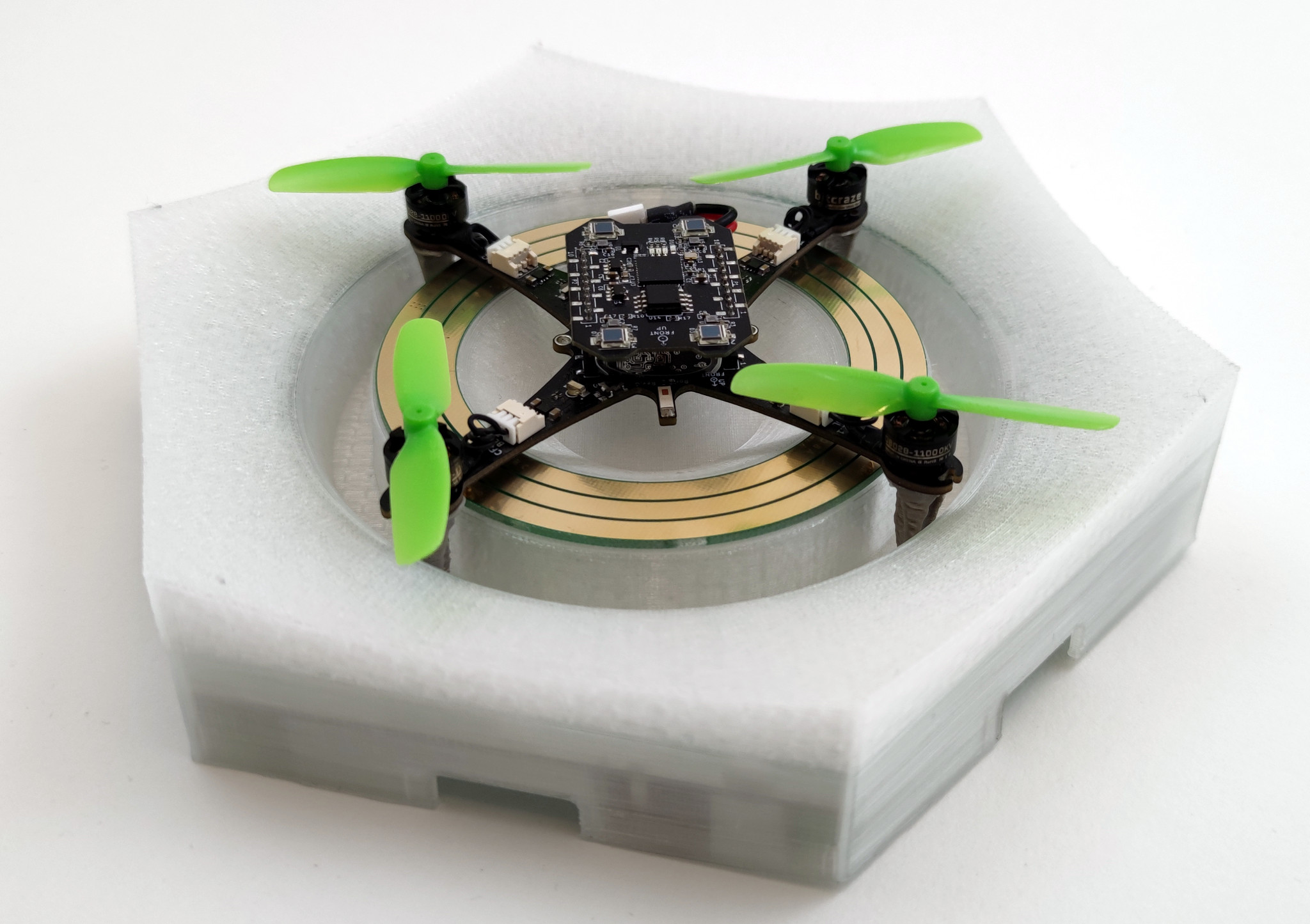
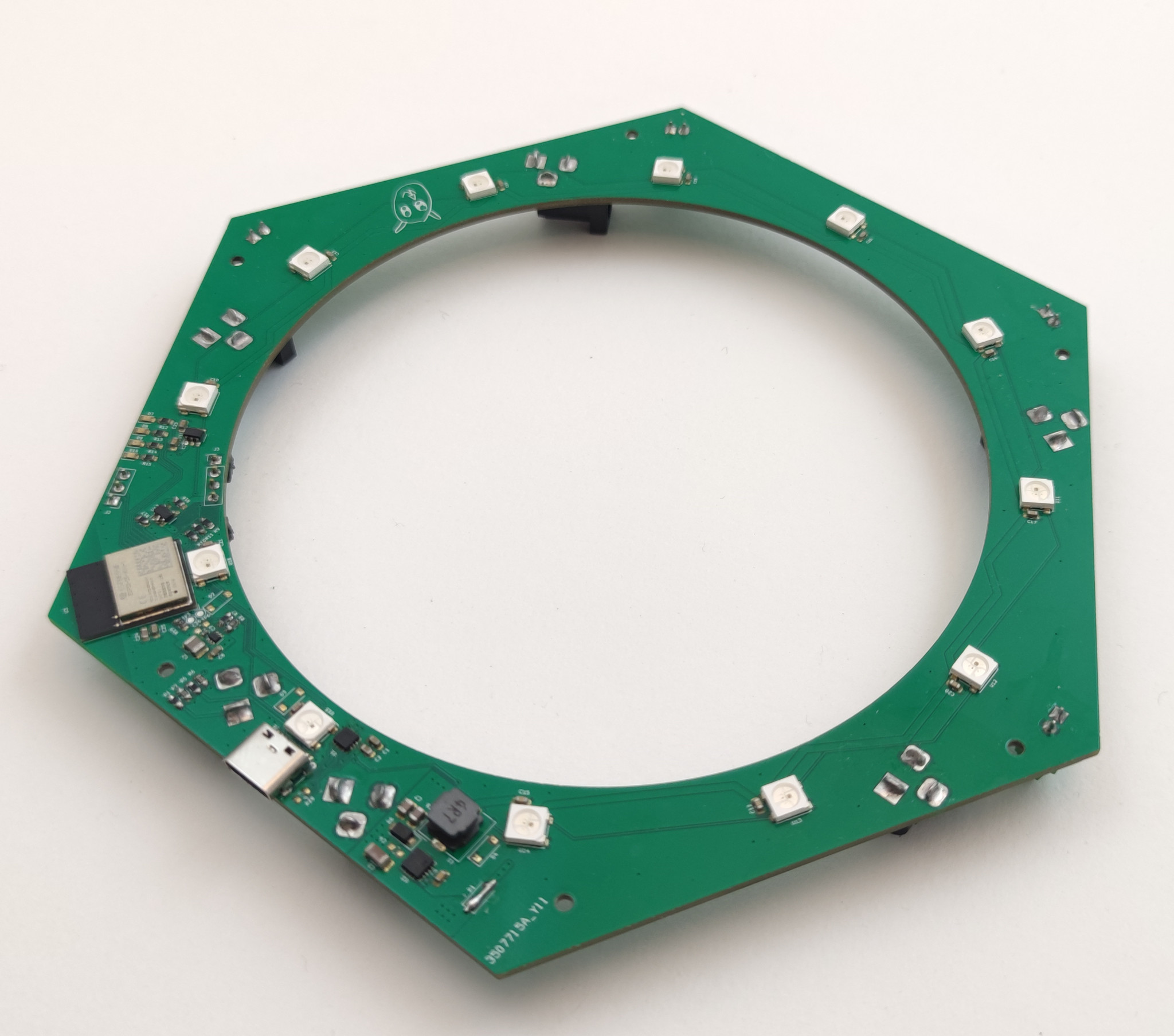
If you haven’t seen it yet then check out our latest Christmas video! In it, we show off a bunch of new stuff, with the main ones being the new Crazyflie brushless and the Lighthouse V2 (which supports up to 16 base stations). But there were also a few other things featured in the video! One of them is the charging pad the Crazyflie brushless takes off from and lands on in the video. This weeks blog post is about the charger, how it came to be, how it works and what lies ahead.
Some history
A while back I worked a bit on a contact charger for the Crazyflie 2.1. The idea was to try and make a design where small pogo-pins could be added to various decks which would allow the Crazyflie 2.1 to charge when lading on a charging pad. Some of the issues with the design was that the area was small (it had to fit on a deck), it put requirements on each deck and that some decks (like the Flow V2 deck) has components which are taller than the pogo-pins. So after the blog post back in 2021 this has been on the shelf, until recently when the Crazyflie brushless work has been moving forward.
With the new prototype design for the Crazyflie brushless being made, there was a chance to address some of the issues I’ve seen before and do another try. All we needed was to add some pads for soldering pogo-pins on the wings (which actually wasn’t as easy as one would think due to layout constraints). So now the charging points didn’t have to be on each deck, they are built into the Crazyflie BL base. The distance between the points is also larger, allowing for a bigger hole in the charging PCB and allowing for a higher variety of decks, like the LED ring with the diffuser shown in the video.
The last missing part of the puzzle was when we needed to do more flight testing with the Crazyflie brushless. We wanted to reproduce the infinite flight demo we previously had for the Crazyflie 2.1, but the current Qi charger pad didn’t work with the new Crazyflie brushless. Time for the next iteration of the charger prototype!
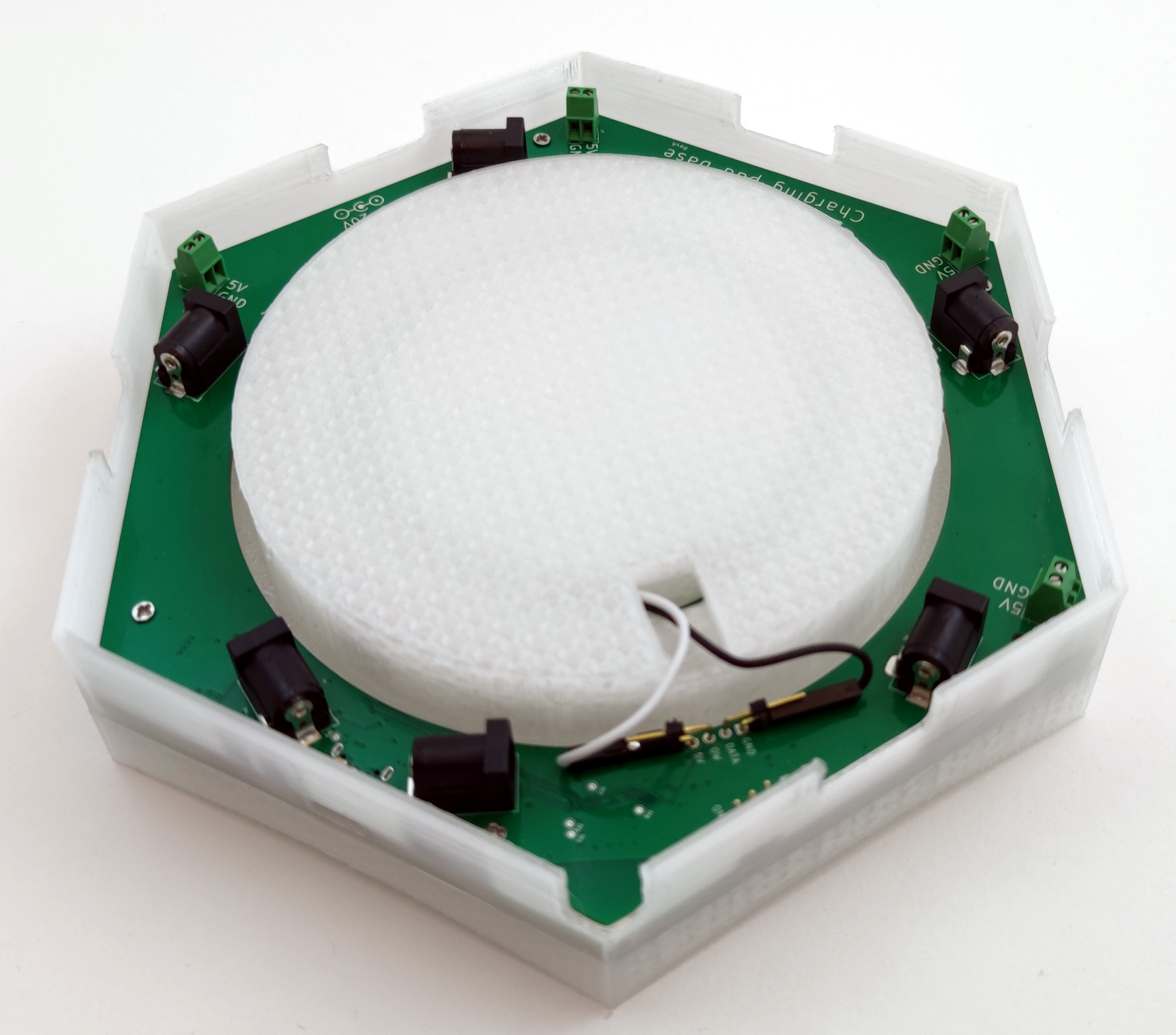
Under the hood
So how complex can you make a charger? Lots! When making a prototype I like to add as much ideas possible to the design. Missing something you wanted to test and doing a new version takes a lot of time but adding some extra crazy ideas might be pretty quick in the design phase. A lot of the time ideas are scrapped along the way, most of the time because of space- or price constraints. Sometimes they are just bad or too complex. Luckily in this case the charger has a large PCB with lots of space and it’s just an early prototype so there’s (almost) no bad ideas!
Under the hood (or 3D printed plastic in this case) there’s a bunch of stuff:
An WiFi/BLE module, the ESP32-C6-MINI
USB-C connector
USB-PD controller
6 DC-jack connectors and 5 terminals for connecting power
Measurement of charging current and supply voltage
12 WS2812B RGB LEDs for the outer ring and 12 for the inner one
20-to-5V DC/DC and 5-to-3V3 DC/DC
Some debugging LEDs and UART
Intended use
The idea with the contact charger has been to easily charge your Crazyflie without disconnecting the battery, plugging in the micro-USB connector or blocking the use of decks facing downwards like the Qi charger does. In addition to this I also wanted to try out some other ideas.
WiFi: For a long time I’ve had a prototype of a server for connecting various hardware to (like a charger) so I wanted to try to connect it to this for monitoring.
BLE: The idea was that the Crazyflie could talk to the charger via BLE to for instance change the light effect.
LEDs (and lots of them): The idea was to give some feedback from the charging of the Crazyflie but also to give the charger the ability to act as something more, like lighting up when a Crazyflie decides to land on it.
USB-PD: This is connected to the chaining of power. The ideas was to connect a USB-C charger and distribute the power from it to other chargers via the DC-jack.
Rust: Like we’ve written about before, we’ve been trying out more and more Rust here at Bitcraze. This is yet another experiment, the firmware for the charger is written in Rust using Embassy.
Future
Currently the charger is an internal project, since we use it in our lab for the infinite flight. But it’s of course something that would be exciting to offer our users if there any interest. So let us know what you think!
Also, don’t forget to join us for this Wednesday’s dev meeting. the main topic will be about the Kalman filters however we can answer questions about the wireless as well!
When our cooperative control lab at the Technical University of Applied Sciences Augsburg was founded a few years ago, our goal was to develop distributed algorithms for teams of UAVs. We quickly decided to use Crazyflies with the algorithms directly implemented in the firmware, thus having a platform for a truly decentralized system. Our ongoing projects focus on cooperative path planning, navigation, and communication.
Since working with several drones at once, which have to communicate and coordinate with each other, can quickly become confusing and very time-consuming, a simulation was needed. It should preferably offer the possibility to integrate the firmware directly in the simulation environment and ideally also offer an interface to the crazyflie python API. With the relocation of our laboratory from Augsburg to the Technical University of Applied Sciences Ingolstadt, which however does not yet have a permanently established flying space, the need for a simulation environment was further increased in order to be less dependent on hardware accessibility. A look at the community and the available simulations quickly led us to the sim_cf flight simulator for the Crazyflie. A fantastic project supporting the use of the actual Crazyflie firmware in software-in-the-loop (SITL) mode and even in hardware-in-the-loop (HITL) mode on a real Crazyflie using the FreeRTOS Linux Port together with ROS and Gazebo. Unfortunately, the project has not been maintained for several years and also had no integration with the Crazyflie Python API. After a short chat with Franck Djeumou and his agreement to use the code of the original sim_cf simulation, the project was ready for an upgrade.
sim_cf2 Flight Simulator
With support for ROS coming to an end we decided to migrate the project to ROS2 and additionally support the current version of the Crazyflie firmware, which at this time is release version 2023.11. With the addition of a driver to connect the cflib to the SITL process, the same python cflib-based scripts can now be used with real Crazyflies and for use in the simulation environment. Only the corresponding driver needs to be loaded during initialization. Overall, the focus of the sim_cf2 simulation is now on using the Crazyflie python API instead of commanding the Crazyflies via ROS.
As for the Crazyflie firmware the whole build process has been fully integrated into the firmware’s KBuild build system. This also allows the use of the same code base for simulation and execution on the real Crazyflie. Depending on the configuration, the firmware is compiled for the STM32F on the Crazyflie or the host system running the SITL.
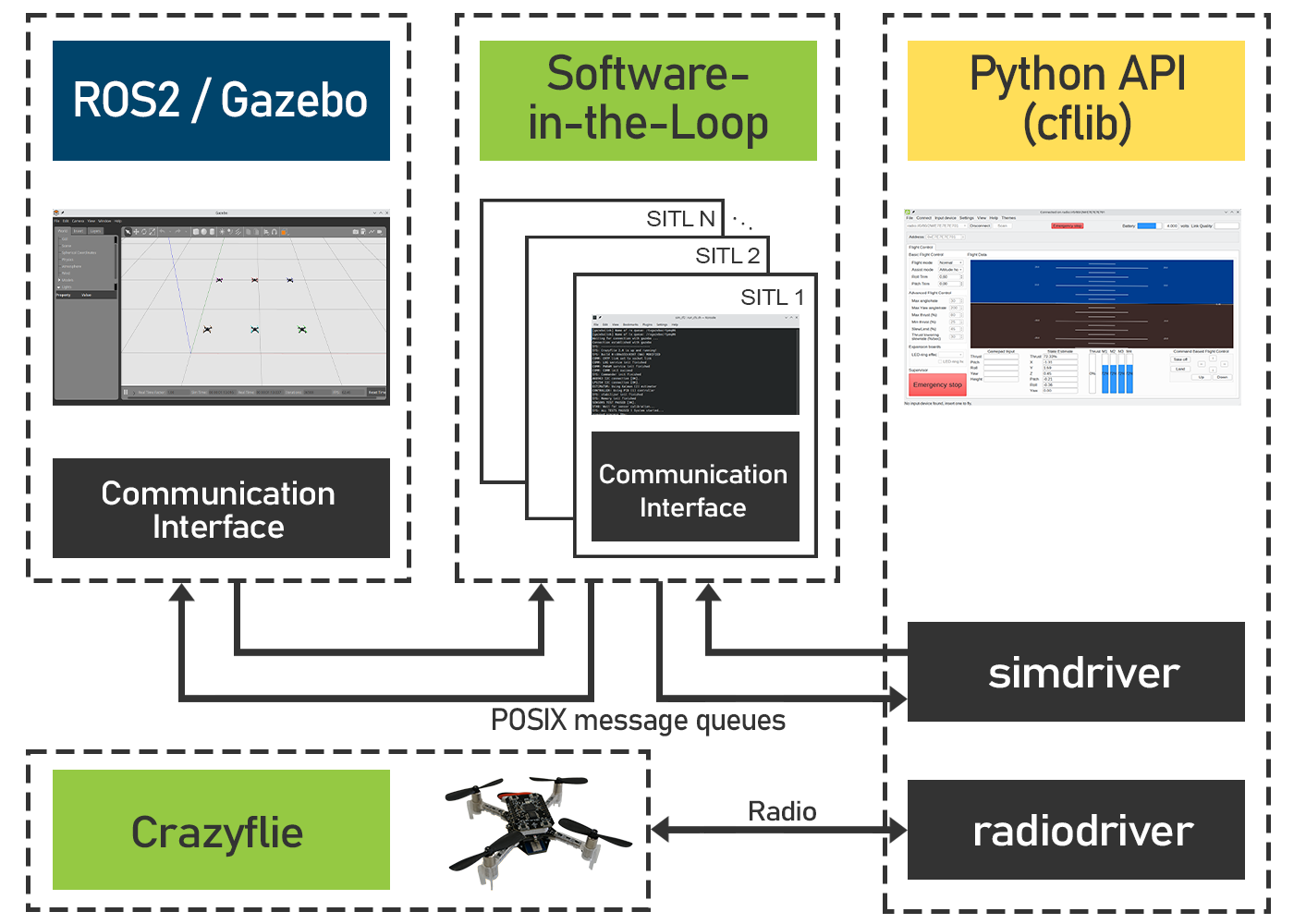
Components of the sim_cf2 Flight Simulator
To run the simulation, the three modules must therefore be started separately. Gazebo is started using the main launch file. The number and initial pose of the simulated Crazyflies is also defined in this file. Once the firmware for the host system has been built, the desired number of SITL instances can be started using the attached script. Finally, a cflib-based script, the Crazyflie client or the multi-agent client presented below is started. With no radio dongles attached to the computer, the simulation driver is initialized automatically and a connection to the simulated Crazyflie can be established.
There are still a few open issues, including the absence of implemented decks for positioning, such as LPS and Lighthouse. Currently, the absolute position is sent from Gazebo to the SITL instance and fused in the estimator. Moreover, Gazebo requires quite a lot of computing power. We were able to run a maximum of four Crazyflies simultaneously on a relatively old laptop. However, a modern desktop CPU with multiple cores allows for simulating a significantly larger number of Crazyflies.
Multi-Agent Client
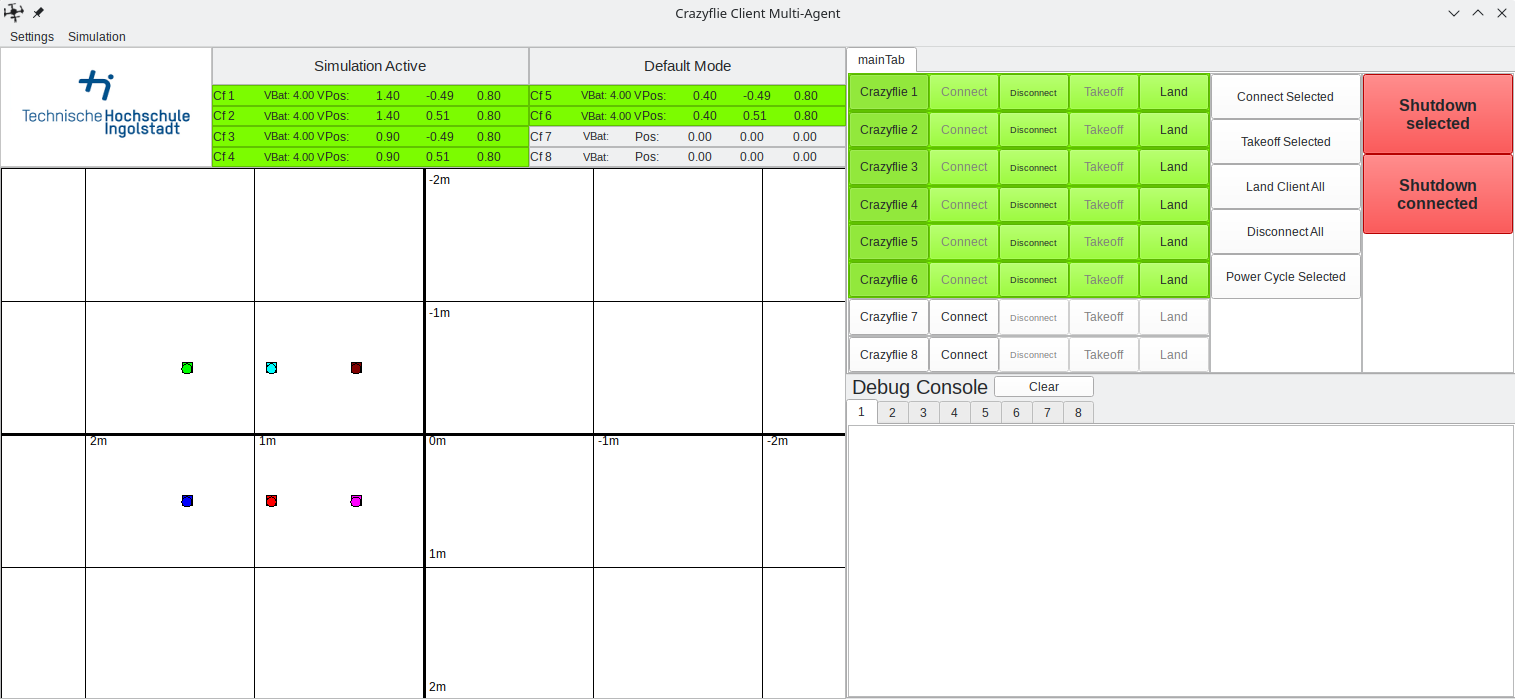
Independent of the simulation we designed a GUI for controlling and monitoring our multi-agent teams. It currently supports up to eight Crazyflies but could be upgraded for bigger teams in the future. So far it has been enough for our requirements.
Multi-Agent Client with six connected Crazyflies
A central feature is the interactive map, which makes up about half of the gui. This is a 2D representation of the flight area with a coordinate system drawn in. Connected Crazyflies are displayed as small circles on the map and a new target position can be assigned by clicking on the map after they have been selected by their corresponding button. If required, obstacles or paths to be flown can also be drawn into the map.
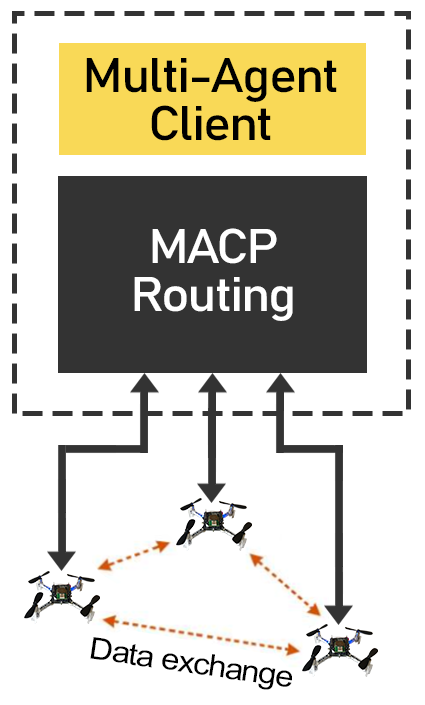
Pseudo-decentralized communication
An important aspect of a truly decentralized system is peer to peer communication. It allows information to be exchanged directly between agents and ideally takes place without a central entity. Currently peer to peer communication is not available in the Crazyflie ecosystem, but is in development.
For this reason, we have implemented a workaround in our client, enabling a pseudo-decentralized communication system. This involves adding an additional layer to the Crazy RealTime Protocol (CRTP), which we named the Multi-Agent Communication Protocol (MACP). It consists of an additional packet header made of the destination ID, source ID and a port as endpoint identifier. Every ID is unique and directly derived from the Crazyflie’s address.
These MACP packets are sent via the unused CRTP port 0x9. The packet routing mechanism implemented in the client forwards the packets to their destination. It is also possible to send packets as a broadcast or to address the client directly.
On the firmware side, we have added a corresponding interface to simplify the sending and receiving of macp packets. It is analogous to the CRTP implementation and allows the registration of callback functions or queues for incoming packets on corresponding ports. It can be activated via KBuild.
At least for use in the laboratory and the development of distributed algorithms, this method has proven its worth for us.
Project
We hope that the sim_cf2 simulation can also be useful to others. The complete source code is available on GitHub. Further information concerning installation and configuration can be found in the readme files in the respective repositories.
We would also like to point out that other simulations have been created that are based on sim_cf and therefore offer similar functionality. One of these projects is CrazySim, also available on GitHub. Moreover, there are ongoing efforts to officially integrate such a software-in-the-loop simulation into the Crazyflie firmware and ecosystem.